



KMR-M6 Ver.3 リフェバッテリー付きセット
価格: オープン
生産終了品
<キット内容>
・軽量アルミ合金フレーム(アルマイト処理済み)
・樹脂成形脚部パーツ
・強化樹脂型サーボアーム
・コントロールボードRCB-4HV
・サーボモーター KRS-2552R2HV ICS ×12
・ROBOパワーセルF3-850タイプ(Life)
・充電器BX-20LF
・Dual USBアダプターHS
・その他パーツ
<ソフトウェア動作環境>
・対応OS/Windows 8.1 10
※使用する.NETのシステム要件を満たすこと。
・USBポート(1.1/2.0)
<完成時サイズ>
182(H)×335(W)×223(D)(ニュートラル時)
<重量>
約1070g(バッテリー含む)
【ダウンロード資料】
組立説明書、各種ソフトウェアはこちらからダウンロードしてご利用ください。

Made in Japan
商品説明

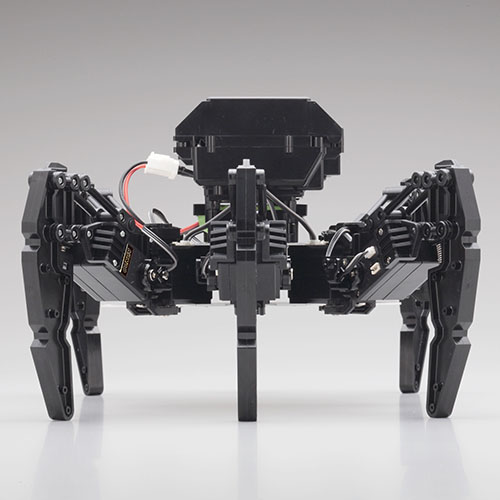
KMR-M6は、リンク式脚部パーツを採用した6足歩行ロボットです。6点で本体を支えているため非常にバランスが良く、多少の傾斜道や不整地を歩行することができます。モーション作りやメンテナンスには付属の便利で初心者でも使いやすいHeartToHeart4を使用します。
HeartToHEart4に関しましてはこちらをご覧下さい。
6脚仕様で安定性抜群
 6脚仕様のロボットは2足歩行ロボットに比べて様々な場所を移動することが可能です。 多少の段差や、路面のグリップなど今まで越えることが難しかった場所をKMR-M6は歩行していきます。
6脚仕様のロボットは2足歩行ロボットに比べて様々な場所を移動することが可能です。 多少の段差や、路面のグリップなど今まで越えることが難しかった場所をKMR-M6は歩行していきます。
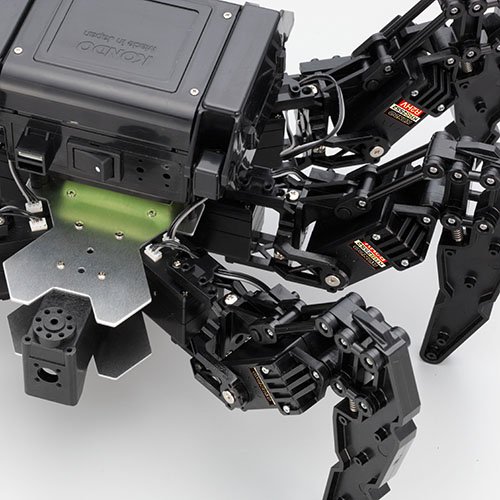
軽くて丈夫+脚部に緩衝機構を装備
 耐衝撃性に優れる軽量な樹脂パーツを採用することで全体の重量が軽くなりました。 さらに脚部パーツの内部にはスプリングが内蔵されているため衝撃を緩和し、軽快で自在な動きを実現します。
耐衝撃性に優れる軽量な樹脂パーツを採用することで全体の重量が軽くなりました。 さらに脚部パーツの内部にはスプリングが内蔵されているため衝撃を緩和し、軽快で自在な動きを実現します。
リンク式脚部と強力サーボを採用
 リンク機構により、少ないサーボ数で自由な動きを実現。さらにKHR-3HV Ver.3と同じKRS-2552R2HVサーボの採用で、力強く素早いモーション実行が可能です。
リンク機構により、少ないサーボ数で自由な動きを実現。さらにKHR-3HV Ver.3と同じKRS-2552R2HVサーボの採用で、力強く素早いモーション実行が可能です。
胴体部分の拡張も可能
 ダミーヘッドを別売りのKRS-2500シリーズのサーボに交換すれば、頭部を動かすことも可能です。
ダミーヘッドを別売りのKRS-2500シリーズのサーボに交換すれば、頭部を動かすことも可能です。
完全シリアル対応のRCB-4HVボードを採用
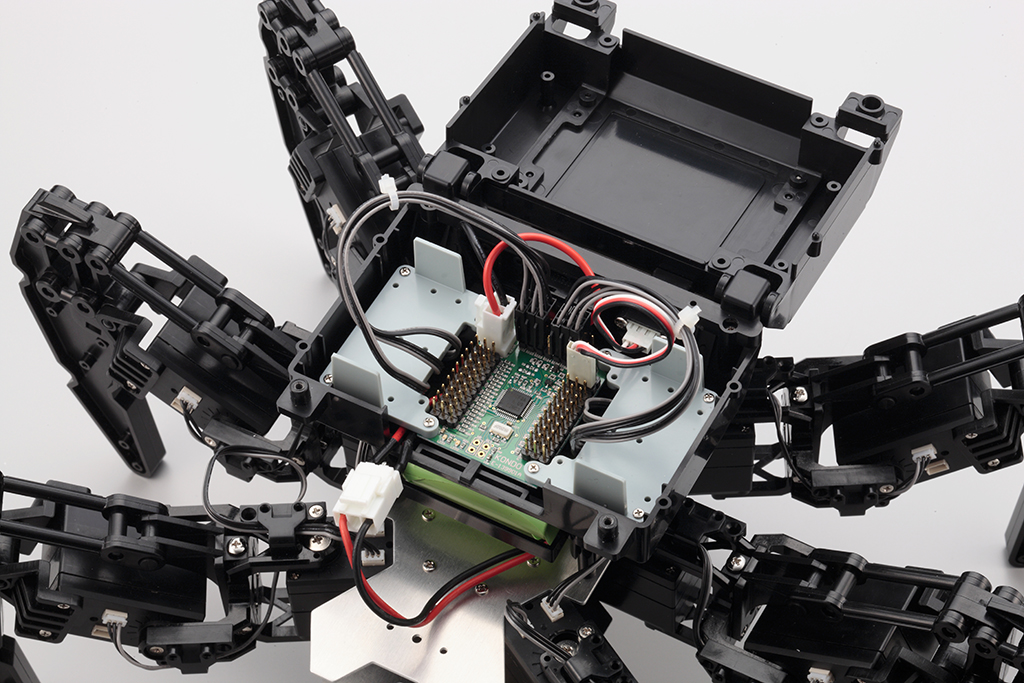 KHRシリーズの実績と信頼を継承するコントロールボードには アナログ端子を10個、デジタルI/Oを10個装備。 さらに、ICS 3.5/3.6対応モジュールを制御可能です。
KHRシリーズの実績と信頼を継承するコントロールボードには アナログ端子を10個、デジタルI/Oを10個装備。 さらに、ICS 3.5/3.6対応モジュールを制御可能です。
HeartToHeart4ならではの直感的モーション作り
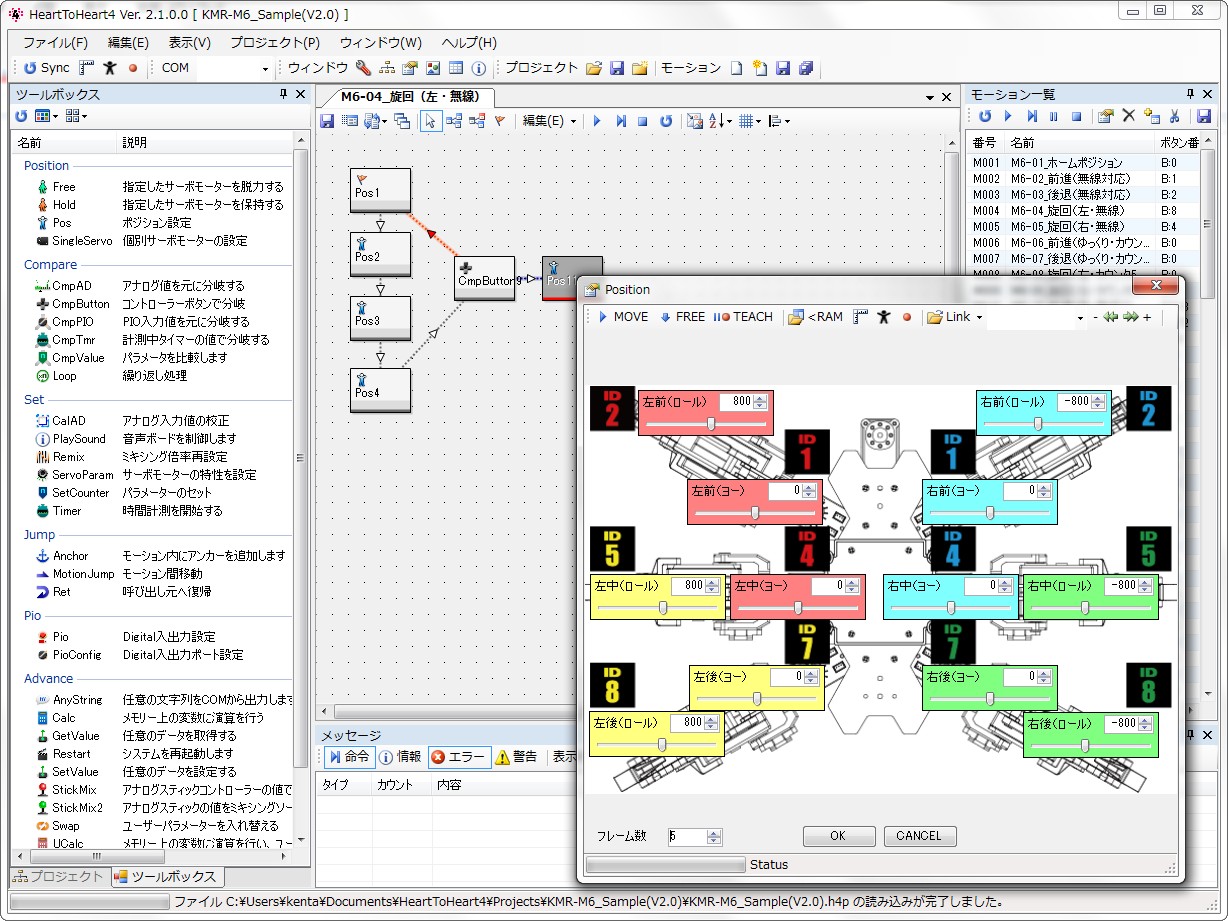 グラフィカルで使い易いモーション作成ソフトにより、 入門者からエキスパートまで幅広くカバー。教示機能も活用可能。
グラフィカルで使い易いモーション作成ソフトにより、 入門者からエキスパートまで幅広くカバー。教示機能も活用可能。
モーション作りから、書き込み、データの管理などマウス操作だけでほとんどの作業ができます。詳しくはこちら
※画像のロボットはROBOパワーセルDタイプ(ニッケル水素(Ni-MH))を搭載していますが、本セットにはROBOパワーセルF3-850(リチウムフェライト(Li-Fe))が付属します。

<Ver.3への変更点>
【サーボが進化しました!】

従来はICS3.5のサーボモーターを使用していましたが Ver.3よりICS3.6対応のKRS-2552R2HVに変更になりました。 ICS3.6では、現在値を取得するためのコマンドが追加されています。
ICS3.5の詳しい機能はこちらのサポートページ『ICS3.6と3.5の違いと新機能についての紹介』をご覧下さい。
サーボ通信速度初期値:115200bps
・RCB4+HTH4を使用する場合
ICSバージョンをアップしましたが、サーボに互換性があるためKMR-M6 Ver.2以前のモーション等々はそのまま使用できます。
・市販マイコンボードを使用し、ロボットを自前のプログラムで動かす場合
ICS3.6になり、ポジションコマンドを使わずに角度が取得できるようになったため、任意のタイミングで角度が取得できるようになりました。動作中に角度を取得できることで、現在の姿勢をより正確に取得しやすくなりました。
【柔らかくて丈夫なブラックサーボリードに変更】
新規にブラックサーボリードを採用。柔らかい素材になりましたので、ロボットの稼働を邪魔しにくく、繰り返し動作による断線が起こりにくくなりました。
関連するオプション
-

KRS-2552R2HV ICS
コード: 03197 オープン生産を終了しました。KRS-2552R3HV ICSをご利用ください。
-

KRC-5FH 送受信機セット
コード: 03099 ¥15,950 (税込)KRC-5FHはロボット用無線コントローラです。各ボタンを押すことで、そこに割り当てられたモーションを再生することができます。小型で使いやすく、操縦に便利な機能も多数備えています。
-

KRR-5FH 受信機のみ
コード: 03106 ¥8,250 (税込)KRC-5FH専用の受信機です。KHRシリーズやKMRシリーズのバックパックにぴったり収まるサイズ。2台目、3台目のロボット用にお勧めです。
-
多脚ロボット用ボディーフレーム typeA
コード: 02107 ¥2,200 (税込)KMR-M6で使用しているボディーフレームです。補修用などにおすすめ。
-

多脚ロボット用レッグユニットセット typeA
コード: 02106 ¥1,650 (税込)KMR-M6に採用されている脚部ユニットのオプションセットです。1脚分がセットになっていますので、自分でボディーを設計すればオリジナルの多脚ロボットが作成可能です。