


HeartToHeart4
価格: 無料
<ソフトウェア動作環境>
●対応OS
Windows 8 / 8.1 /10(各64bit)
※Microsoft.NET Framework 4.6以上が必要です。
●USBポート(1.1/2.0)
<対応機種>
●RCB-4HV
●RCB-4mini
最新版ダウンロードはこちらから。
商品説明
HeartToHeart4(以下HTH4)は、ロボット用プログラミングソフトです。
モーションの作成や書き込みをはじめ、姿勢の調整、ジャイロや加速度などオプションセンサーの設定といったソフトウェアの作業をすべてカバーします。HTH4がもつたくさんの機能を使って自由に自分だけのロボットを作り上げることができます。
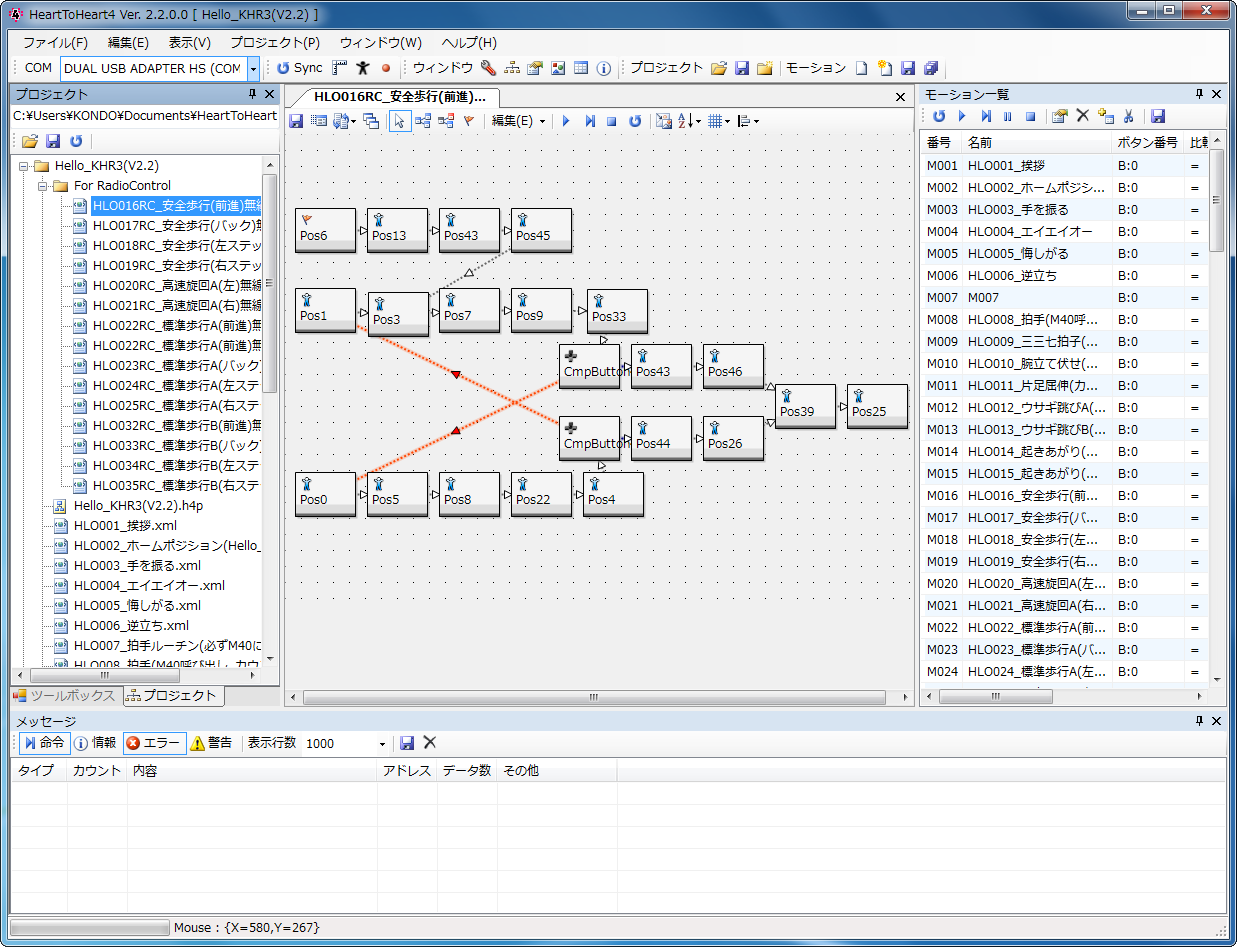
■特徴その1:マウス操作だけでモーションが作れる
難しいプログラミング言語は一切使用しません。
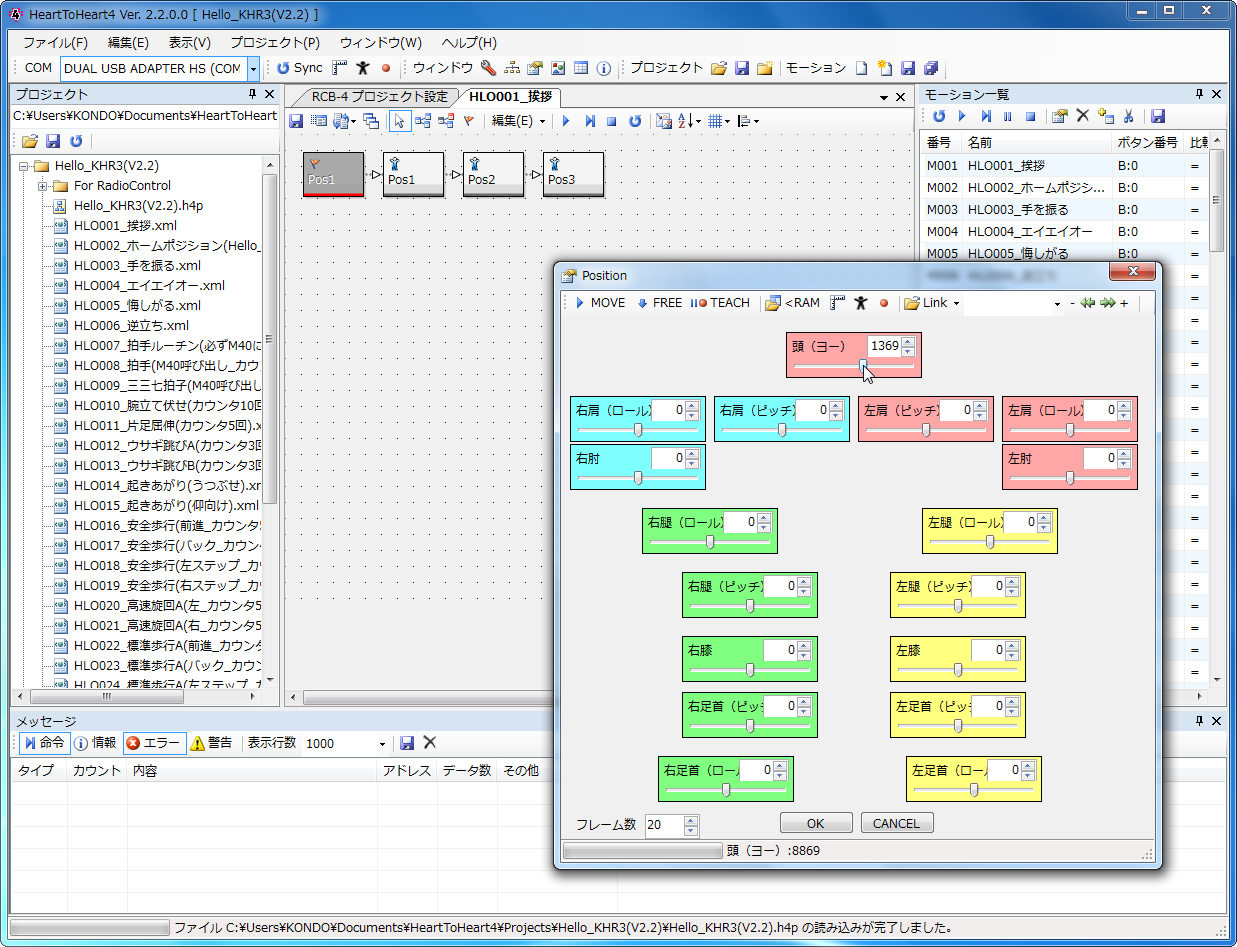
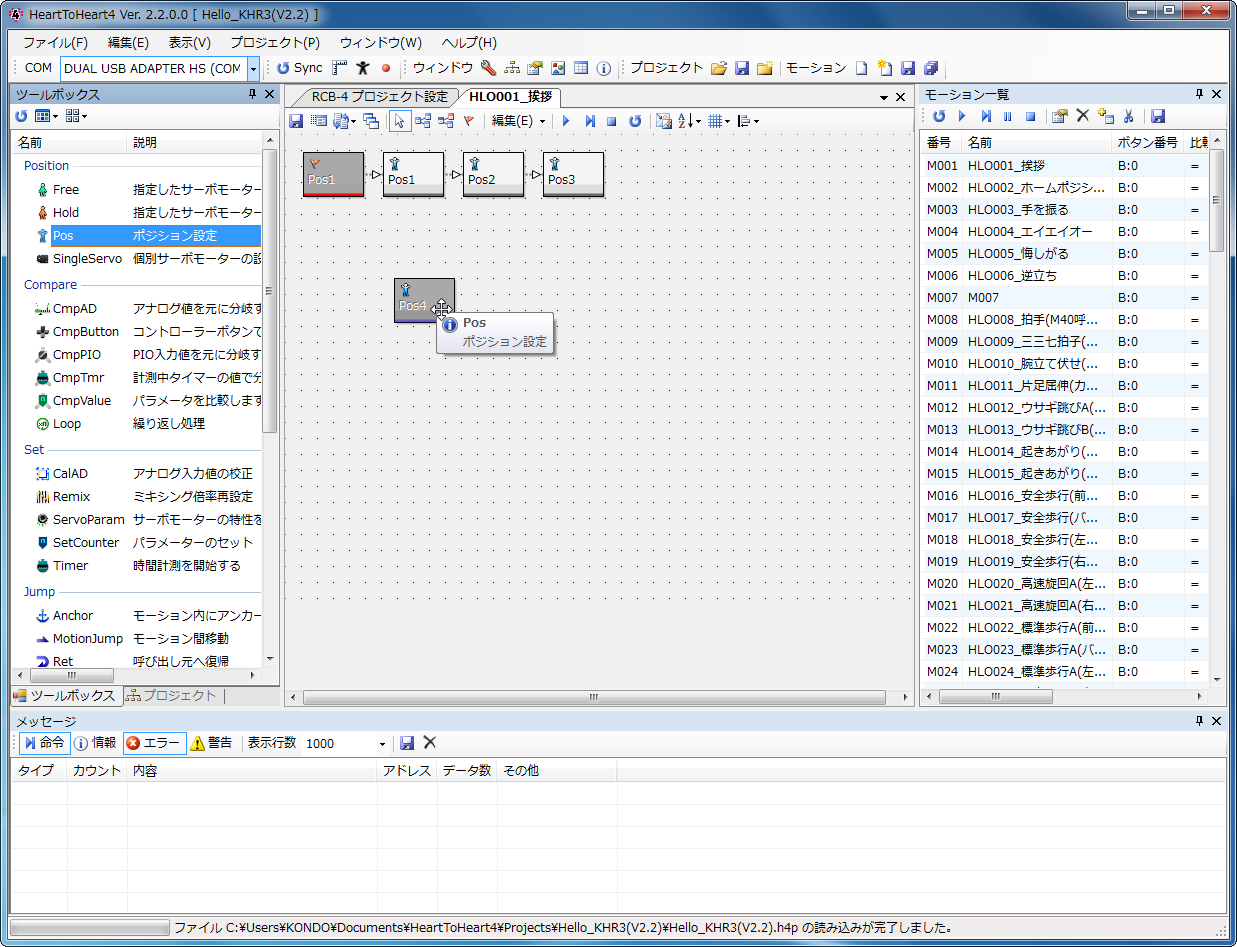
個別の機能を持ったパネルを組み合わせるだけで、モーション(ロボットの動作)を作れることがHTH4の最大の特徴です。パネルの一つひとつにポーズをつけていき、それらをつなげることで「歩行」や「挨拶」などのモーションが出来上がります。
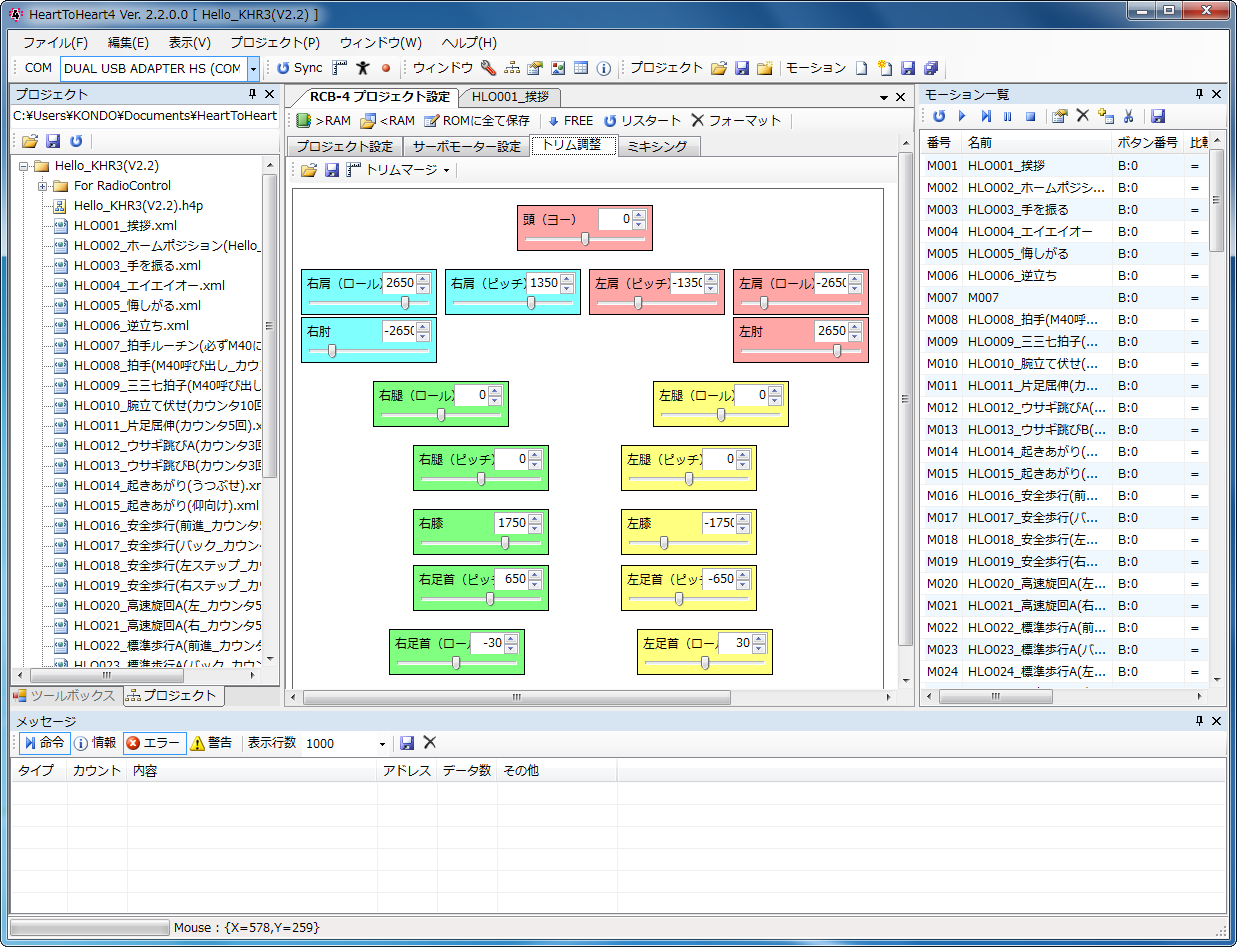
各関節の動作角度を数字で指定することもできますし、ロボットに直接ポーズを取らせてパネルに反映することもできます。
また、センサーや送信機のボタンなどのデータによってプログラムを分岐させたり、タイマーを使用して動作の長さを決めたりと、モーションを作りこむための様々な機能も備わっています。
■特徴その2:便利な一括管理機能
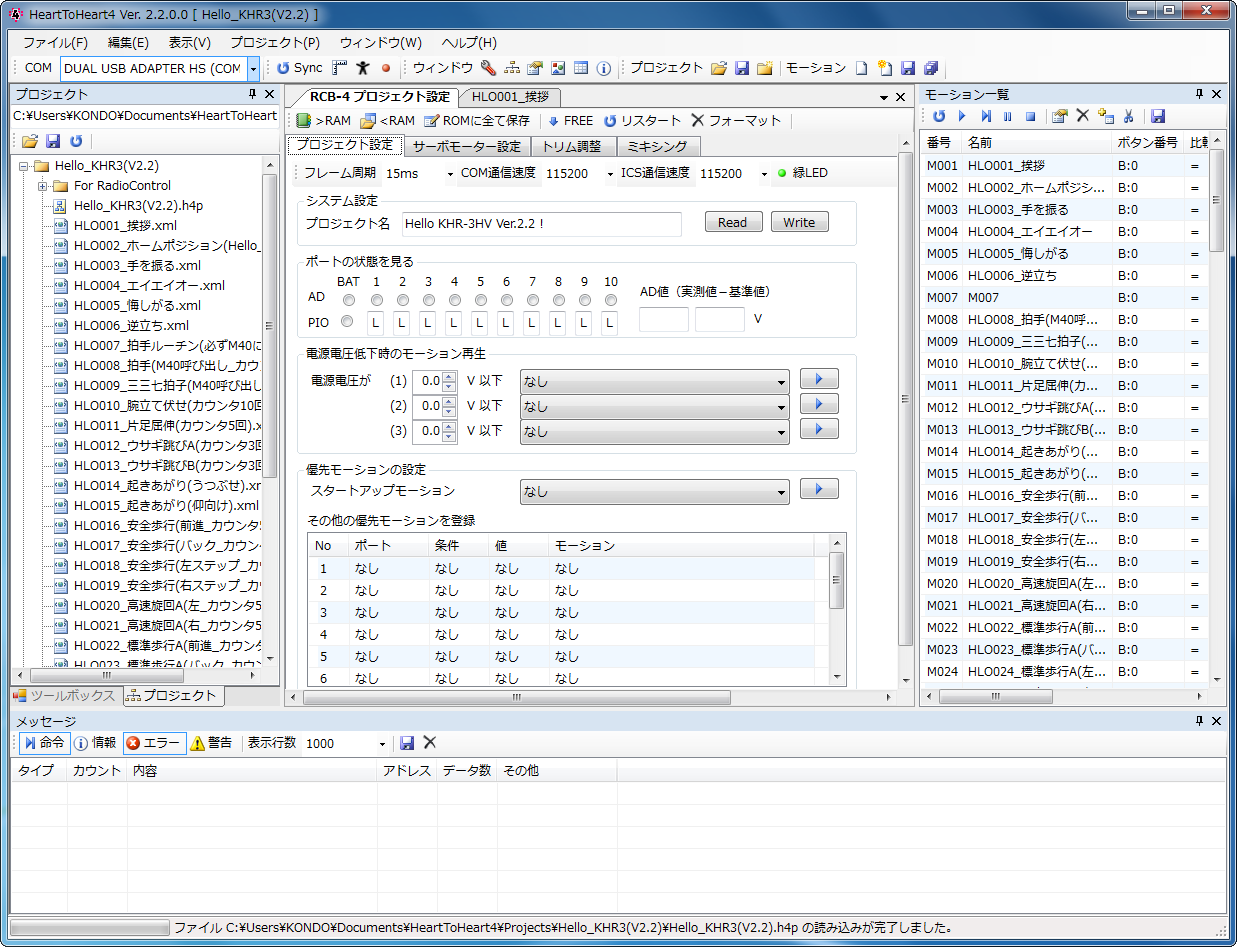
HTH4では、プロジェクトというデータ単位でロボットの情報を一括管理しています。
プロジェクトには、ロボットの関節の数やモーションデータ、送信機のボタンデータなどの情報がつまっています。「サッカーモード」や「バトルモード」など状況に合わせてプロジェクトを作成すれば、ロボット内のプロジェクトを変更するだけですぐに違った遊びをすることができます。
また、ヒト型、多脚型を問わず違う形のロボットを何台でもこのソフト一つで管理することも可能です。
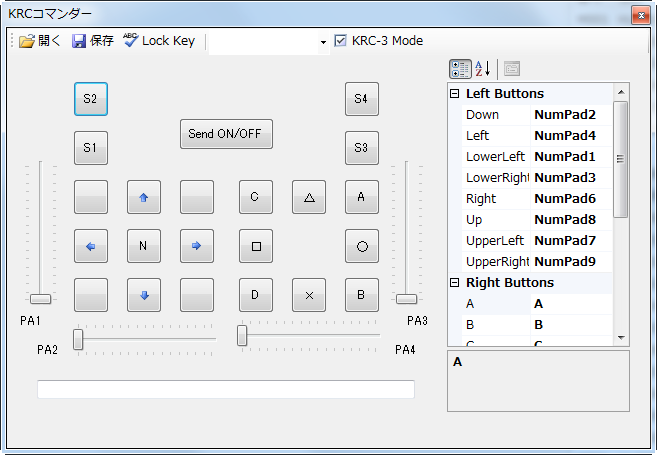
■特徴その3:出来上がったモーションを再生できます。
HTH4の機能の一つ「KRC Commander」を使えば、ロボットに書き込んだモーションを再生することができます。ケーブルが届く範囲であれば、歩行モーションでロボットを歩かせることが可能です。また、KBT-1と組み合わせれば無線の届く限り、ロボットを動かすこともできます。
HeartToHeart4の使い方を解説した特設ページを公開中です。
 『HeartToHeart4講座』
『HeartToHeart4講座』
update:2020/4/13
![]() HeartToHeart4 Software <DOWNLOAD>
HeartToHeart4 Software <DOWNLOAD>
HearttoHeart4特徴
【マウス操作だけでモーションが作れる】
難しいプログラミング言語は一切使用しません。
個別の機能を持ったパネルを組み合わせるだけで、モーション(ロボットの動作)を作れることがHTH4の最大の特徴です。
パネルの一つひとつにポーズをつけていき、それらをつなげることで「歩行」や「挨拶」などのモーションが出来上がります。
各関節の動作角度を数字で指定することもできますし、ロボットに直接ポーズを取らせてパネルに反映することもできます。
また、センサーや送信機のボタンなどのデータによってプログラムを分岐させたり、タイマーを使用して動作の長さを決めたりと、モーションを作りこむための様々な機能も備わっています。
【便利な一括管理機能】
HTH4では、プロジェクトというデータ単位でロボットの情報を一括管理しています。
プロジェクトには、ロボットの関節の数やモーションデータ、送信機のボタンデータなどの情報がつまっています。
「サッカーモード」や「バトルモード」など状況に合わせてプロジェクトを作成すれば、ロボット内のプロジェクトを変更するだけですぐに違った遊びをすることができます。
また、ヒト型、多脚型を問わず違う形のロボットを何台でもこのソフト一つで管理することも可能です。
【出来上がったモーションを再生できます。】
HTH4の機能の一つ「KRC Commander」を使えば、ロボットに書き込んだモーションを再生することができます。
ケーブルが届く範囲であれば、歩行モーションでロボットを歩かせることが可能です。
さらに、BluetoothモジュールKBT-1を搭載すれば、PCから無線操縦もできます。