KMR-P4 4脚ロボットを6脚ロボットに組み替える
KMR-P4は、樹脂ギヤサーボモータKRS-2542HV ICSを使用した4脚ロボットです。コントロールボードにはRCB-4HVを搭載していますので、モーション作成ソフトHeartToHeart4を使用すれば簡単にモーションを作成することがきます。5V駆動のアナログセンサーを最大10個まで搭載することが可能です。

このKMR-P4は以下の製品を追加することで、4脚ロボットから6脚ロボットに組み替えることが可能です。
・03057 KRS-2542HV ICS オープン価格 ×4個

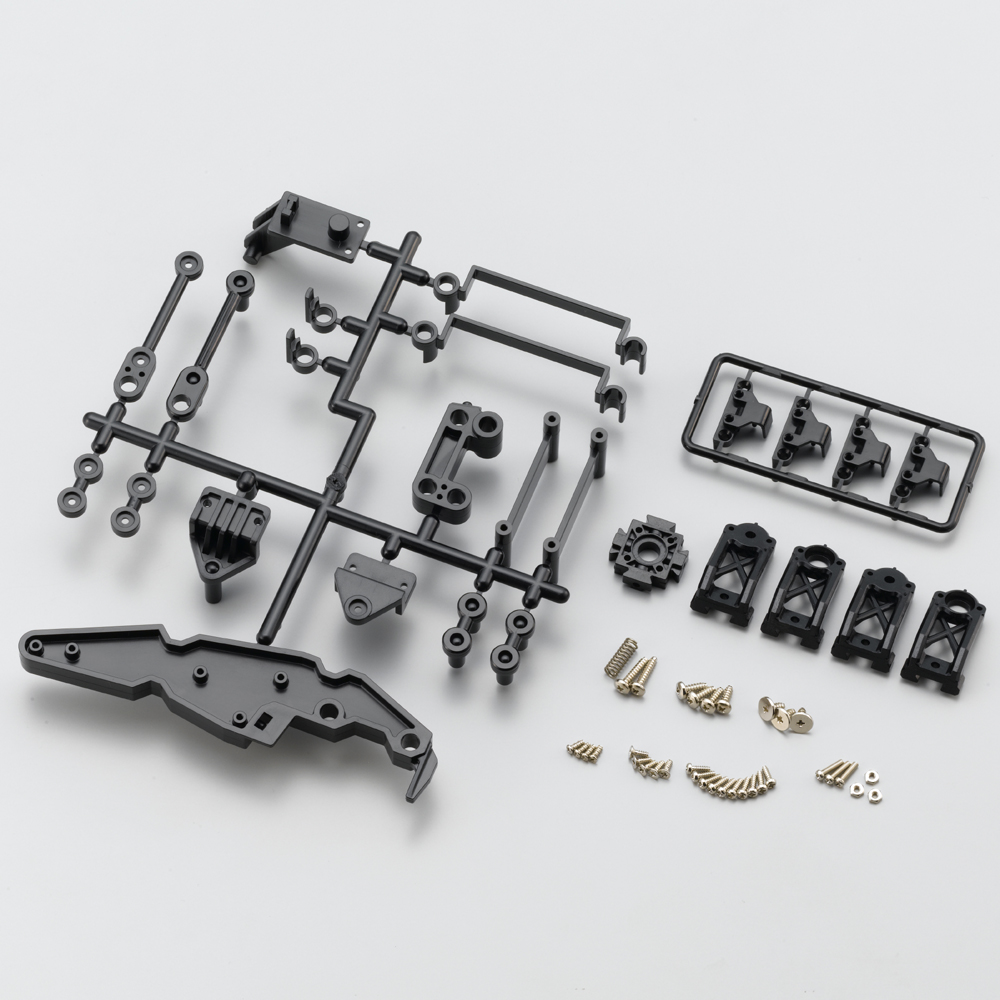
・02106 多脚ロボット用レッグユニットセットtypeA \1,575 ×2セット
・02061 ZH接続ケーブルA(ZH⇔ZH)100mm \420 ×2本

・02072 ZH接続ケーブルB(ZH⇔サーボコネクタ)200mm \420 ×2本

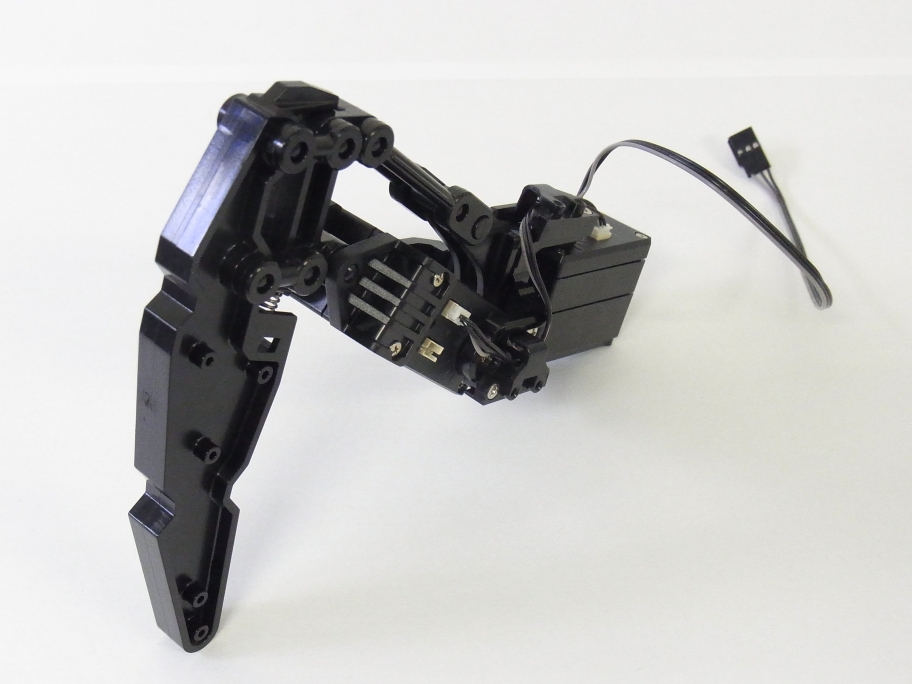
これらの製品を組み上げると以下の画像のようになります。
{kind=link}
この足のユニットをKMR-P4の前足と後足の間に組み付けることで6脚ロボットに変更することができます。足を増やすことでより安定感が増し、ペイロードも増やすことができます。バランスが取りやすくなりますので、移動モーションが作りやすくなることも利点の一つです。

詳細な組み立て方は、「多脚ロボット用レッグユニットセットtypeA」付属のマニュアルとKMR-M6用組立説明書を参考にしてください。
●KMR-M6組立説明書 ダウンロードページ
KMR-M6のサンプルモーションがそのまま使用できます。
●KMR-M6サンプルモーション ダウンロードページ
【注意事項】
組み立てる前に、追加するサーボモータのIDを必ず変更してください。KMR-M6のサンプルモーションを流用する場合は、組立説明書を参考にKMR-M6と同じようにIDを振り分けてください。
KMR-P4 Ver.1.5 リフェバッテリー付きセットの詳細をみる 多脚ロボット用レッグユニットセット typeAの詳細をみる