<商品情報>
KXR-L4T-Rは、サーボモータKRS-3302を9個搭載した四足歩行ロボットです。背中のバックパック内に搭載したコントロールボードRCB-4miniからの制御により、前後左右の歩行動作や、手を振るなどのアクションが可能です。また、付属パーツの組み換えにより足先を車輪型に変更することもできます。
無料でダウンロードできるモーション作成ソフトHeartToHeart4からロボットのモーションを自由にプログラミングすることができます。また、多数のサンプルモーションをご用意していますので、基本的な動作はプログラミングすることなく簡単に再生することが可能です。
★マニュアル、ソフトウェアは下記のアドレスからダウンロードしてください。
https://kondo-robot.com/faq/kxr_downloadset_v2
<キット内容>
●強化樹脂パーツ
●コントロールボードRCB-4mini
●サーボモーター
KRS-3302 ICS ×9
●ROBOパワーセル Eタイプ 6N-800mAh Ni-MH
●充電器BX-32MH
●Dual USB アダプターHS
●その他パーツ
<ソフトウェア動作環境>
・対応OS/Windows 8.1 / 10 / 11
・USBポート(1.1/2.0)
※使用する.NETのシステム要件を満たすこと。
<完成時サイズ>
カメ型:275(H) x 119(W) x 153(D)mm
ローバー型:272(H) x 146(W) x 162(D)mm
<重量>
カメ型:約630g
ローバー型:約690g
(バッテリー含む)
無料でダウンロードできるモーション作成ソフトHeartToHeart4からロボットのモーションを自由にプログラミングすることができます。また、多数のサンプルモーションをご用意していますので、基本的な動作はプログラミングすることなく簡単に再生することが可能です。
★マニュアル、ソフトウェアは下記のアドレスからダウンロードしてください。
https://kondo-robot.com/faq/kxr_downloadset_v2
<キット内容>
●強化樹脂パーツ
●コントロールボードRCB-4mini
●サーボモーター
KRS-3302 ICS ×9
●ROBOパワーセル Eタイプ 6N-800mAh Ni-MH
●充電器BX-32MH
●Dual USB アダプターHS
●その他パーツ
<ソフトウェア動作環境>
・対応OS/Windows 8.1 / 10 / 11
・USBポート(1.1/2.0)
※使用する.NETのシステム要件を満たすこと。
<完成時サイズ>
カメ型:275(H) x 119(W) x 153(D)mm
ローバー型:272(H) x 146(W) x 162(D)mm
<重量>
カメ型:約630g
ローバー型:約690g
(バッテリー含む)

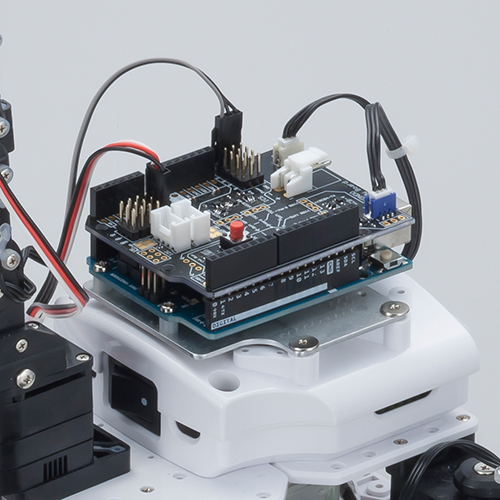
使用例1:Arduino UNOとの組み合わせ
別売りのKXRプログラミング学習用シールドセット(Arduino用)と組み合わせることでArduino Uno R3から弊社製シリアルサーボやコントロールボードRCB-4miniに直接命令を送ることができます。
公開しているサンプルプログラムを使用すれば、PSDセンサ(別売)と組み合わせて簡単な自律ロボットを作成できます。サンプルプログラムでは、頭部を旋回しながら周囲の距離を計測し、データをソートして最も近距離の物体に近づくプログラムを実行します。これは、基本的なプログラム知識を学ぶために最適な内容になっていますので、プログラミング学習を始めた方に最適です。
シリアルサーボやコントロールボードと通信するためのライブラリも公開していますので、数行のプログラムで簡単に制御することができます。
下記のリンクよりサンプルプログラムとマニュアルをダウンロードできます。
『KXR-L4T-R アカデミックパックダウンロードセット Ver.1.0』
●別途準備が必要な製品
・KXRプログラミング学習用シールドセット(Arduino用)
・>PSD(位置検出素子)センサー
・Arduino Uno R3
・USBケーブル(A-B)
公開しているサンプルプログラムを使用すれば、PSDセンサ(別売)と組み合わせて簡単な自律ロボットを作成できます。サンプルプログラムでは、頭部を旋回しながら周囲の距離を計測し、データをソートして最も近距離の物体に近づくプログラムを実行します。これは、基本的なプログラム知識を学ぶために最適な内容になっていますので、プログラミング学習を始めた方に最適です。
シリアルサーボやコントロールボードと通信するためのライブラリも公開していますので、数行のプログラムで簡単に制御することができます。
下記のリンクよりサンプルプログラムとマニュアルをダウンロードできます。
『KXR-L4T-R アカデミックパックダウンロードセット Ver.1.0』
●別途準備が必要な製品
・KXRプログラミング学習用シールドセット(Arduino用)
・>PSD(位置検出素子)センサー
・Arduino Uno R3
・USBケーブル(A-B)
使用例2:RaspberryPiと組み合わせて画像処理
RCB-4に接続されているシングルボードを含むコンピュータで、Pyhtonが動作する環境であればこのライブラリを使用することができます。
RCB-4には、ボード上のUARTもしくはDual USBアダプターHS経由で接続します。
●『RCB-4 Library for Python ver.1.0.0B』
このライブラリを利用してRaspberryPiを搭載したデモ機を作成しました。Arduinoと同じように、処理はRaspberryPi、ロボット(サーボ)の制御はRCB-4と分担することでボードへの負荷を軽減することができます。下記の記事を参考にぜひお試しください。
●『RaspberryPiとRCB-4との連携について』
RCB-4には、ボード上のUARTもしくはDual USBアダプターHS経由で接続します。
●『RCB-4 Library for Python ver.1.0.0B』
このライブラリを利用してRaspberryPiを搭載したデモ機を作成しました。Arduinoと同じように、処理はRaspberryPi、ロボット(サーボ)の制御はRCB-4と分担することでボードへの負荷を軽減することができます。下記の記事を参考にぜひお試しください。
●『RaspberryPiとRCB-4との連携について』

【ご注意ください】
※このキットには、ArduinoやRaspberryPiなどKXR-L4以外の製品は付属しておりません。使用例の通りご利用いただく場合は、別売りの商品をご用意いただく必要がございます。