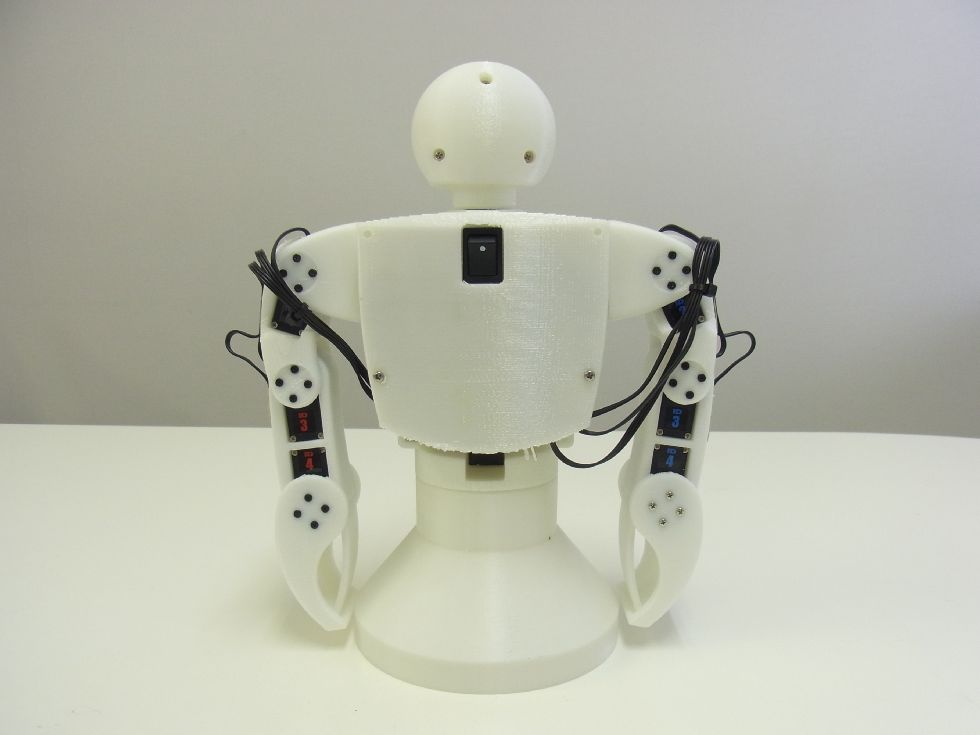
上半身ロボットサンプルデータ
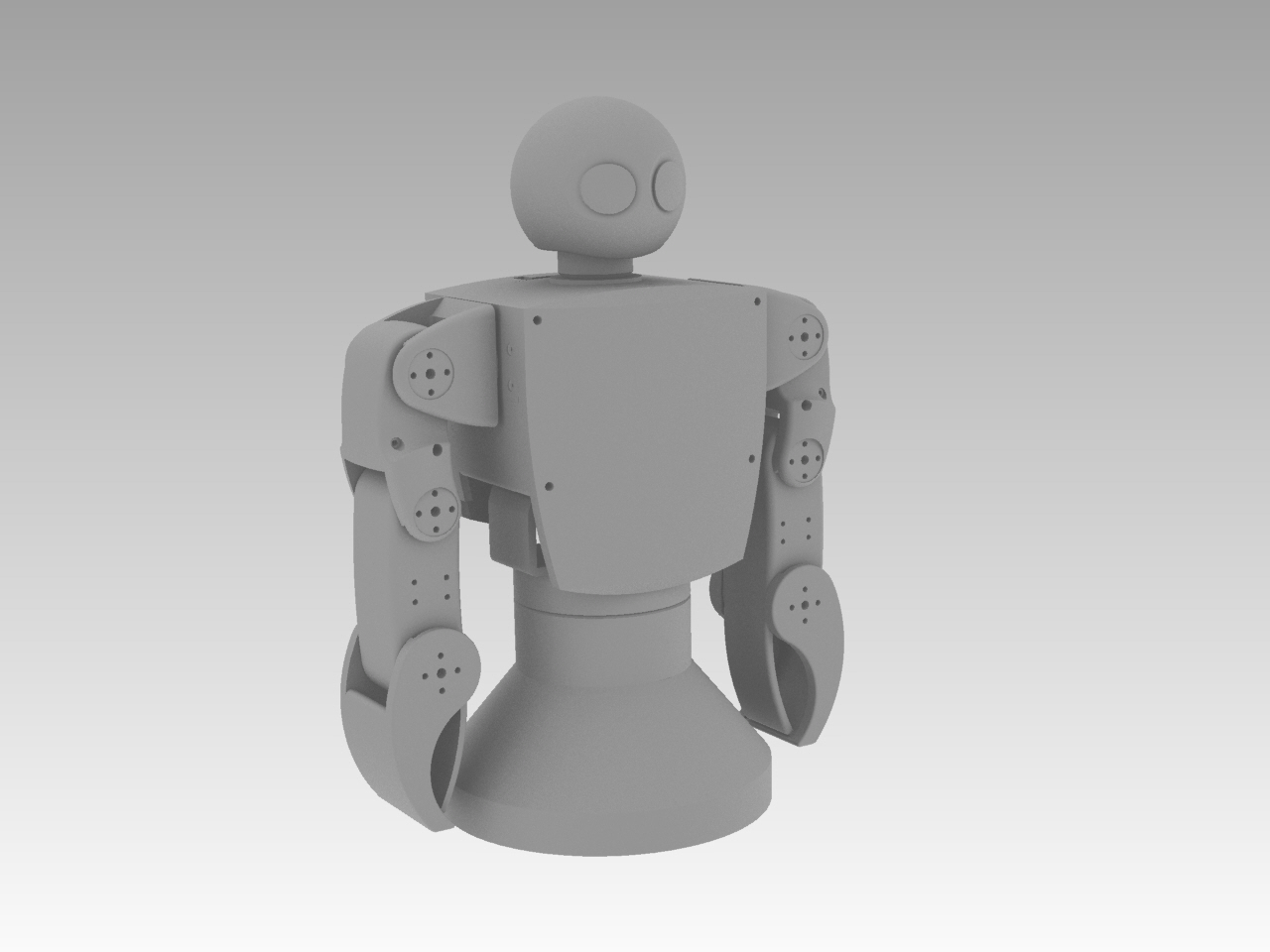
KRS-3204を使用した上半身のヒューマノイド型ロボットのサンプルデータを公開します。
全ての関節にKRS-3204を使用しており、頭部に1軸、腕部に4軸ずつ(ハンド含む)、腰に1軸使用し、合計10個のサーボで動作しています。
ボディー内部には、コントロールボードRCB-4HVやKCB-5が搭載できるスペースが用意されています。
3Dデータですのでデザインを変えたり、軸を増やしたり、また一部使用してKRS-3204用のフレームとしても使用できます。
ロボット作成のサンプルとしてご利用ください。
※ご利用の3Dプリンターによって出力されるパーツの精度が変わりますので、必要に応じて調整してください。
【3Dプリンター出力例]



■使用しているパーツ
・KRS-3204 ICS ×10
・小径フリーホーンC(PCDφ12-M2-オフセット0) ×8
・LV電源スイッチハーネス ×1
・1.7-5低頭タッピングビス(サーボとフレーム固定用)
・2-6PHタッピングビス(ホーンとフレーム固定用)
以下は社外製品です。
・M3-20ビス(ボディーカバー固定用)
・電源 ACアダプター 6V2A ×1
・ハブ基板(自作)
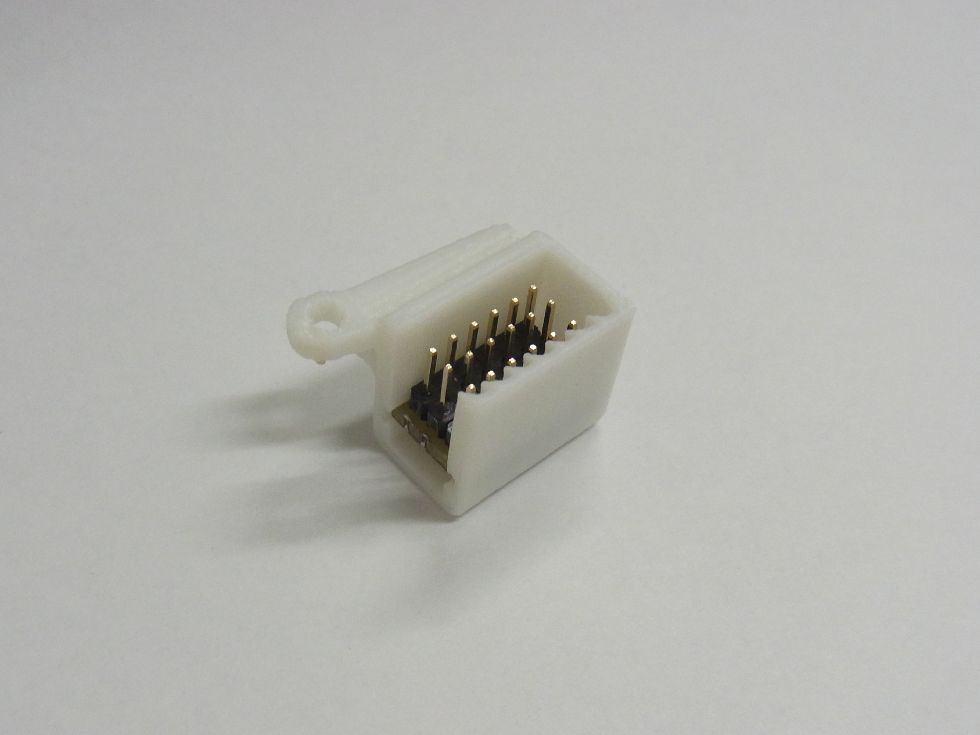
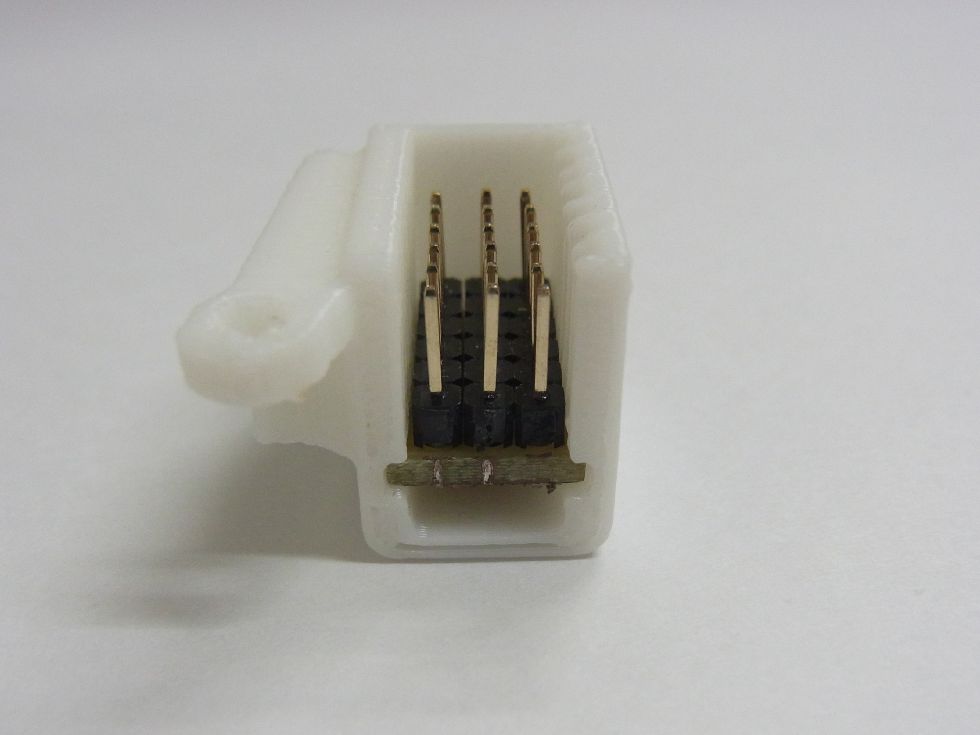
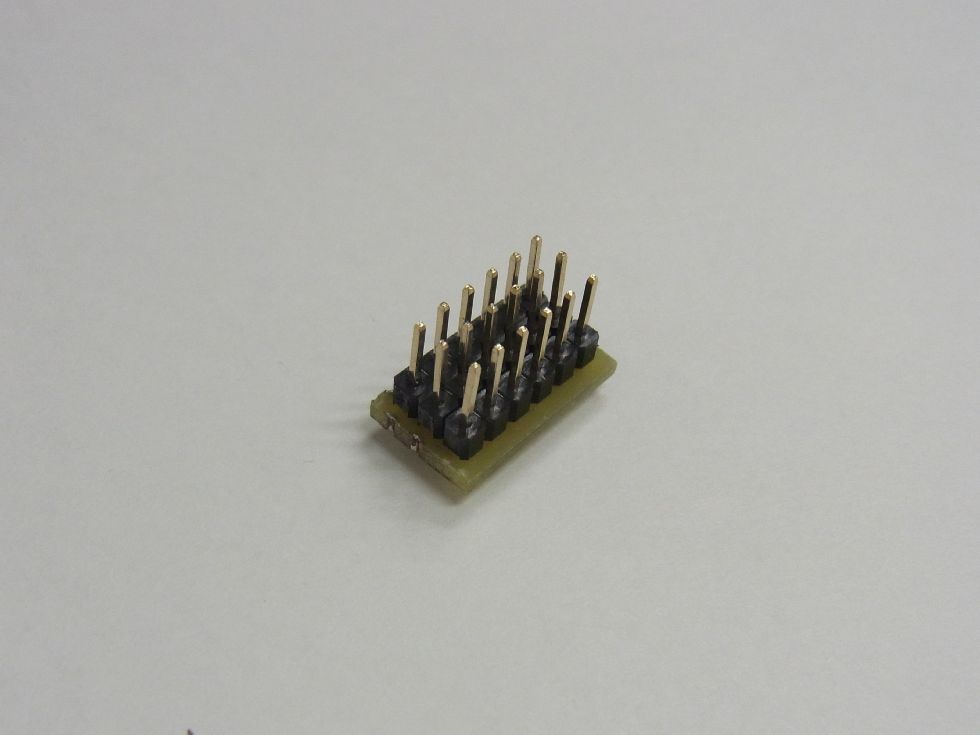
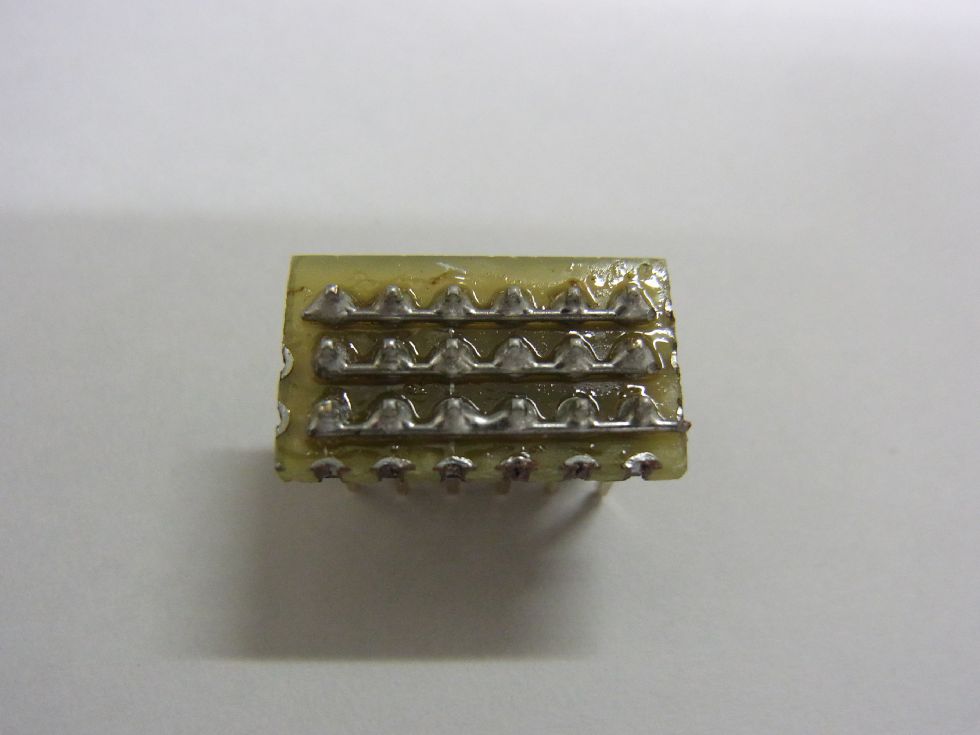
※KRS-3204をマルチドロップ接続するためにハブ基板をご用意ください。こちらはユニバーサリ基盤に2.54ピッチのヘッダピンを立て、各端子を繋げるだけで完了します。ボードへの接続は、接続ケーブルを使用しています。必要な長さをご選択ください。
※画像は、サンプルデータ内のハブパーツとデザインが若干異なります。
KRS-3204 ICSの詳細をみる