KXR用オプションボード搭載セットC
価格: ¥6,380 (税込)
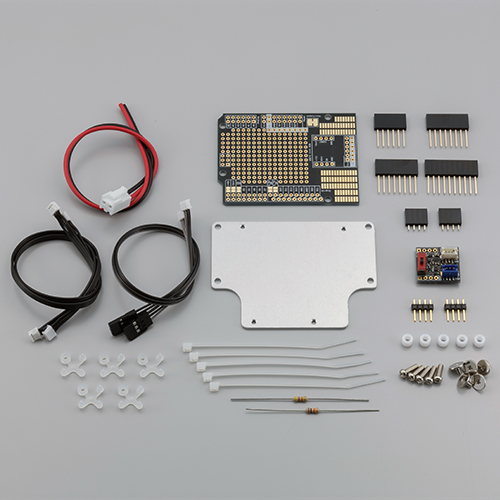
<セット内容>
●Arduino UNO搭載用板金 ×1
●RCB-4変換基板セット ×1式
●KSBシールド2 ×1式
●ZH接続ケーブル2A(200mm) ×2
●ZH接続ケーブルB(200mm) ×2
●ケーブルガイドX ×5
●ビス、スペーサー
<対応機種>
●KXRシリーズ
※バックパック搭載時にバランスが崩れるためKXR-L2ヒューマノイド型には搭載できません。
※Arduino UNO、バックパックは付属しません。
※板金はアルマイト処理をしていませんので多少の傷がある場合があります。
※ヘッダピンのはんだ付けが必要です。
商品説明
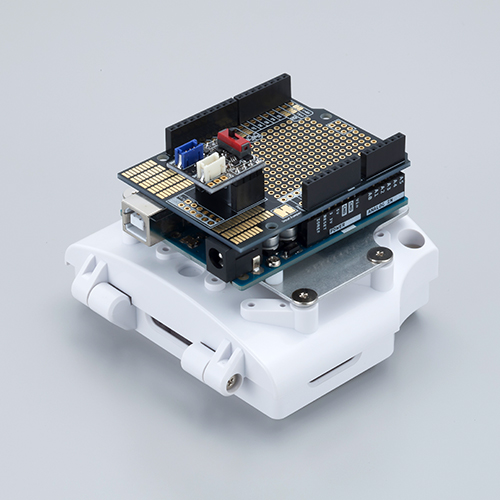
Arudino UNOをKXRシリーズのバックパックに搭載するための板金と、ビス、ケーブルのセットです。RCB-4変換基板、シールドも一式付属しますのでArduino UNOをご用意いただければすぐに開発を始められます。
※商品画像は、完成した状態です。本製品ははんだ作業が必要な個所があります。
■セットBとCの違いについて
セットBではICS変換基板が付属していますが、セットCではRCB-4変換基板が付属します。
セットB = Arduino UNOからサーボを直接制御する場合
セットC = Arduino UNOからロボットのRCB-4miniと通信しモーションを再生する場合
一部ケーブルの本数も異なりますが、その他セット内容に変更はありません。
■RCB-4変換基板とは
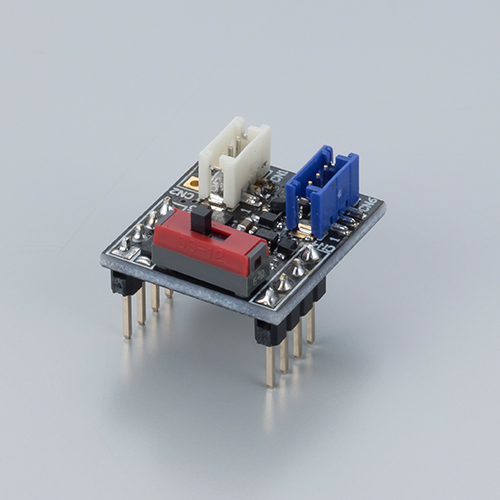

弊社RCB-4(HV/mini)を市販のマイコンボードのシリアル端子(UART)に接続するための変換基板です。Tx、Rxなどの通信線や電源などの回路を用意する手間が省け、接続するだけで簡単にRCB-4の制御が可能となります。
RCB-4変換基板とシールド、さらにライブラリを組み合わせることで、簡単にArduinoからモーション再生によるロボットを制御できるようになります。
●サポート記事『RCB-4 Library for Arduino ver.1.1』
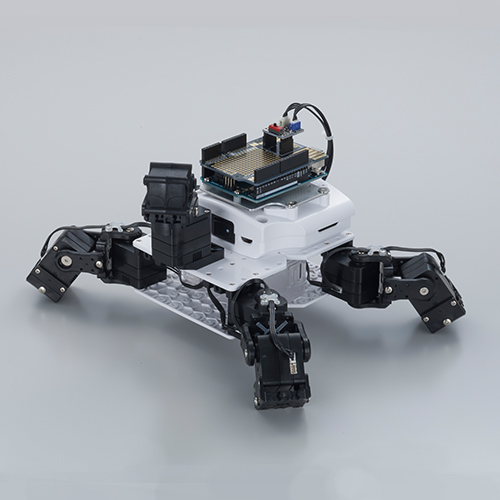
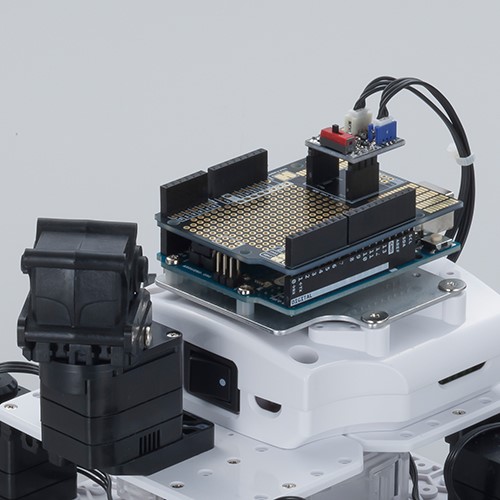
【搭載例】
ロボットのバックパックにボードを固定し、各サーボを直接制御して動かします。
●KXR-L4Tのバックパックに搭載
■固定方法
バックパックとボードの間にアルミの板金を挟んで固定します。ビスやスペーサーも付属します。
■電源ケーブル
RCB-4の空いているSIO端子(サーボ端子)からRCB-4変換基板上の電源端子へ配線することでArduinoに電源を供給することができます。接続には、付属のZH接続ケーブル2Aを使用します。
■RCB-4のCOMへの配線
ZH接続ケーブルを使用してRCB-4のCOMポートと変換基板を接続するだけで、簡単に通信することができます。