HeartToHeart4講座(2-1) プロジェクトについて
今回から第二章がスタートしました。この章では、サンプルプロジェクトでロボットのモーション再生ができるまでを解説します。
HeartToHeart4のデータ管理はプロジェクト単位で行われています。HeartToHeart4を利用するうえで、プロジェクトは非常に重要ですが、少しわかりづらい部分がありますのでこの記事で解説します。
【関連記事】
第二章
HeartToHeart4講座(2-2) サンプルプロジェクトを開く
HeartToHeart4講座(2-4) モーション再生(有線、無線)
第一章、第三章については下記のページからご参照ください。
■HeartToHeart4のプロジェクトとは
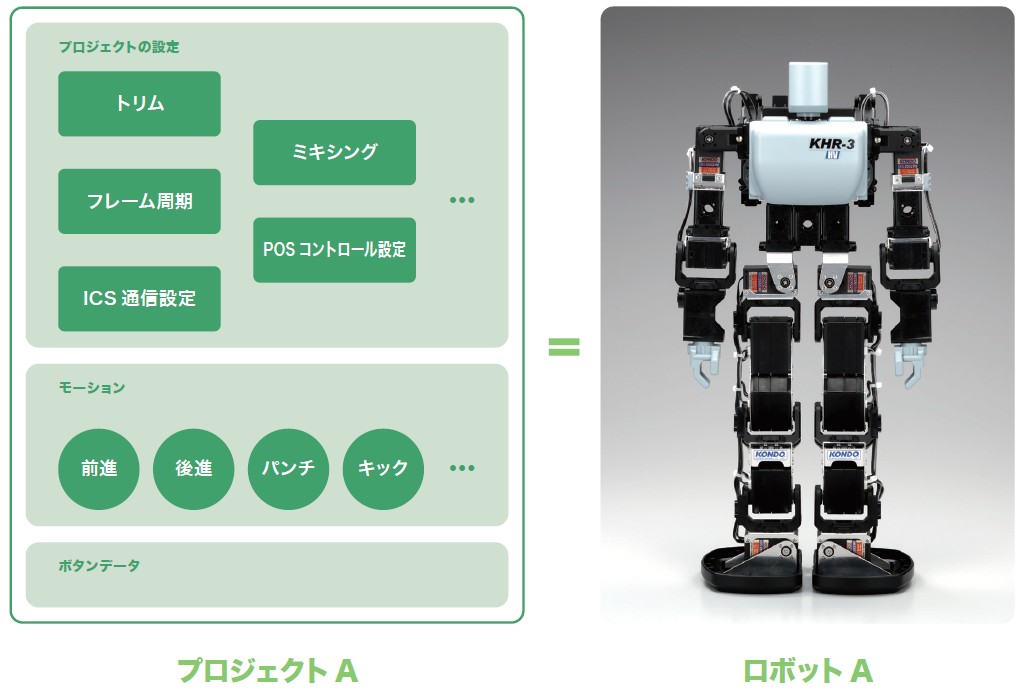
プロジェクトには、ロボットが動作するために必要な情報がひとまとめにパッケージされています。
ロボットを動かすデータと言えば、まずはモーションファイルです。モーションファイルには、動作をする際の各関節(サーボ)の角度や、動かすタイミングなどのデータ入っています。このデータを順番に再生することで、「歩行」や「挨拶」など一連の動作が実現します。
プロジェクトには、ロボット自身の情報も含まれています。関節(サーボ)が何個搭載されているか、ジャイロはどれくらいの強度で姿勢を補正するのか、などです。
二足歩行ロボットがまっすぐに安定して歩くためには、左右のバランスを均等にする必要があります。HeartToHeart4には、トリム調整機能が備わっていますので、各関節のサーボの角度を変更し、姿勢を補正することができます。姿勢を補正したトリムデータもプロジェクトの一部です。
また、無線コントローラによるボタン操作の割り当てもプロジェクトファイルの重要なデータです。どのボタンが押されたときに、どのモーションを再生するのかを予め決めておくことにより、モーションとボタンを紐づけすることで、ロボットを無線コントロールすることが可能になります。
他にも、PCとロボットの通信速度や、バッテリーの電圧が下がった時の処理など、多数のデータがプロジェクト内にあります。
下記の図がプロジェクトのイメージです。
プロジェクトは、ロボットの仕様や用途に合わせて作成します。例えば、KHR-3HVの標準17軸に対して、バトル用モーションが入ったプロジェクトとサッカー用モーションが入ったプロジェクトを用意したとします。イベントに合わせてプロジェクトを丸ごと書き換えれば、簡単にロボットの動作をチェンジすることができます。

また、KHR-3HVを17軸から22軸に換装したときも、新規のプロジェクトを作成すれば元の17軸のプロジェクトを変更することなくロボットに新しいプログラムを登録することができます。17軸のプロジェクトをインポートして新規作成すると、17軸のデータを残したまま別のプロジェクトを作成することができます。換装で追加した5軸分の関節データを追加するだけですので、手間が省けますね。
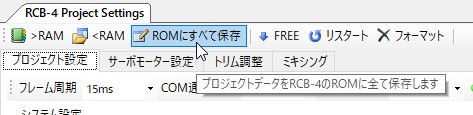
ロボットへのプロジェクトの書き込みは、非常に簡単です。HeartToHeart4には、「ROMにすべて保存」ボタンがあります。これは、HeartToHeart4で現在展開しているプロジェクトをそのまま全て書き込むボタンです。このボタン一つでプロジェクトの書き込みが完了します。
このように、プロジェクトはロボットの仕様、用途に対して用意し、書き換えることで別の動作ができるようになる便利な管理方法です。
KONDOのロボットキットは、ロボットに合わせたサンプルプロジェクトを配布しています。まずは、お手持ちのロボットに合ったプロジェクトを展開して、どのようなデータが入っているかご確認ください。
【注意事項】
ロボットからPCへプロジェクトを吸い出すことはできませんので、必要なプロジェクトはPCから削除しないようにご注意ください。
次回は、サンプルプロジェクトをHeartToHeart4上で開く方法を解説します。
次の記事
HeartToHeart4講座(2-2) サンプルプロジェクトを開く
HeartToHeart4の詳細をみる KHR-3HV Ver.3.1 リフェバッテリー付きセットの詳細をみる KHR-3HV Ver.3 リフェバッテリー付きセットの詳細をみる RCB-4HVボードのみの詳細をみる RCB-4miniの詳細をみる KHR-3HV Ver.2 リフェバッテリー付きセットの詳細をみる KXR-L2 ヒューマノイド型 Ver.2の詳細をみる KXR-L4T-R カメ型・ローバー型 Ver.2(アカデミックパック)の詳細をみる KXR-A5 アーム型 Ver.2の詳細をみる KXR アドバンスセットA Ver.2の詳細をみる KXR アドバンスセットB Ver.2の詳細をみる