<商品詳細>
![]()
PMXシリーズは、近藤科学が設計、開発した高機能、高精度なサーボラインアップです。
サーボケース内に、ギヤとモータ、角度センサ、さらにモータドライバを実装した制御基板が一体になっています。
これにより、ケーブル1本を接続し、電源と仕様に合わせたコマンドをサーボに供給するだけで簡単に様々な機能を使用することができます。
パケット通信によるコマンドの送受信により、角度指示による位置制御のみならず、速度、電流(トルク)の指示データによる制御方法を備えています。
また、現在の角度や温度、電流値など多彩なフィードバックを得ることができます。
コンパクトな製品構成を活かした組み込みやすさ、サーボの交換によるメンテナンス性が好評です。
また、高出力なモータを採用しているため、搭載スペースを抑えつつ、高いトルクを発揮します。
5種類の制御モードに切替可能!
サーボは組み込むメカやご利用方法より用途が異なりますが、PMXサーボは制御モードを位置制御、速度制御、電流制御、トルク制御に切り替えることで幅広いニーズに対応することができます。
・位置制御モード
角度(ポジション)を指定し、目標の角度に向けて軸が移動する制御方法です。
一般的なサーボモータの制御モードです。
片側最大320°の範囲で指定することができます。
・速度制御モード
軸の回転速度を指定して動作するモードです。
位置制御モードと組み合わせていない場合は無限回転しますので、車輪やプーリーの動力として使用できます。
・電流制御、トルク制御モード
指定した電流値、または推定トルク値に合わせて一定の出力で動作するモードです。
位置制御モードと組み合わせていない場合は、サーボの軸が無限回転します。
トルク制御は電流値から推定トルクを算出して指令値としています。内部にトルクを検出するセンサは搭載していません。そのため、搭載しているモータや機構部品の個体差により出力するトルクと指令値に差が発生する場合があります。動作は電流制御と同一です。
・PWMモード
モータの出力を指定して動作するモードです。
デューティー比-100.00%(CCW)~+100.00%(CW)の範囲で指定することができます。
制御の組み合わせに対応
上記の制御モードを組み合わせて使用することができますので、組み込み個所や動作に合わせて多彩なモードから最適な制御方法を選択することができます。
組み合わせ例

・位置制御+トルク制御:指定されたトルク値を超えないように出力を制御しつつ、指定した目標角度まで移動します。トルク制御と組み合わせていない場合は、最大トルクで動作します。
・位置制御+移動時間:指定した角度まで、指定した時間で到着するように動作します。「移動時間」を組み合わせることで補間制御による位置制御になります。また、補間制御の種類を選択することにより加減速のパターンを変更することが可能です。

大電流に対応する6ピンのサーボコネクタを採用
これまでのサーボコネクタは、V+、GND、信号線D+/D-の3~4ピンが一般的であり、V+とGNDはそれぞれ1つでしたが、PMX-5200シリーズは6ピンのコネクタを採用することでV+ ×2ピン、GND×2ピンに増設されました。
これにより、これまでの2倍(理論値)の電流を流すことが可能になり、ハイトルクなモータや多数のデイジーチェーン接続に対して、より安定した給電が可能になりました。
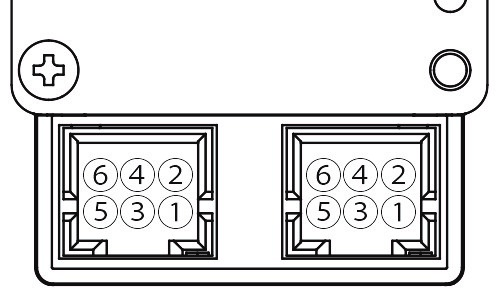
No.6 V+ No.4 D- No.2 V+
No.5 GND No.3 D+ No.1 GND
高精度16bit磁気式エンコーダーを採用
高精度16bitの非接触磁気式エンコーダーを採用しました。
センサに接触する個所がありませんので、繰り返し動作の摩耗による消耗がありません。
また、高精度に角度を読み込むことができますので、これまで以上に安定した制御が可能になりました。
※実際の動作では、機構的ガタや外部の負荷要因により移動時の位置の精度が低くなる場合があります。
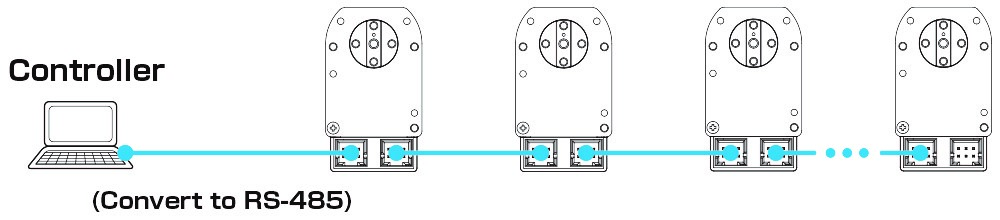
信頼のRS-485規格
通信はRS-485規格に準拠しています。
差動信号のためノイズに強く、3Mbpsの高速通信が可能です。デイジーチェーン接続で最大239個(理論値)のサーボを接続することができます。
コントローラをPCとする場合のUSBアダプターや、マイコンボードとする場合の変換基板をオプションとしてラインアップしています。
こちらの製品をご利用いただくことで、手間のかかる通信周りの準備を簡単に済ませることができます。

メモリーマップ
メモリーマップにより、アドレスを指定してデータを読み書きするだけで手軽にサーボの設定変更や、動作を指示することができます。
使いやすいコマンド体系
PMXシリーズは、用途ごとに専用のコマンドを用意しています。
コマンドを使用することで、動作指示データの送信や、各種パラメータの書き換え、読み出し、データの展開、保存が可能です。
また、コマンドの実行による工場出荷時へのデータリセット機能を搭載しました。
サーボの動作指示に特化したMotorWRITEコマンド
MotorWRITEコマンドにより、サーボに角度や速度など、目標値を送信して動作させることができます。
動作に特化した専用コマンドを用意しました。
制御モードを組み合わせた場合、目標位置、速度、電流値など必要なデータを連結して送信することができますので、最小限のパケットでサーボを制御することができます。
例:位置制御+電流制御を組み合わせた場合

豊富なフィードバック
コントローラからコマンドを受け取ったサーボは、コントローラに返事を返しますが、PMXはサーボから送られてくる返事のパケット内に、サーボの状態を含めることができます。
さらに、どの情報をフィードバックするか指定することができますので、ユーザーは必要最低限のパケットサイズに抑えることができます。
従来はサーボの情報を得るために個別のパケットで取得していましたが、PMXは最小限のパケットの往復で最適な情報を得ることができます。
取得できるデータ:現在位置、現在速度、現在電流値、現在推定トルク値、PWM出力値、モータ温度、CPU温度、入力電圧
例 : 現在位置+現在電流値+現在のモータ温度を選択した場合

比例ゲイン、微分ゲイン、積分ゲイン
位置制御など各制御のPIDゲインを調整することができます。
組み込む機器によって動作特性を変更してご利用いただくことが可能です。
システムエラー検知機能・ソフトウェアリミット
入力電圧の低電圧や過電圧、CPU温度、モータ温度の高温検知、モータロックなど各種エラー情報をもとに、サーボが自動で出力を抑制する機能を搭載しています。
また、各リミッタの制限値を任意の値に変更することも可能です。
リミッタを搭載することで、事前に故障の原因を減らすことができます。
リミッタ種類:入力電圧、モータ最大消費電流、モータ最大温度、CPU最大温度、位置制御動作制限、速度指令値制限、電流指令値制限、トルク指令値制限、ロック検知
※リミッタ機能は完全に故障を防ぐものではありません。ご利用いただく際は、安定した電源をご用意いただき、なるべく発熱しない環境、モータロックしない設計、動作にてサーボに過剰な負荷がかからないようにご注意ください。
各環境に合わせたライブラリを公開
Python、Arduino、C#などの環境に適したライブラリを公開する予定です。ライブラリにより、数行のプログラムでPMXサーボを制御することが可能になります。
2023.10.25 『PMX Library for Python』を公開しました。
2023.12.25 『PMX Library for Arduino』を公開しました。
オンラインマニュアル
また、PMXシリーズのサーボモータを制御するためのコマンドリファレンスを公開しています。こちらの内容に沿ってコマンドを送信することで、自由にサーボを動かすことが可能です。
『PMXサーボシリーズ オンラインマニュアル』
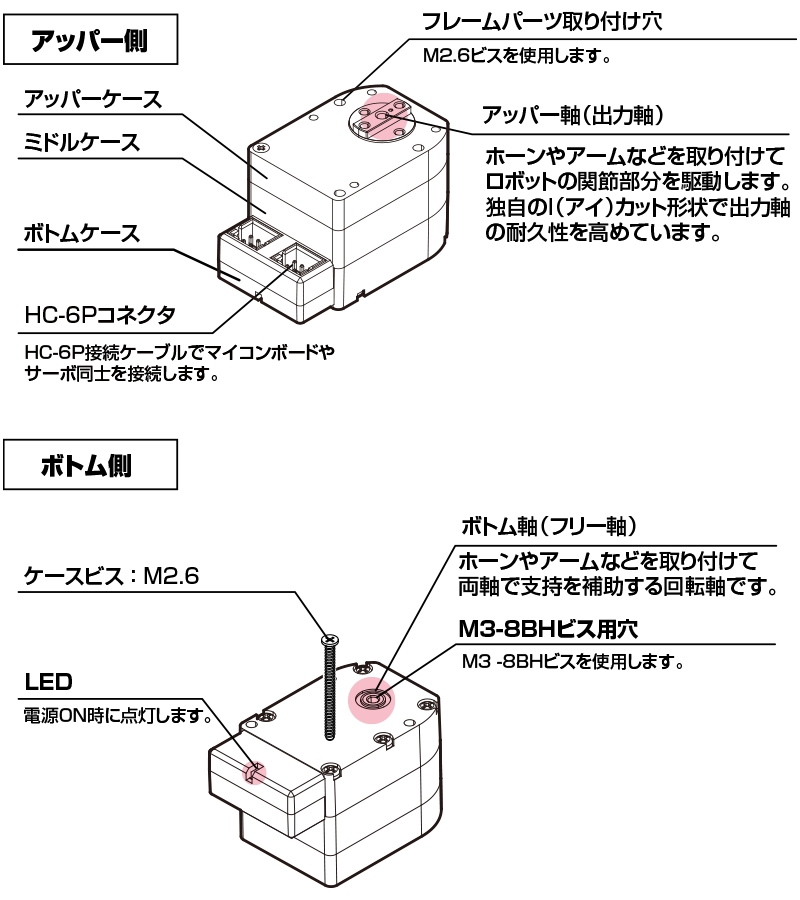
■機構部について
●出力軸:Iカット型
PMX-5200シリーズは、Iカット型出力軸を採用しました。出力軸の径を太くすることで、破断に対する耐久性が従来より約1.8倍向上しました。
また、Iカット型はこれまでのセレーション(ギザギザ)形状に比べて長期間の使用に対する出力軸のガタツキが軽減されています。
平面が多い出力軸には、自身で制作したホーンやフレームを直接取り付けることも可能ですので、組込みし易さも向上しています。さらに、Iカット型専用のホーンを取り付けることで、従来と同じようにフレームを固定することができます。
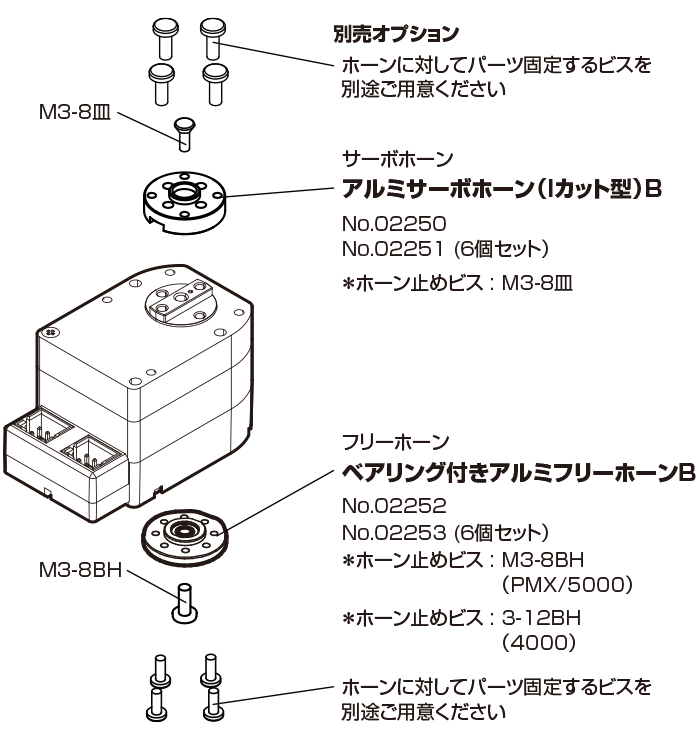
対応オプション:アルミサーボホーン(Iカット型)B


●ギヤ:特殊アルミギヤ+ステンレスギヤ
強度が非常に高く軽量な特殊アルミギヤを標準装備。
さらにサードギヤにステンレス製のギヤを組み入れることで強度がアップしました。
サードギヤは、肉抜きにより軽量化されています。
出力軸を大径のベアリングで支持することで、さらに安定性を向上。
本製品にはスピードタイプのギヤが組み込まれています。


●ケース:PMX-5200シリーズ
・高強度のアルミケースを採用
PMX-5200は、トップケースとミドルケースをアルミ製にすることで、ギヤシャフトのガタツキを軽減しハイパワーな出力に耐えうる高剛性、高強度な性能を実現しています。
サーボ本体の剛性を確保しつつ、ロボットの骨格となる外部のフレームもこのアルミミドルケースに固定することができます。
ミドルケースは、モータのヒートシンクも兼ねており、冷却効率がアップしました。
・ケースビス
ケースビス、及びフレーム固定用ビスはM2.6を採用。
サーボ本体の剛性を確保しつつ、フレームをより強固に固定することができます。
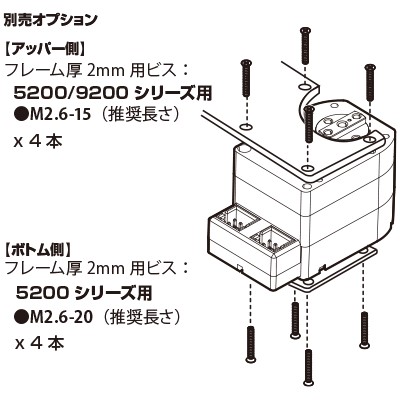
フレームの固定には、下記のM2.6ビスセットがお勧めです。
対応オプション:
M2.6-16低頭ビス(50本入り)
M2.6-18低頭ビス(50本入り)
M2.6-20低頭ビス(50本入り)
・フリーホーンを取り付け可能
ボトムケースには、出力軸のホーンと対になるフリーホーンを固定できます。
フリーホーンを使用することで両軸支持のフレームパーツを固定することができます。
対応オプション:ベアリング付きアルミフリーホーンB


・ケーブル脱着式
ケーブルは脱着式で必要な長さのケーブルに交換することができます。コネクタが2つ実装されていますので、サーボに任意のIDを割り振ることによりサーボ同士を数珠状につなぐデイジーチェーン接続をすることが可能です。
対応オプション:HC-6P接続ケーブル
■寸法図
フレームの設計用に3D、2Dの寸法図をダウンロードしてご利用いただけます。
こちらのページをご参照ください。
『PMX-5200シリーズ 寸法図』
■各部名称
■軸へのパーツ固定
軸にパーツを固定する場合は、ホーンを使用します。
出力軸と、フリー軸で対応するホーンが異なりますのでご注意ください。
■搭載方法
●サーボケースへのパーツ固定
ケースに固定されているM2.6-13 / M2.6-16ビスを取り外します。
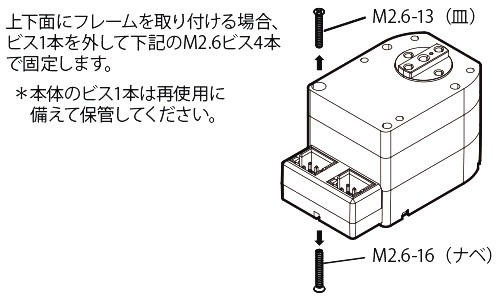
対応オプション:
M2.6-16低頭ビス(50本入り)
M2.6-18低頭ビス(50本入り)
M2.6-20低頭ビス(50本入り)
フレームの固定に使用するビスの長さは、下記のPDFを参考にしてください。
『フレーム取付ビス参考図 PMX-5200シリーズ』
■制御方法
●PCから制御する
RS-485 USBアダプターHSを使用することで、PCから直接サーボを制御することができます。公開されているソフトウェアマニュアル(コマンドリファレンス)をもとにコマンドを送信します。通信方法やサンプルプログラムも公開していますので、詳細は下記の記事をご覧ください。
【制御に必要な製品】
・接続機器:RS-485 USBアダプターHS
・電源分配基板(6pin端子)(アダプターに付属)
・電源ケーブル:電源ケーブルA(アダプターに付属)
またはHV電源スイッチハーネス
・電源(以下の「電源」をご参照ください。)
【構成図】

●市販のマイコンボード、小型PCボードから制御する
市販ボードのUART端子からPMXサーボを制御することができます。PMXサーボはの通信仕様はRS-485ですが、RS-485変換基板を中継することでUARTから通信できるようになります。通信方法、コマンドについてはソフトウェアマニュアル(コマンドリファレンス)をご参照ください。
【構成図】
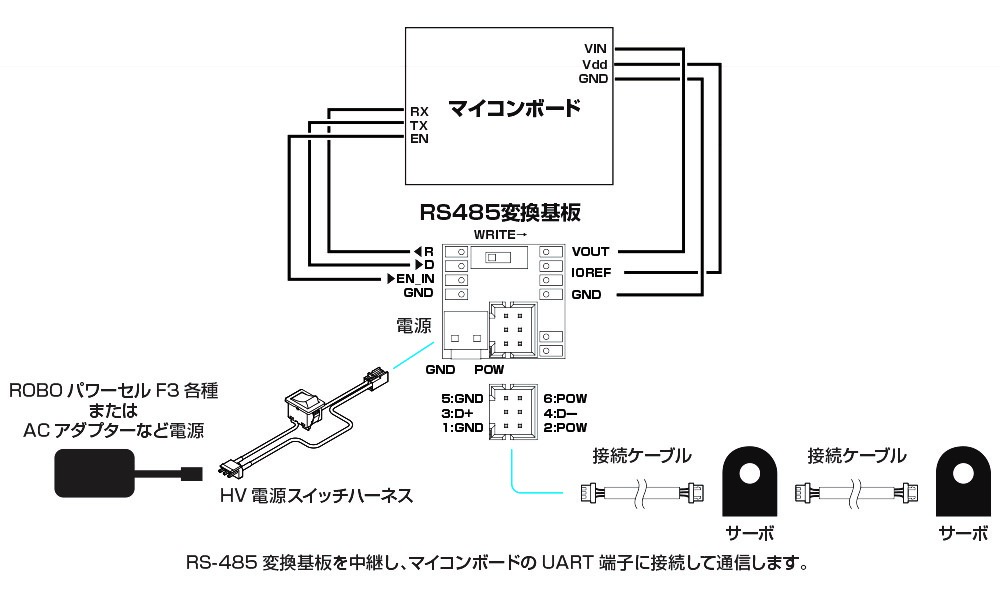
【制御に必要な製品】
・接続機器:RS-485変換基板
・電源ケーブル:電源ケーブルA(アダプターに付属)
またはHV電源スイッチハーネス
・電源(以下の「電源」をご参照ください。)
●シリアルマネージャー
PMX マネージャーソフトウエアを使用することで、サーボのIDや通信速度、各種パラメータを設定することができます。
『PMX Managerソフトウェア』(準備中)
■電源
PMXサーボには、3セル(9.9V)のリチウム系バッテリーをご利用ください。
弊社ラインナップでは、下記のリチウムフェライトバッテリをご購入いただけます。


【対応バッテリー】
・ROBOパワーセル F3-850タイプ (Li-Fe)
・ROBOパワーセル F3-1450タイプ (Li-Fe)
※バッテリーの取り扱いには注意が必要です。こちらの注意事項をよくお読みになってからご利用ください。
【充電器】
バッテリーの種類、容量にあった充電器をご用意ください。
【安定化電源】
市販の安定化電源をご利用ください。
電流容量が10A以上あると5軸のアームロボットにご利用いただくことができますが、サーボにかかる負荷が多い場合は出力に余裕のある電源をご用意ください。
※容量不足のため、ACアダプターを電源としてご利用いただくことはできません。
<スペック>
(12.0V時)
●最大トルク:4.08[Nm] (41.6[kgf・cm] )
●無負荷回転数:95[rpm](0.10[s/60°])
(11.1V時)
●最大トルク:3.78[Nm] (38.6[kgf・cm] )
●無負荷回転数:87[rpm](0.11[s/60°])
●寸法:54.5×32.5×32(突起部除く)
●ケース種類:PMX-5200シリーズ
●モータ種類:コアレスモータ
●重量:93[g]
●最大動作角度:±320[degree] ※位置制御モード時
●動作電圧:安定した電源で9V~12V
●待機電流:21[mA](12.0V時)
●最大ストール電流:3.9[A](12.0V時)
●減速比:237.6:1
●ギヤ種類:特殊アルミギヤ
ステンレスギヤ(3rdギア)
スチール(ピニオンのみ)
●ケース材質:アルミ(トップ、ミドル)
ガラス入り樹脂(ボトム)
●動作環境温度:0~40[℃]
●制御分解能:16bit/1round(0~65535)
●インターフェース:RS-485準拠
●通信速度:3M, 2M, 1.5M, 1.25M,
1M, 115.2K, 57.6Kbps
●ID:0~239
●パリティ:なし, 奇数, 偶数
●初期値:ID0, 115.2Kbps, パリティなし
●動作方式:位置制御、速度制御、トルク制御、電流制御、PWM制御
<接続機器>
●RS-485 USBアダプターHS
●RS-485変換基板
<付属品>
【単品】
HC-6P接続ケーブル(400mm) ×1本
Made in Japan





RS-485 USBアダプターHS
販売価格(税込): 4,950 円
RS-485通信規格対応の機器とPCをUSB経由で通信するための変換アダプタです。
PCのUSBの信号をRS-485通信規格に合わせた信号に変換することができます。

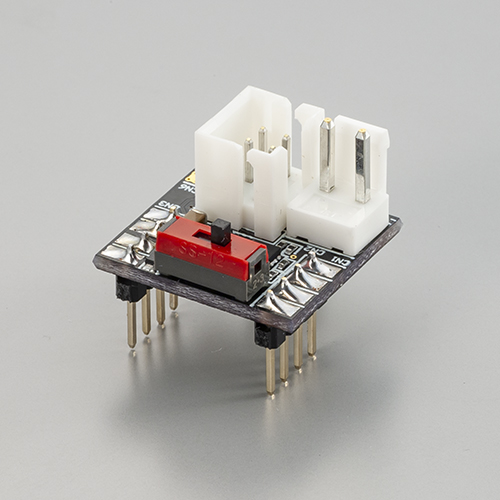
RS-485変換基板
販売価格(税込): 2,530 円
RS-485通信規格対応の機器とマイコンボードが通信するための変換アダプタです。
マイコンボードのシリアル端子(TX/RX)の信号をRS-485通信規格に合わせた信号に変換することができます。

アルミサーボホーン(Iカット型)B
販売価格(税込): 1,100 円
Iカット型出力軸用のアルミ製サーボホーンです。
このパーツを使用することで、出力軸にフレームを固定できるようになります。
PMX-5200/9200とKRS-5000/9300シリーズに対応しています。
アルミサーボホーン(Iカット型)B 6個セット
販売価格(税込): 5,500 円
Iカット型出力軸用のアルミ製サーボホーンです。
このパーツを使用することで、出力軸にフレームを固定できるようになります。
PMX-5200/9200とKRS-5000/9300シリーズに対応しています。

ベアリング付きアルミフリーホーンB
販売価格(税込): 1,320 円
KRS-9300/5000/4000シリーズ、PMX-5200/9200シリーズ用のアルミフリーホーンです。
ベアリング装備でスムーズな両軸支持が可能。
高精度、高強度なアルミ製。
アルミサーボホーンと対で使用することでサーボアームなどを固定することができます。
ベアリング付きアルミフリーホーンB 6個セット
販売価格(税込): 6,600 円
KRS-9300/5000/4000シリーズ、PMX-5200/9200シリーズ用のアルミフリーホーンです。
ベアリング装備でスムーズな両軸支持が可能。
高精度、高強度なアルミ製。
アルミサーボホーンと対で使用することでサーボアームなどを固定することができます。