PMXサーボを使ってみよう マイコンボードから制御「準備編」
PMXサーボは、RS-485規格の信号に変換できる基板を使用することで、シリアル端子を持つ市販のマイコンボードから制御することが可能です。この記事では、マイコンボードからPMXサーボを制御するために必要な製品と接続方法について解説します。
■PMXサーボラインアップ

こちらのカテゴリーをご参照ください。この記事の情報は、すべてのPMXサーボに対応しています。
■マイコンボードから動かすために必要な製品
・接続機器:RS-485変換基板
・電源ケーブル:電源ケーブルA(変換基板に付属)
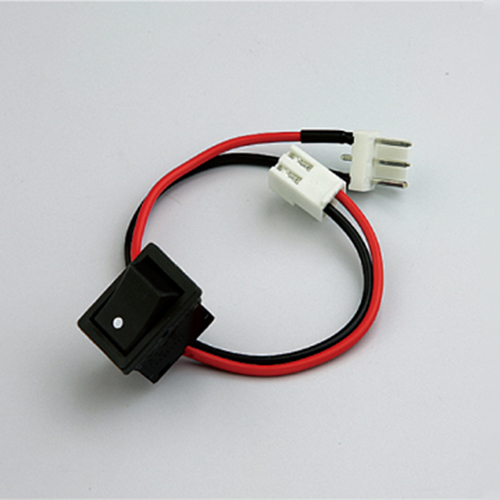
またはHV電源スイッチハーネス
・電源:9.0~12.0V出力の安定化電源(消費電流はサーボの機種、個数で変わります)
LiFeやLiPoの3cell等のバッテリー
例)ROBOパワーセルF3-850
ACアダプター(消費電流はサーボの機種、個数で変わります)
例)ACアダプター(12V5A)
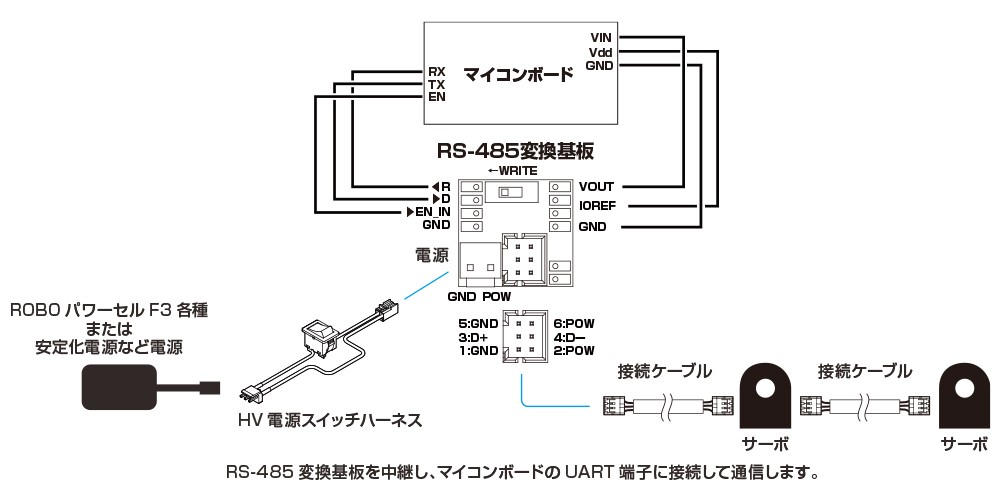
■RS-485変換基板について
RS-485通信規格対応の機器とマイコンボードが通信するための変換アダプタです。マイコンボードのシリアル端子(TX/RX)の信号をRS-485通信規格に合わせた信号に変換することができます。本製品とマイコンボードの各端子を接続することで簡単に使用することができます。
電源端子を用意していますので、機器への電源供給も簡単に行えます。付属の電源ケーブルAや別売りのHV電源スイッチハーネス、またはLV電源スイッチハーネスと組み合わせてご利用ください。
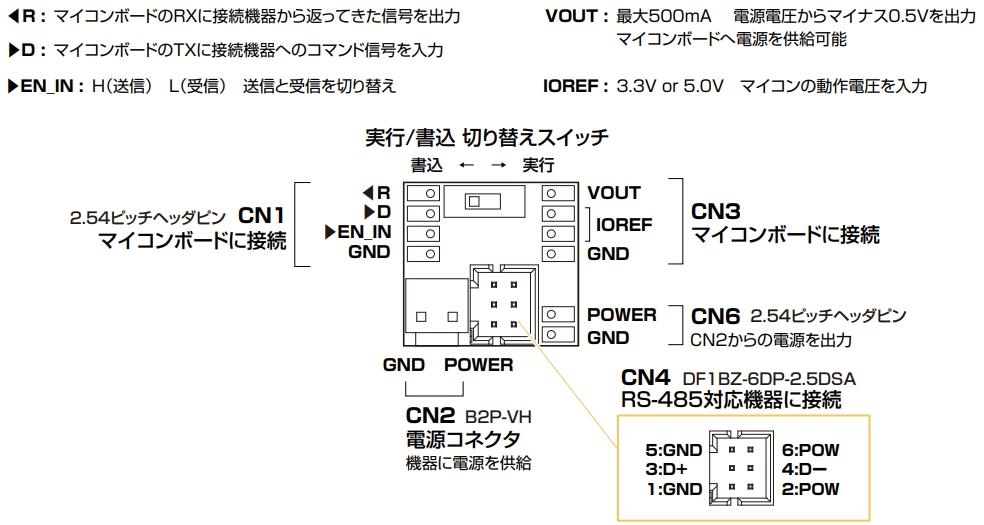
ドライバICが5Vの信号入力でも動作可能ですので、3.3Vのシリアル信号だけでなく5Vのシリアル信号も使うことができます。マイコンの動作電圧を変換基板のIOREFに接続してください。
※本製品はヘッダピンをはんだ付けする必要があります。
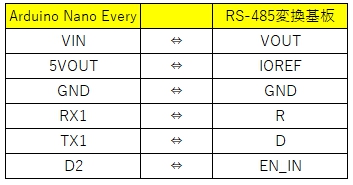
●ピン配置
■接続方法
この記事ではArduino Nano Everyを例に解説します。
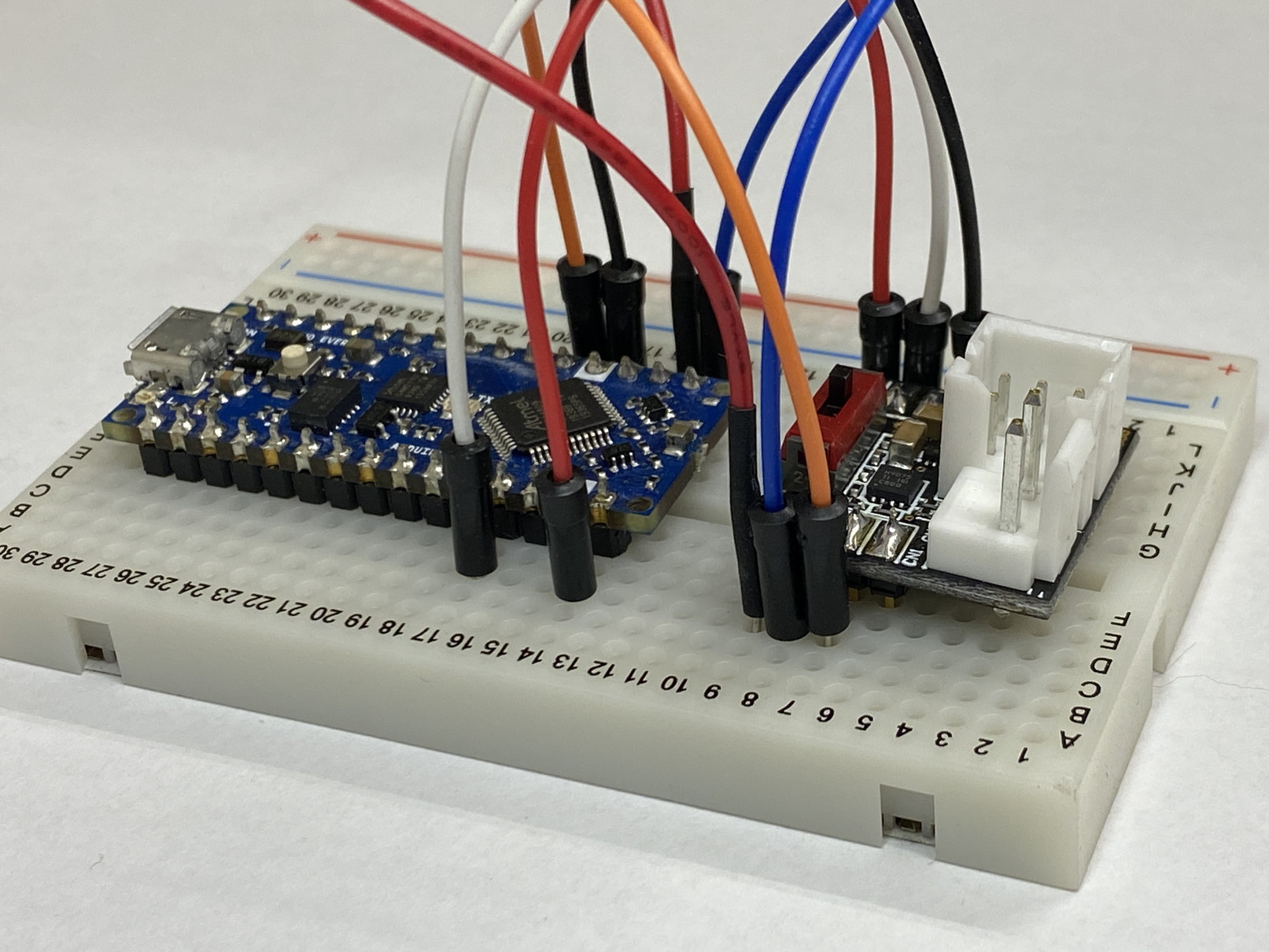
ブレッドボードにRS-485変換基板とArduino Nano Everyを挿し、下記のように端子同士を接続します。EveryのVINピンはHVの9~12Vでも直接接続できます。
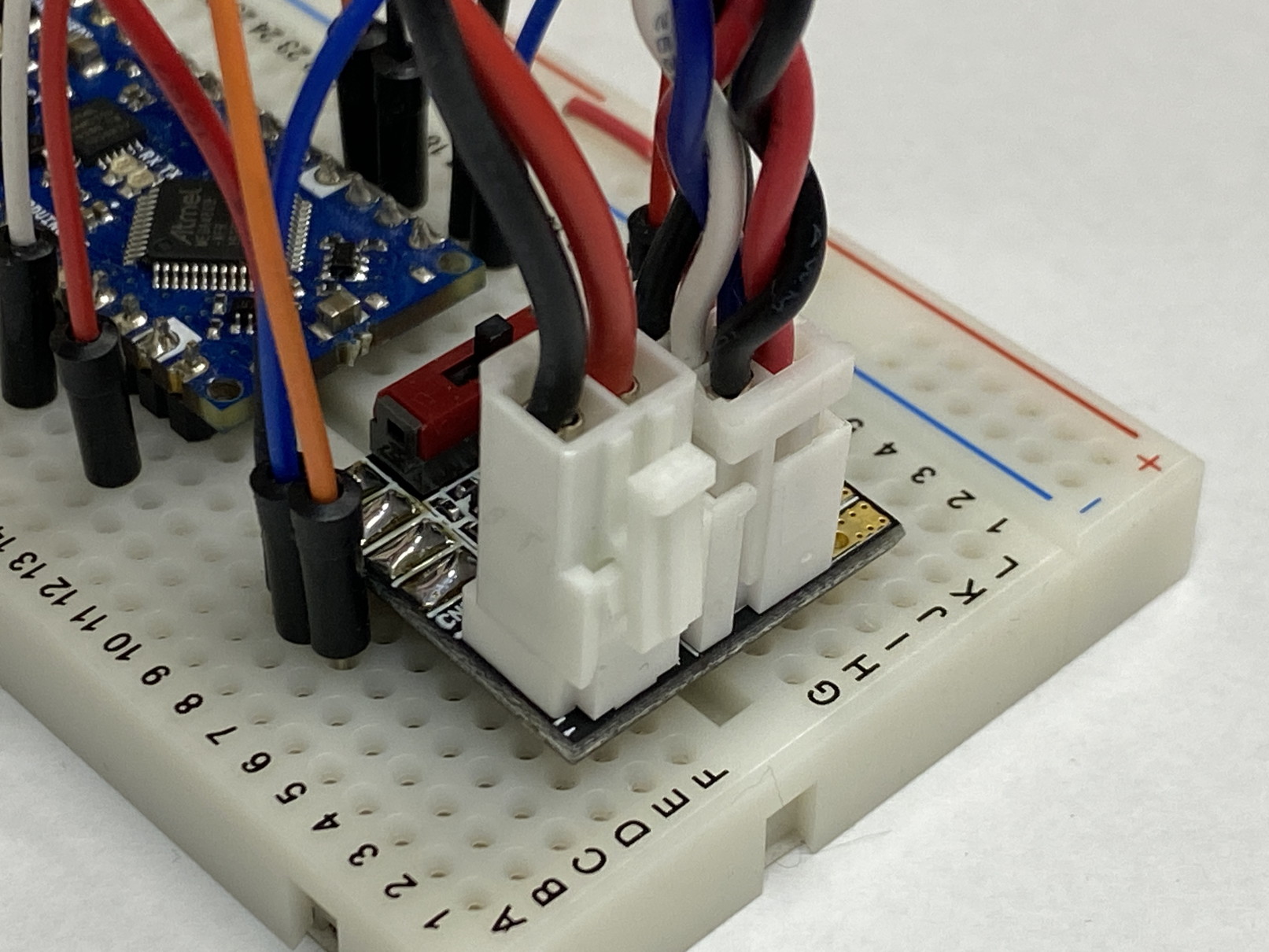
RS-485変換基板にサーボを接続します。コネクタには爪があり、一方向にしか刺さりませんので確認して接続してください。
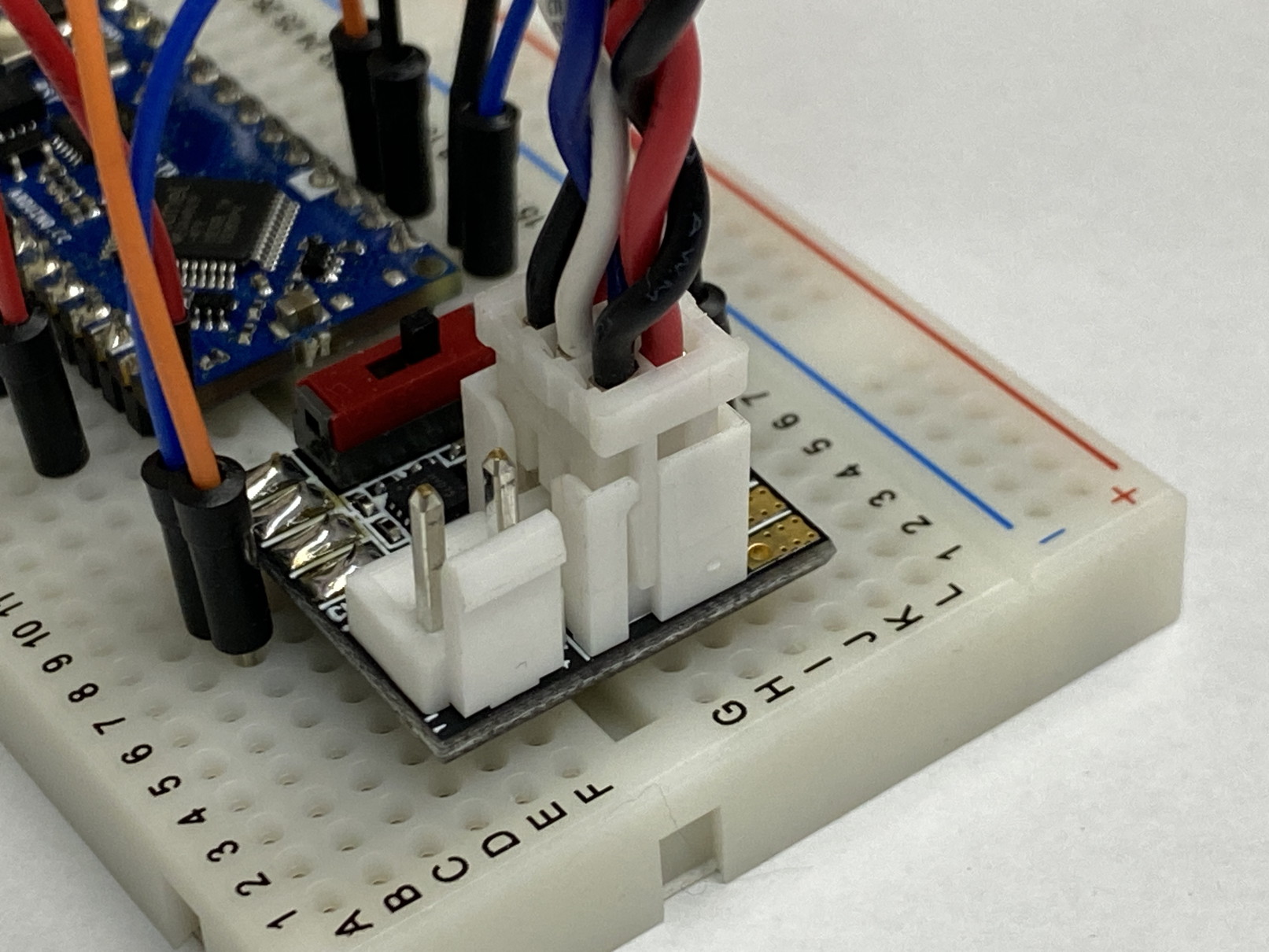
最後に電源ケーブルをRS-485変換基板の電源端子に接続します。スイッチがOFFであることを確認してから電源につないでください。
電源をONにする前に、再度配線を確認し挿し間違い、逆接が無いように十分ご注意ください。
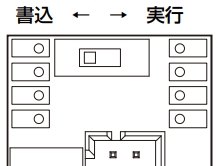
■切り替えスイッチ
RS-485変換基板に実装されている「書込」「実行」の切り替えスイッチは、Arduino UNO R3のように、ボードにシリアル端子が1セットしか装備されておらず、USBと共有しているときに使用します。Everyのように切り替えが必要ない場合は、常に「実行」のままにしてください。
■電源の接続について
「電源分配基板(6pin端子)」の電源端子に使用できるケーブルとして「電源ケーブルA」が付属しています。片側はコネクタが圧着されていませんので、使用する電源に合わせて加工してください。※電源の極性にご注意ください。

以下は電源ケーブルAに圧着されているコネクタと、電源分配基板の電源端子に実装されているコネクタの型番です。ケーブルを自作する際に参考にしてください。
・ケーブルに圧着されているコネクタ
ハウジング:VHR-2N
コンタクトピン:SVH-21T-P1.1
・電源分配基板の電源端子
コネクタ:B2P-VH
近藤科学のROBOパワーセルをご利用いただく場合は、電源スイッチハーネスをご利用いただくと便利です。
・HV(9~12V)バッテリの場合:HV電源スイッチハーネス
■開発環境
上記の他に、Arduinoをプログラミングするためのスケッチのインストール、ライブラリのインポートが必要です。スケッチのインストール方法は、Arduinoのページをご参照ください。ライブラリのインポート方法は、次回の記事で解説します。
※弊社は各ソフトウェアのサポートはできませんので、本記事では開発環境の解説は省略します。
■PMX Library for Arduino
PCから制御するプログラムは、「PMX Library for Arduino」を例に解説します。以下のページからzipファイルをダウンロードてください。※zipファイルはそのまま「インクルード」します。解凍せずにそのまま次の記事をご一読ください。
サンプルプログラムやライブラリのソースコードを確認したい場合のみ解凍してください。
■オンラインマニュアル
PMXシリーズのサーボモータを制御するためのオンラインマニュアルを公開しています。PMXサーボを制御するための詳しい情報が記載されていますので、記事の解説と一緒にご一読ください。
以上で準備は整いました。次回からは下記の順でPMXを制御する方法を解説します。
・サーボからデータを読み出すMemREADコマンドについて
・サーボにデータを書き込むMemWRITEコマンドについて
・サーボに動作を指示するMotorWRITEについて
・組み合わせ制御の方法について
・速度制御、電流制御、トルク制御、PWM制御について
『サーボに動作を指示するMotorWRITEについて』で実際にサーボが動作します。もしすぐに動かしたい場合は、『サーボに動作を指示するMotorWRITEについて』からご一読ください。
次の記事『PMXサーボを使ってみよう マイコンボードから制御「MemREAD編」』
PMX-SCR-9204HVの詳細をみる PMX-SCR-9203HVの詳細をみる PMX-SCR-5204HVの詳細をみる PMX-SCR-5203HVの詳細をみる