B3M-SC-1170-A 詳細スペック
・無負荷回転数:46[rpm](0.21[s/60°])
・減速比:362.88:1
・動作電圧:安定した電源で6V~12V
・待機電流:68[mA]
・動作環境温度:0~40[℃]
・重量:105[g]
・寸法:51×32×39.5mm 寸法図ダウンロード
・最大動作角度:±320[degree](±327.67[degree])
位置制御モード時

・制御分解能:12bit/1round(0~4095)
・動作方式:位置制御、速度制御
・360°無限回転モードはモード切替で使用可です。
■ケース材質
・重量:105 [g]
・寸法:51×32×39.5mm 寸法図ダウンロード
・ケース種:B3M-1100シリーズ
【ケース】
・トップケース:ジュラルミン
・ミドルケース:ジュラルミン
・ボトムケース:ガラス入り樹脂
【ギヤ】
・ギヤ1:超々ジュラルミン
・ギヤ2:超々ジュラルミン
・ギヤ3:超々ジュラルミン
・ファイナルギヤ:アルミ合金
■制御方式
・位置制御時:PID制御
・速度制御時:PI制御
・モーター:コアレスDCモーター
・通信方式:RS-485(半二重通信)
・角度センサー:12 [bit]磁気式エンコーダー使用
・各種リミッター:ロック検知、モーター過電流、動作角度制限、温度制限、動作電圧制限など
・ゲインプリセット機能:PIDゲインを最大3つのプリセットから選択可能
・各種システムエラー検知:各エラー発生時に本体にエラー内容を保持します。
・エラー内容に合わせてステータスLEDが点滅します
・コマンド:シンプルな6種類のコマンドを持ちます
【Load】Flashメモリーに保存されているデータをRAM(メモリーマップ)へ書き出す
【Save】RAM(メモリーマップ)上のデータをFlashメモリーへ保存する
【Read】メモリーマップドIOからアドレス指定でデータを読み取る
【Write】メモリーマップドIOにアドレス指定でデータを書き込む
【Position】複数台のサーボモーターを軌道生成しながら同時に動かす
【Reset】時間を指定してシステムを再起動する
・パラメーター保存機能:本体のFlash ROM領域に各種パラメーターを保存できます
・リセット機能:外部よりリセットを時間指定で掛けることができます
・シングル・マルチキャスト命令:個別のサーボだけでなく、全体あるいは一部に一斉に命令を送ることができる(制限有り)
■通信・パラメーター仕様
・通信形式:RS-485
・転送モード:半二重非同期通信
・通信プロトコル:データ長8bit/スタート1bit/ストップ1bit/パリティ無し
・コマンドシグナル:デジタルパケット
・主なパラメータ:ID番号、各種制限項目、PID制御各種ゲインなど約60種類
・固有ID数:0~254(255はブロードキャストIDとして予約)
・通信速度:最大3Mbps、標準1.5Mbps(ガードタイム200us程度)
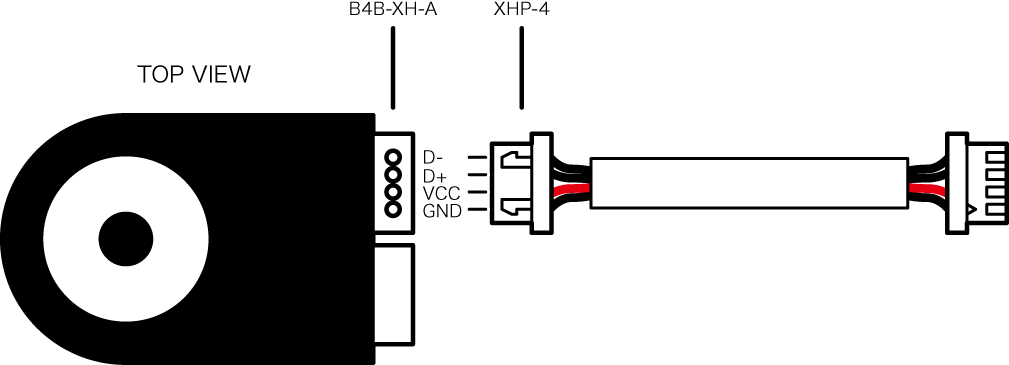
・コネクター
日圧XHP-4 ⇔ B4B-XH-A
1pin GND/2pin Vcc/3pin D+/4pin D-
デイジーチェーン:RS-485ラインを複数台のデバイスで共有できる
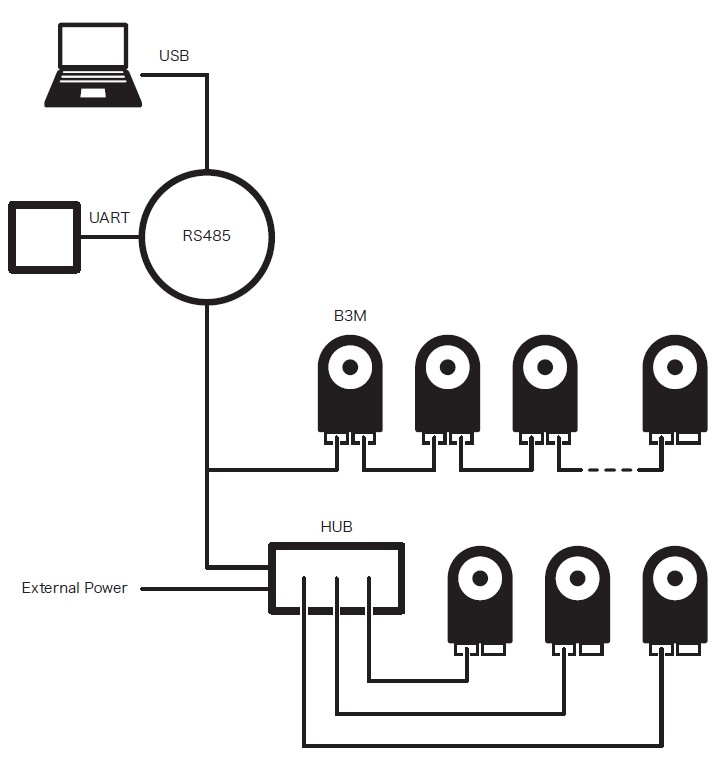
本製品は、「RS485USB/シリアル変換アダプター」を使用することでPC、またはUARTを用いた機器で制御します。RS485USB/シリアル変換アダプターの製品マニュアルはこちらからご覧いただけます。
※外観、仕様など予告なく変更される場合があります。予めご了承ください。