RCB-4変換基板の使用方法(2) 搭載編
【ここまでの関連記事】
KXR用オプションボード搭載セットCを使用することで、KXRのバックパックにArduino UNOを搭載することが可能です。
今回は、KXRへの搭載方法とソフトウェアの準備についてご紹介します。
※以下の画像はArduino UNO R3を例にしていますが、Arduino UNO R4も同様の方法で搭載できます。
■搭載方法
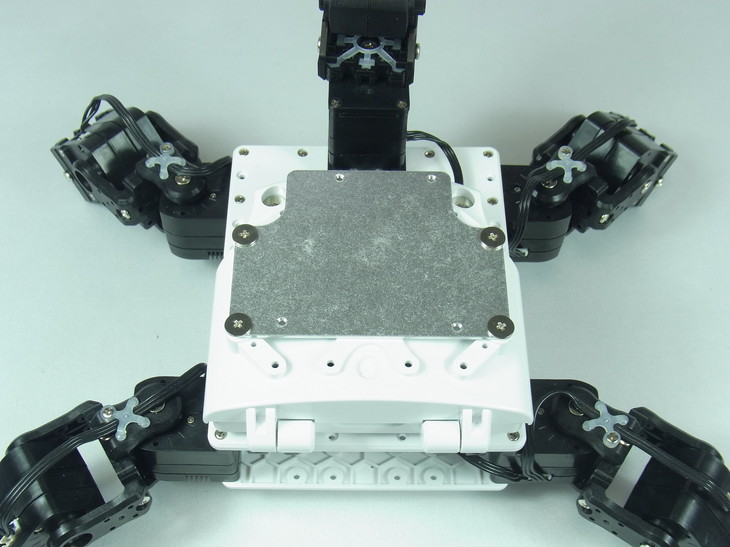
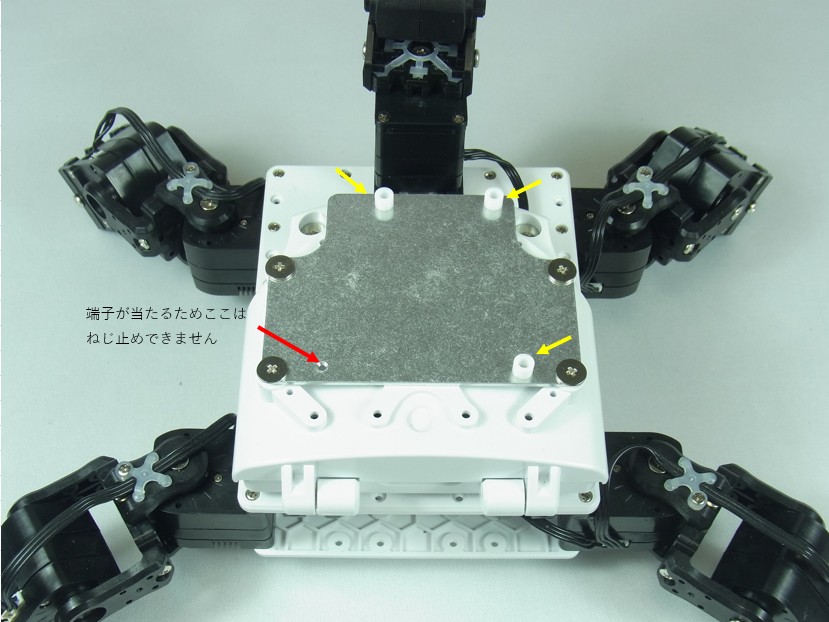
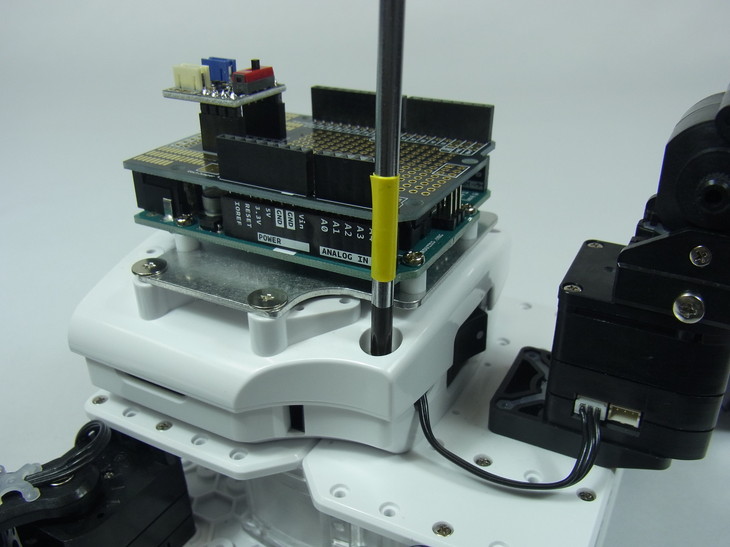
1)バックパックに2.6-4フラットヘッドビスで板金を固定します。

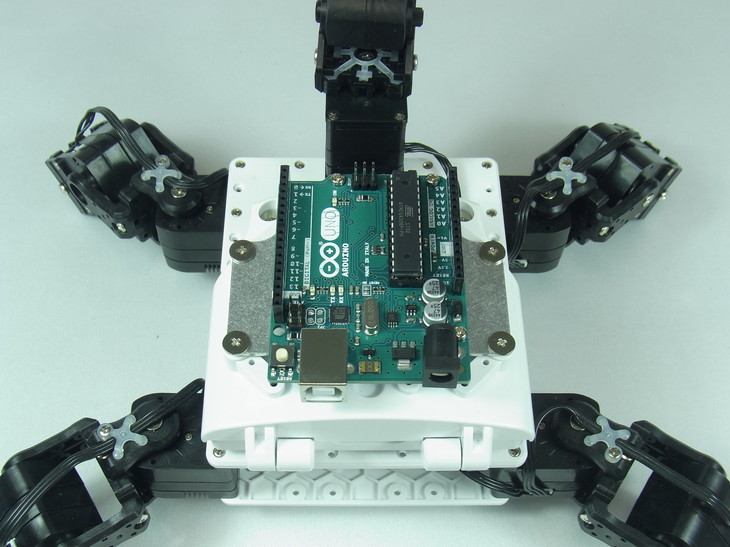
2)Arduino UNOをスペーサーを挟んでM2.6-8ビスで板金に固定します。
3)Arduino UNOにRCB-4変換基板を接続したKSBシールド2を接続します。
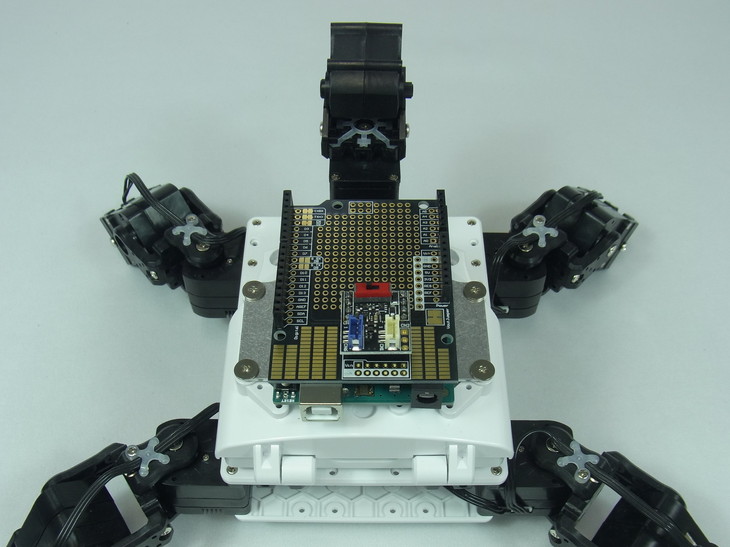
※写真は各基板にピンヘッダーを半田付けした状態です。詳細は前回の記事をご参照ください。
4)バックパックの開閉を固定している2.6-4ビスを外し、バックパックを開きます。
5)RCB-4miniのCOMに接続しているZH変換ケーブルを外し、セット付属のZH接続ケーブル2を接続します。
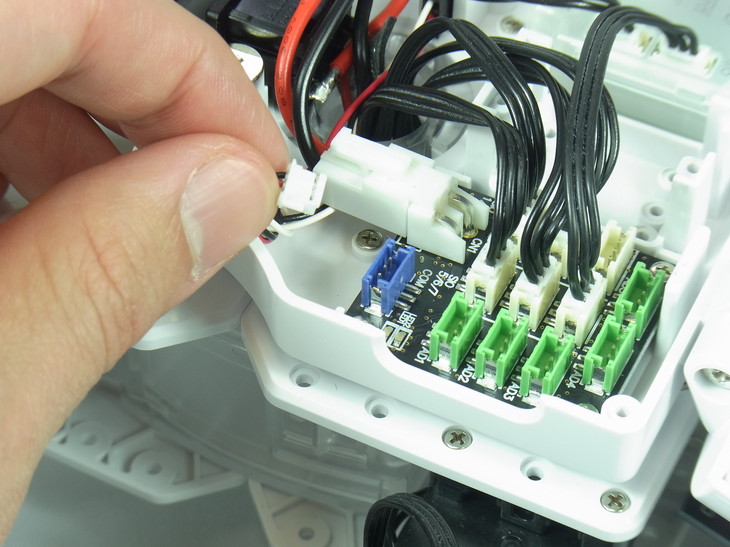
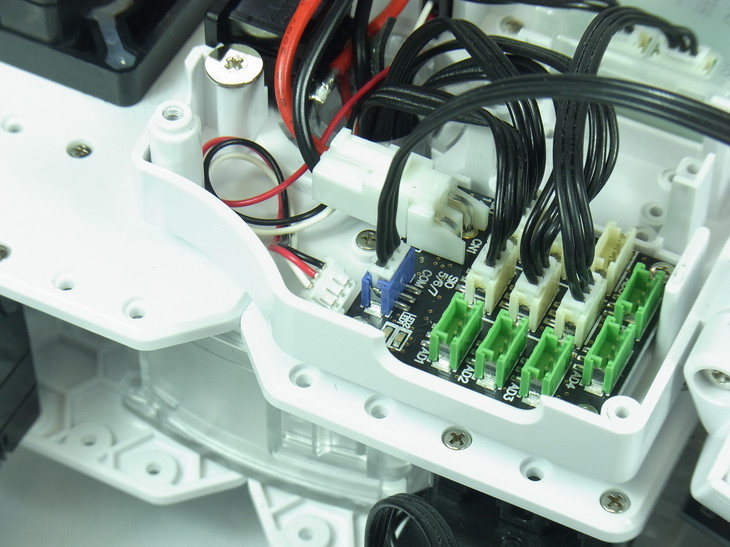
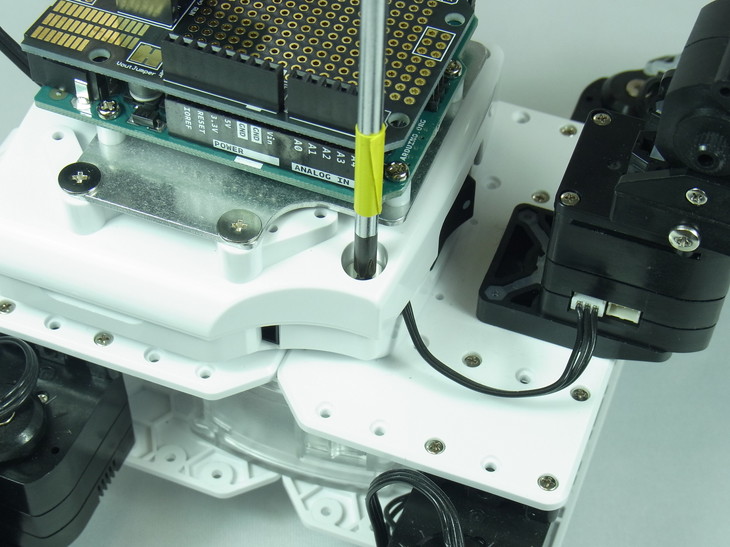
6)RCB-4miniの空いているSIO端子にもう一本の付属しているZH接続ケーブル2を接続します。COMのケーブルと識別しやすいように、このケーブルの反対側の端子付近にマスキングテープで印をつけました。
RCB-4変換基板とArduino UNOは、このSIO端子から電源を供給します。

7)ケーブルをバックパックカバーの隙間に通してふたを閉じます。ケーブルが噛まないように注意してください。

8)RCB-4変換基板の各端子に配線します。COMにつながっているケーブルは青の端子に、SIOにつながっているケーブルは、白い端子に接続してください。

7)最後にバックパックの開閉を2.6-4ビスで固定して完了です!
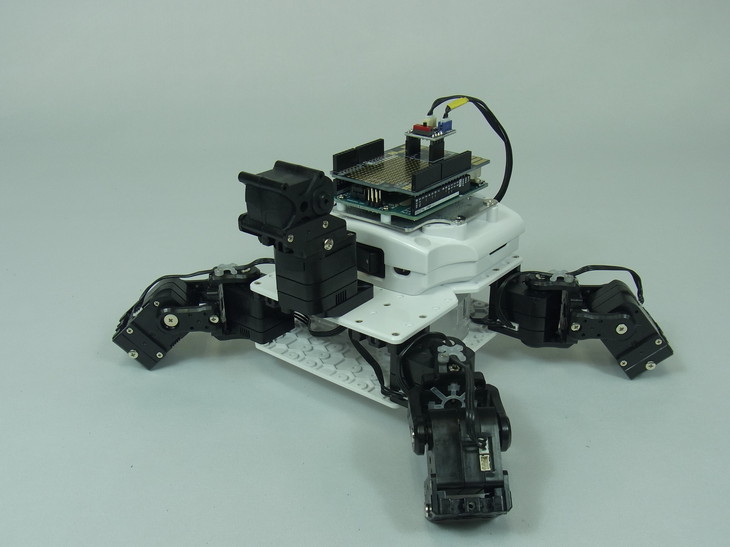
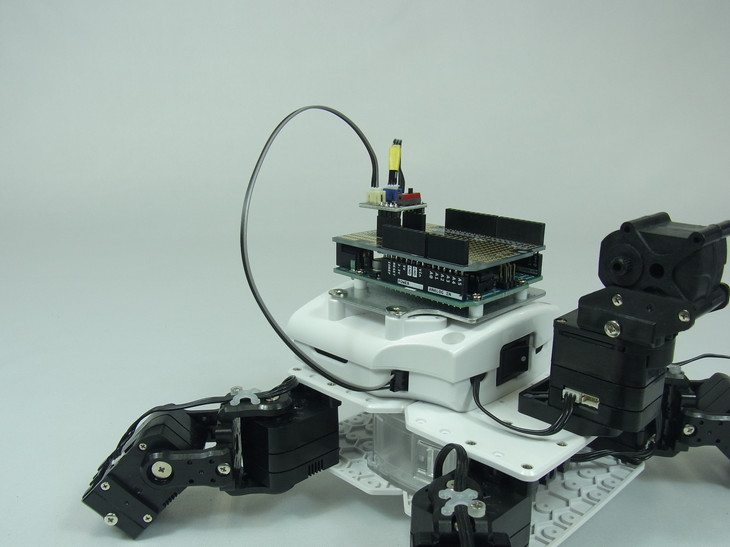
完成するとこのようになります。
【COMの配線について】
ロボットキットでは、バックパックを開閉する手間を省くために延長ケーブルを使用してバックパック外の口につながっています。上記の方法は、RCB-4のCOMに直接ケーブルを繋ぎましたが、バックパックの口にケーブルを接続することにより、ロボットのプログラムを変更する際に接続し直す手間を省くことができます。
開発中は、プロジェクトの変更やモーションの調整を行う可能性がありますので、こちらの接続方法もお勧めです。
■電源の用意
電源は、ACアダプターを使用します。バッテリーでも使用できますがACアダプターですとバッテリーのように残量を気にする必要がありませんので、開発の際はACアダプターがお勧めです。
ACアダプターの種類は、サーボに合わせて選択します。KXRシリーズは、6~7.4V対応のサーボを搭載していますので、6V2AのACアダプターを使用してください。
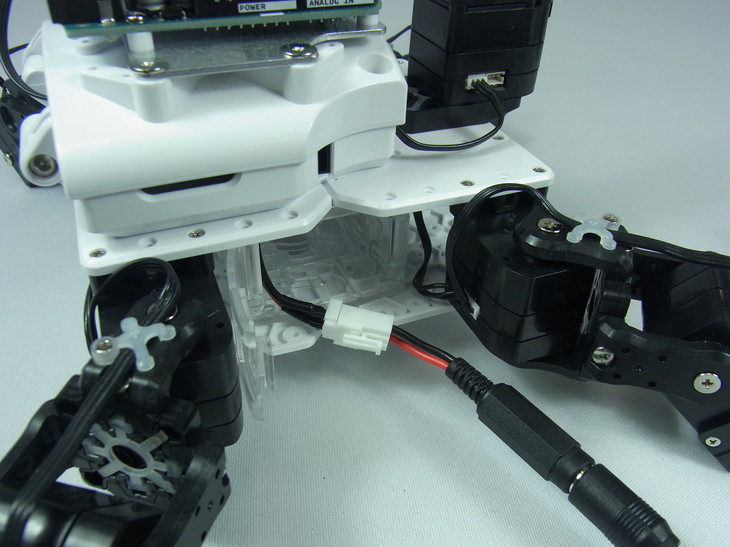
配線は、ACアダプター付属の変換ジャックを経由して電源スイッチハーネスに接続し、ロボットの電源端子とつなげば完了です。

■ロボットにプロジェクトを登録
HeartToHeart4を使用してロボットにプロジェクトを書き込みます。サンプルモーションが再生できる状態でしたら問題ありません。
また、COM通信速度は必ず「115200」に設定してください。Arduino UNOの仕様により125000ではご利用できません。
■プログラミング環境の準備
上記の他に、Arduinoをプログラミングするためのスケッチのインストール、ライブラリのインポートが必要です。こちらの方法は、『RCB-4 Library for Arduino』付属のマニュアルを参考に行ってください。
R3向け:『RCB-4 Library for Arduino Ver.1』
R4向け:『RCB-4 Library for Arduino Ver.2』
以上で準備が整いました。
バックパックを寝かせて固定しているローバー型、6脚型などは同じように固定することが可能です。Arduinoを簡単に固定でき、電源スイッチも共用で使えますので開発が楽になります。
次の記事では、RCB-4 Library for Arduinoに付属するサンプルプログラムを使用してサーボの制御を行います。
【付録】
●KXRシリーズ以外への固定方法
RCB-4変換基板はKHR-3HVやKMRシリーズに搭載されているRCB-4HVでもご利用できます。ただし、KHRシリーズ、KMRシリーズへの固定は別途加工が必要です。
●搭載サーボによる電源の違い
電源は、ロボットに搭載しているサーボの対応電圧に合わせてご選択ください。
・KRS-2552R3HV ICSなどHVサーボ搭載のロボットの場合
→ ROBOパワーセル F3-850タイプ (Li-Fe)、他
・KRS-3302 ICSなどLV対応サーボ搭載のロボットの場合
→ ROBOパワーセル Eタイプ 6N-800mAh(Ni-MH)
※バッテリーは種類によって専用の充電器が必要です。詳細は各バッテリーの商品ページをご参照ください。
次の記事『RCB-4変換基板の使用方法(3) Rcb4MotionPlay編(RCB-4改訂版)』
KHR-3HV Ver.3.1 リフェバッテリー付きセットの詳細をみる KHR-3HV Ver.3 リフェバッテリー付きセットの詳細をみる KMR-M6 Ver.3 リフェバッテリー付きセットの詳細をみる KHR-3HV Ver.2 リフェバッテリー付きセットの詳細をみる KXR-L2 ヒューマノイド型 Ver.2の詳細をみる KXR-L4T-R カメ型・ローバー型 Ver.2(アカデミックパック)の詳細をみる KXR-A5 アーム型 Ver.2の詳細をみる KXR アドバンスセットA Ver.2の詳細をみる RCB-4変換基板の詳細をみる KSBシールド2の詳細をみる KXR用オプションボード搭載セットCの詳細をみる KXR-L4T-R カメ型・ローバー型の詳細をみる KXR アドバンスセットAの詳細をみる KXR-A5 アーム型の詳細をみる KXR アドバンスセットBの詳細をみる