
RCB-4mini
価格: ¥10,780 (税込)
<スペック>
●寸法:35×30×12mm(突起部除く)
●重量:7.6g
●電源電圧:6V~12V
●対応サーボ:シリアル専用
●通信規格:ICS3.0/3.5/3.6
●通信速度:115200/625000/1250000
●信号レベル:TTL
●ICS最大接続数:33
●接続方法:デイジーチェーン
●SIO端子:6(2系統×3口)
●AD端子:5
●PIO:0
●COMポート:1
●端子:ZHコネクタ
●対応ソフト:HeartToHeart4
<ソフトウェア動作環境>
<ソフトウェア動作環境>
●対応OS
Windows 8 / 8.1 /10(各64bit)
※Microsoft.NET Framework 4.6以上が必要です。
●USBポート(1.1/2.0)
<インターフェース>
●Dual USBアダプターHS
●シリアルUSBアダプターHS
<付属品>
●電源ケーブルA ×1
●ZH変換ケーブル ×1
ソフト・マニュアルなどはHeartToHeart4の記事からダウンロードしてご利用ください。マニュアルも同じフォルダ内に含まれています。
商品説明
■RCB-4miniの制御は簡単です!
RCB-4miniはHeartToHeart4(以下HTH4)とセットで使用します。HTH4は、モーション作成用ソフトウェアです。画面上のパネルをマウス操作するだけでほとんどの作業が完了しますので、プログラミング未経験のかたでも簡単にモーションが作成できます。
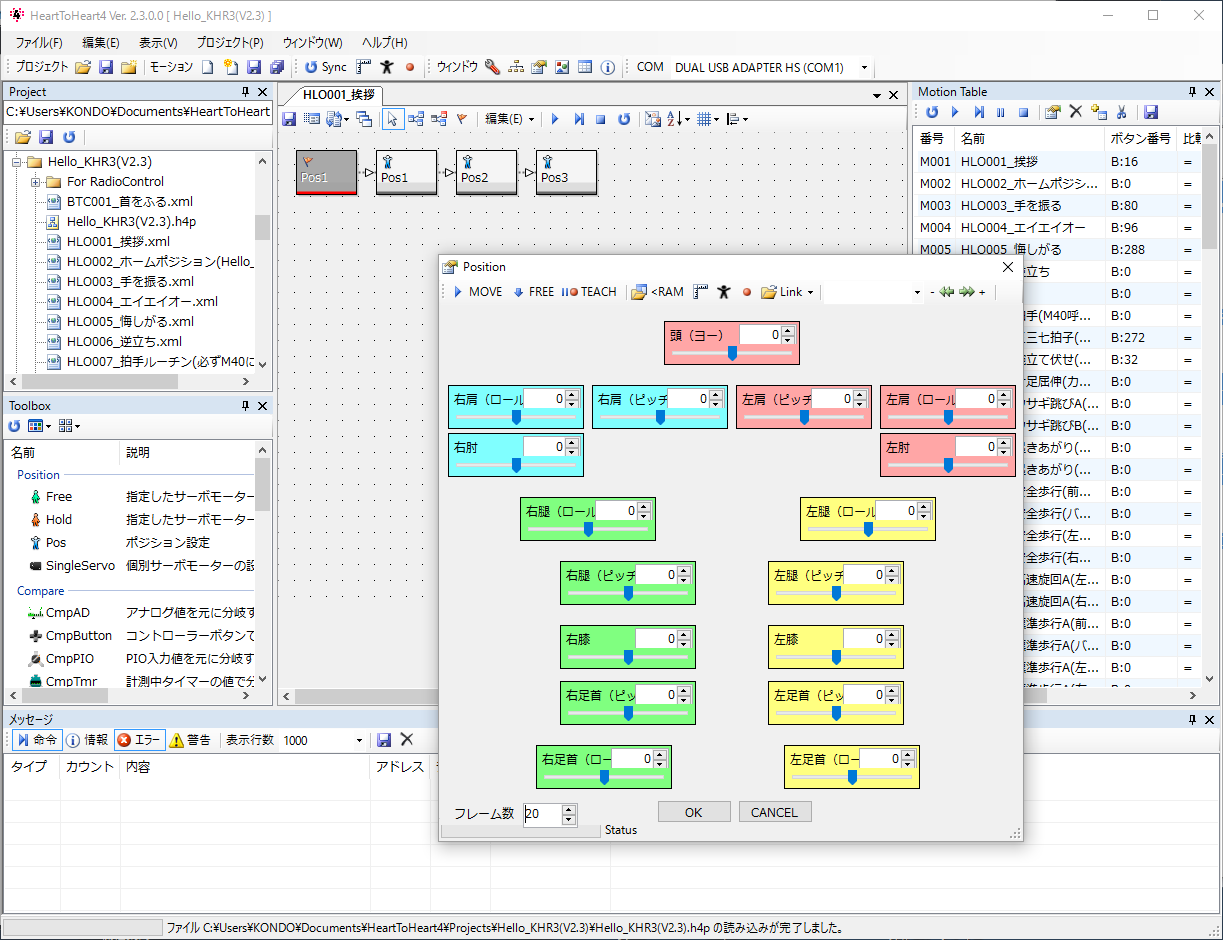
HTH4では、以下の作業ができます。
・サーボの制御
各サーボの角度を指定するだけでサーボを動かすことができます。RCB-4miniでは、最大35個のサーボを制御することが可能です。また、スピード(動作速度)、ストレッチ(軸の保持力)をモーション内で変更することもできます。
・モーション作成
指定した角度を順番に再生することでモーションとして動作させることができます。また、状況に合わせてモーションを分岐したり、繰り返し動作を数字で指定したり、他のモーションを呼び出してつなげたりと、便利な機能が豊富に用意されています。
・センサーの制御
センサーの値を読み込み、その値を元にモーションの分岐や、角度を変えることができます。
例えば、二足歩行ロボットにジャイロセンサーを搭載して、姿勢が崩れた時に足首やひざのサーボの角度を少しずらして姿勢を保つ、などの制御を行えます。
・サーボ以外のICSデバイスの接続
ICS対応の受信機(KRR-5FHなど)をつないでロボットを無線化することもできます。
他にもロボットのモーション作成に必要な機能がたくさんあります!
HeartToHeart4の詳細はこちらをご覧ください。
■RCB-4miniの特徴
・ICS3.0/3.5/3.6対応シリアル専用のロボット用コントロールボードです。サーボ単体の制御からロボットを制御するためのメインボードとして使用できます。
・コンパクトなボードデザインで、小型サーボで組んだロボットに無理なく組み込めます。
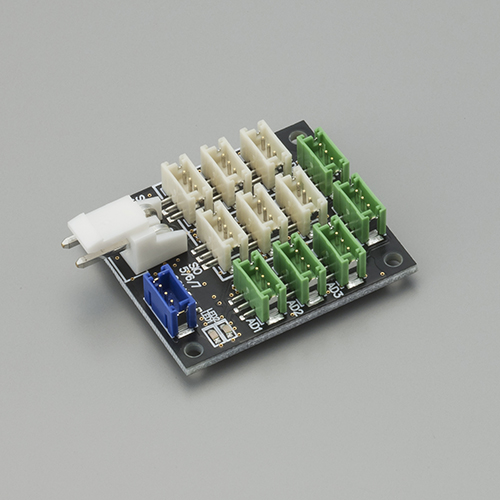
・端子の色を機能別に分けました。
白 = SIO端子 サーボや受信機などICSデバイスを接続する端子です。
緑 = AD端子 ジャイロや加速度センサーなどを接続するセンサー用の端子です。
青 = COM端子 PCと通信するための端子です。
Dual USBアダプターを中継して通信します。
・2系統のICS3.x対応デバイス用シリアルポート6ポートを用意。マルチドロップ接続をすることで最大36個のICS3.xデバイスを接続可能。(サーボは35個、受信機が1個で合計36個接続できます)
・アナログ端子が5ポートありますので、ジャイロや加速度センサーなどを接続可能。ADポートとは別に電源管理用ADポートも用意。
・COMポートは最大1.25Mbpsの高速通信を実現。
※ICS3.0/3.5/3.6のすべてに対応する際は、「ICS3.x」と表記する場合があります。
■対応サーボ
KRS-3304 ICS
KRS-3301 ICS
KRS-3204 ICS ※
KRS-2552RHV ICS ※
KRS-2542HV ICS ※
【ご注意ください】
※KRS-6000/4000シリーズ、及びKRS-2572HVなど出力の高いサーボには対応していません。6000/4000、2572をご利用の際はRCB-4HVをご利用ください。
※KRS-3204を直接接続する場合は、コネクタをZHに変換する必要があります。ZH変換ケーブルをご利用ください。
※KRS-2552RHV/2542はHV対応(9~12V)のサーボです。KRS-3300/3200シリーズと混在できませんのでご注意ください。
■制御方法
●PCから制御する
RCB-4は、HeartToHeart4を使用して簡単にモーション作成が可能です。
・製品情報:『HeartToHeart4』
また、公開されている「RCB-4リファレンスセット」を参照して独自の環境から命令を送ることができます。(RCB-4にHTH4を使用してプロジェクトが書き込まれている必要があります)※
・サポート情報:『RCB-4リファレンスセット Ver.2.2』
【必要な製品】
・Dual USBアダプターHS
(USBアダプター同梱のケーブルでPCと接続可能です)
・HV電源スイッチハーネス、またはLV電源スイッチハーネス
(接続するサーボの電圧に合わせてご用意ください。ロボットに搭載されている場合は、追加でご用意いただく必要はありません。)
●マイコンボードから制御する
市販ボードのUART端子からRCB-4を制御することができます。RCB-4変換基板を経由することでマイコンボードとRCB-4を簡単に接続することができます。通信方法、コマンドについては『RCB-4リファレンスセット Ver.2.2』をご参照ください。(RCB-4にHTH4を使用してプロジェクトが書き込まれている必要があります)※
【必要な製品】
※Arduino UNOで使用する場合
・KSBシールド2 ×1

Arduino用のライブラリを公開しました。下記よりダウンロードしてご利用ください。
『RCB-4 Library for Arduino ver.1』
★Arduinoライブラリの詳細な使用方法はこちらの記事をご覧ください。
※RCB-4内部のファームを変更することはできません。RCB-4に登録したモーション再生やセンサの情報を取得することができます。
RCB-4に関する情報は、こちらからご覧いただけます。

