RCB-4変換基板の使用方法(1) 準備編
RCB-4変換基板は、マイコンボードなどに搭載されているUART端子、またはI/O端子のソフトウェアシリアルを使用して弊社ロボットキットに搭載しているコントロールボードRCB-4(HV/mini)と通信するための変換基板です。
従来は、RCB-4とマイコンボードを中継する回路を作成する必要がありましたが、この基板を使用することで簡単に制御することができるようになります。
●RCB-4とは
RCB-4は、KRSサーボを制御するためのコントロールボードです。モーション作成ソフトHeartToHeart4を使用してモーションを作成しRCB-4に登録することで、手軽にロボットを制御することが可能です。プログラミング言語を使用することなくモーションを作成できますので、初心者でも使用できますし、HeartToHeart4の多彩な機能を活用してハイエンドユーザーにも対応します。
RCB-4HVとRCB-4miniがありますが、違いはAD端子、PUO端子の実装数と基板サイズのみです。同じHeartToHeart4でプログラミングができます。
●RCB-4とマイコンボードを組み合わせるメリット
ICS変換基板を使用してマイコンボードから直接KRSサーボを制御し、ロボットを動作させることが可能ですが、ヒューマノイド型やカメ型、6脚型など歩行して移動するロボットの動作を作成する場合は、複雑な制御を行う必要があります。また、モーションを再現する場合でも複数行にわたって各ポーズのポジションデータを送信するプログラムを用意する必要がありますので手間がかかります。
そこで、RCB-4と組み合わせることによりマイコンボードからRCB-4に登録されたモーションを再生することで、「動作に関わる処理はRCB-4」に任せ、「センサや状況判断などをマイコンボード」が行うような切り分けた処理でプログラムを簡潔に済ますことが可能になります。
また、RCB-4はモーション作成ソフトHeartToHeart4に対応していますので、GUIによるプログラミングで簡単にモーションを作成することができます。バリエーションに富んだ動作を用意することができ、表情豊かにロボットを動かすことが可能になります。
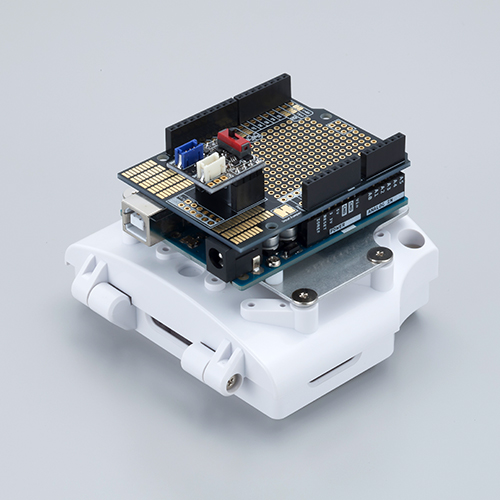
今回は、RCB-4変換基板の使用方法の例として、この変換基板とシールド、さらにKXR-L4Tカメ型ロボットを組み合わせ、Arduino UNOでロボットを制御する方法をご紹介します。
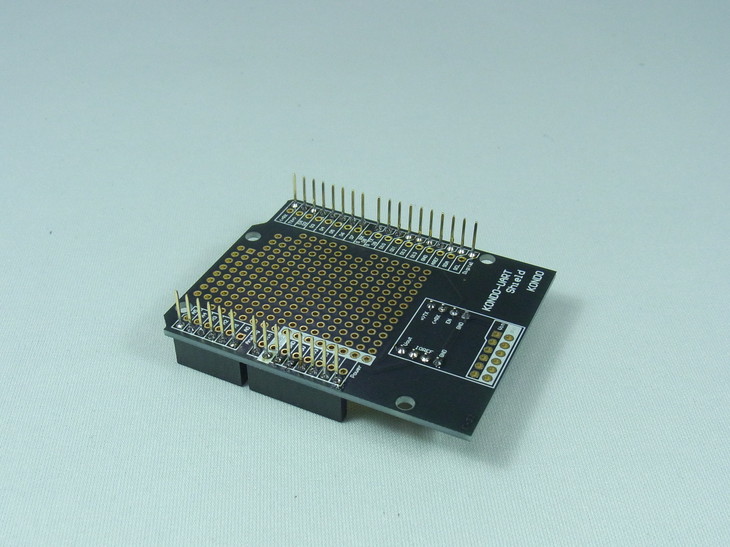
■RCB-4変換基板について
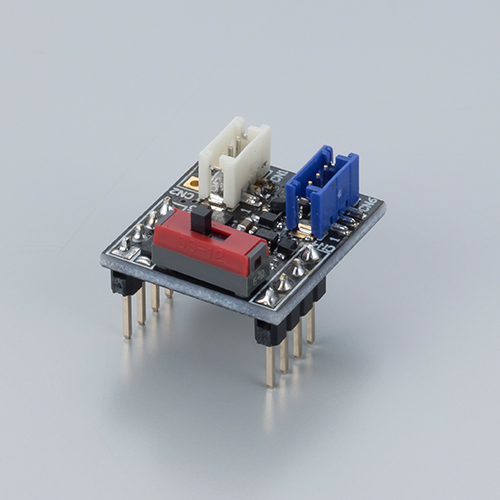
RCB-4変換基板 ¥2,600(税別)
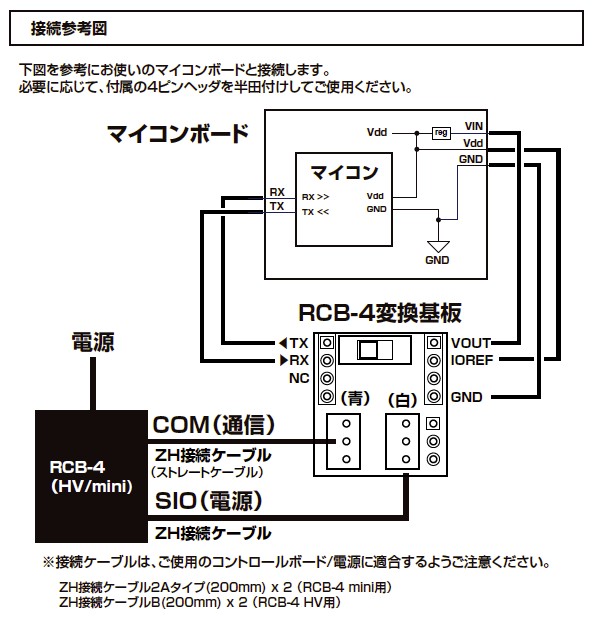
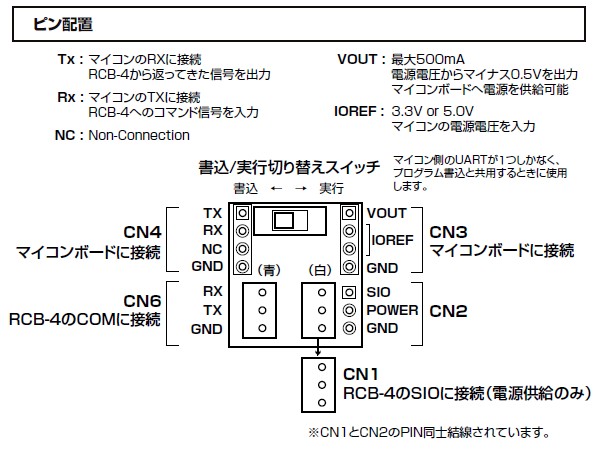
RCB-4変換基板上の端子は、マイコンボードと通信するための端子と、RCB-4と通信するための端子とが分かれて実装されています。
RCB-4に接続する端子は、わかりやすいように青のZHコネクタを採用しました。
マイコンボードに対しては、各端子にそのまま配線するだけですので非常に簡単です。また、マイコンボードとしてArduino UNOを使用する場合は、シールド基板を使用することで配線の手間も省くことができます。
RCB-4変換基板上のスイッチは、マイコンボードがUARTを他の機能と併用して使用している場合に、サーボの通信とマイコンボードの通信が混信しないための切り替え用に用意しています。「書込」の状態では、RCB-4とマイコンボードの接続が切れた状態になりますので、マイコンボードに合わせて必要な場合はご利用ください。
マイコンボード上にUARTが複数あり、端子がRCB-4との通信専用になっている場合は、「実行」のまま切り替えは不要です。
■シールドについて
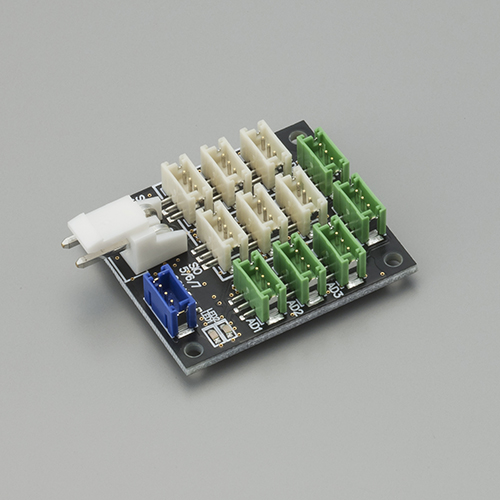
KSBシールド2 ¥1,200(税別)
ICS変換基板、RCB-4変換基板をArduino UNOで使用するためのシールド基板です。各端子を配線する手間なくご利用できます。ユニバーサルのフリーエリアや面実装用にフリーのパットも用意しましたので、自作回路を搭載することも可能です。HardwareSerialとSoftwareSerialに対応しています。
■用意するもの
・KXR用オプションボード搭載セットC
こちらのセットにRCB-4変換基板、KSBシールド2が付属しています。
・Arduino UNO+USBケーブル
KXR-R4LL ローバーLL型やKXR-L6 6脚型でも可能です。
※RCB-4を搭載している搭載ロボットにご利用できます。
ただし、「KXR用オプションボード搭載セットC」に付属している板金は
KXRシリーズのバックパックのみ対応しています。
RCB-4HV、RCB-4miniのどちらでも通信可能です。同じライブラリで制御できます。
・ACアダプター(6V2A)
ロボットに搭載しているサーボの電圧に合わせてご用意ください。
電源は、キット付属のバッテリでも可能です。
・Dual USBアダプターHS
ロボットキットに付属しています。
モーションの登録やトリム調整などロボットとの通信に使用します。
・はんだごて
※ケーブル、ビス類は、搭載セットに付属していますので別途ご用意する必要はありません。
■準備
1)基板のはんだ付け
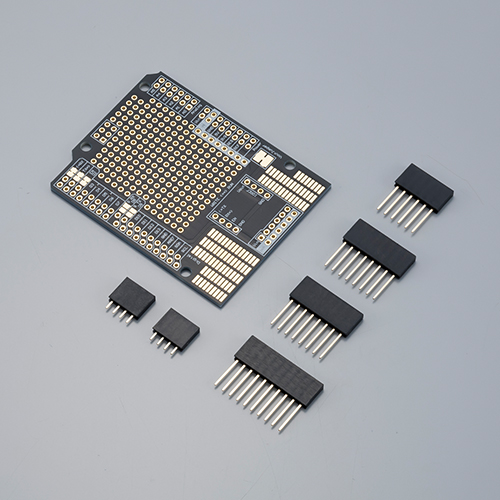
RCB-4変換基板、及びシールドは、ご購入時は端子がついていませんので、付属のヘッダピンをはんだ付けする必要があります。

●KSBシールド2をSoftwareSerialで使用する場合
KSBシールド2は、デフォルトでHardwareSerialに接続されています。SoftwareSerlaiで使用するためには下記の作業が必要です。
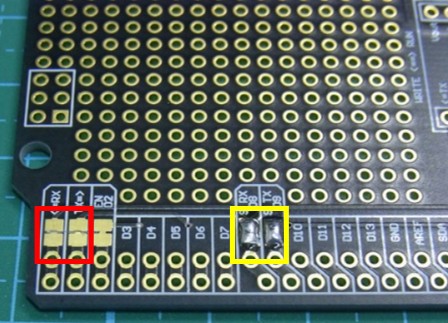
画像のように、赤枠のRX、TX端子のパターンの細い部分をカッターなどでカットし、黄色枠のS_RX(D8)、S_TX(D9)端子のパターンをはんだで接続します。EN(D2)はカットしませんのでご注意ください。
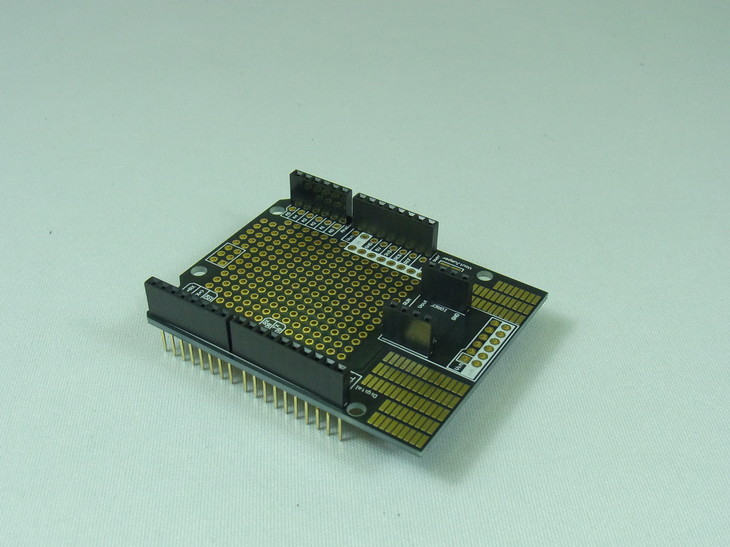
はんだ付けが完了したらRCB-4変換基板をKSBシールド2に接続します。
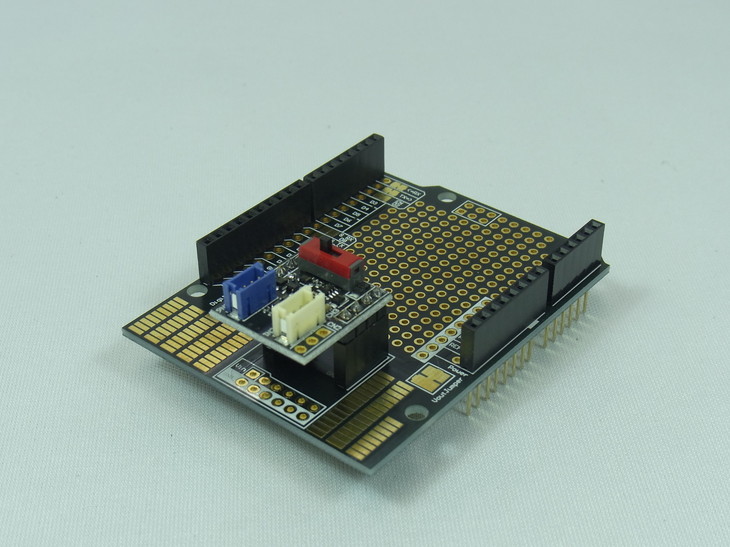
以上でRCB-4変換基板とKSBシールド2の準備が整いました。次の記事では、KXRのバックバックに搭載する方法と、ソフトウェアの準備をご紹介します。
KHR-3HV Ver.3.1 リフェバッテリー付きセットの詳細をみる KHR-3HV Ver.3 リフェバッテリー付きセットの詳細をみる KMR-M6 Ver.3 リフェバッテリー付きセットの詳細をみる KHR-3HV Ver.2 リフェバッテリー付きセットの詳細をみる KXR-L2 ヒューマノイド型 Ver.2の詳細をみる KXR-L4T-R カメ型・ローバー型 Ver.2(アカデミックパック)の詳細をみる KXR-A5 アーム型 Ver.2の詳細をみる KXR アドバンスセットA Ver.2の詳細をみる RCB-4変換基板の詳細をみる KSBシールド2の詳細をみる KXR用オプションボード搭載セットCの詳細をみる KXR-L4T-R カメ型・ローバー型の詳細をみる KXR アドバンスセットAの詳細をみる KXR-A5 アーム型の詳細をみる KXR アドバンスセットBの詳細をみる