



KHR-3HV Ver.3 リフェバッテリー付きセット
価格: オープン
生産終了品
新商品「KHR-3HV Ver.3.1 リフェバッテリー付きセット」を発売しました。こちらをご利用ください。
<キット内容>
・軽量アルミ合金フレーム
(アルマイト処理済み)
・強化樹脂型サーボアーム
・コントロールボードRCB-4HV
・サーボモーター
KRS-2552R2HV ICS ×17
・ROBOパワーセル F3-850タイプ(Li-Fe)
・充電器G3 CHARGER
・Dual USB アダプターHS
・ブラックサーボリード
・その他パーツ
<ソフトウェア動作環境>
・対応OS/Windows 8.1 / 10 / 11
※使用する.NETのシステム要件を満たすこと。
・USBポート(1.1/2.0)
<完成時サイズ>
401.05(H)×194.4(w)×129(D) mm
<重量>
約1500g
【ダウンロード資料】
組立説明書、各種ソフトウェアはこちらからダウンロードしてご利用ください。

Made in Japan
商品説明

【しっかりとした安定歩行】
KHR-3HVの関節に使用しているロボットのために開発されたKRS-2552R2HVサーボモータは、全段に金属ギヤを採用し、ハイパワーなモータを搭載することで高剛性、高精度な動作を実現しました。そのため、二足歩行ロボットでありながら転倒しにくい、しっかりとした安定歩行が可能です。

【組み立てやすいキット内容】
KHRの組み立てに特殊な工具や技術は一切必要ありません。ドライバーによるねじ止め作業だけでほとんどの作業が完了します。慣れている人でしたら1日、通常は2~3日で組み上げることが可能です。親切な組立説明書も付属します。
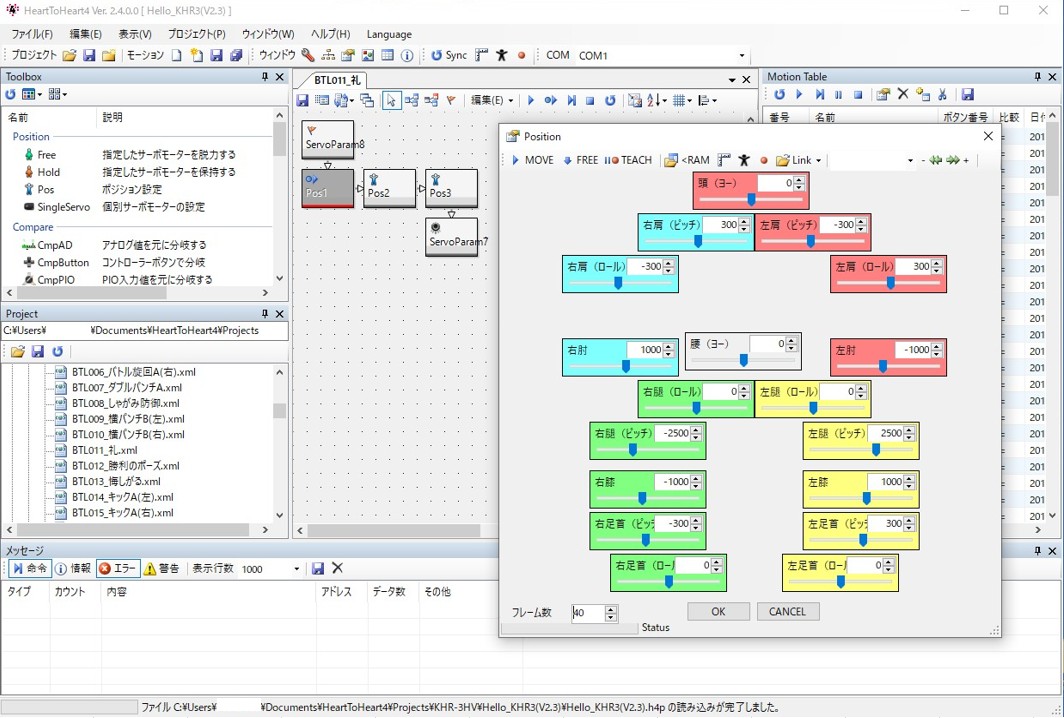
【扱いやすい専用のソフトが付属】
KHRのプログラミングに専門知識は不要です。多彩な機能を持つパネルを並べていくだけで簡単にモーション作りができます。ほとんどの作業はマウス操作だけです。さらに「教示機能」を活用すれば、直接ポーズを取ってモーションをプログラムすることもできます。
プログラミングソフト「HeartToHeart4」の使い方を解説した特設ページを公開中です。
 『HeartToHeart4講座』
『HeartToHeart4講座』

【シンプルなセット内容】
KHR-3HVは、最小限に必要なものだけがパッケージされています。それは、ロボットの使い方は人それぞれ違いますので、余計な費用を負担することなく、多様な要望に応えられるようにという考えがあるからです。豊富なオプションラインナップから、KHRオーナー独自のセットを選んでください。
【用途に応えるオプションラインナップ】
無線機器や、ジャイロセンサー、加速度センサーなどのセンサー類、各種フレームなど、KHRにはユーザーの用途に合わせたオプションが用意されています。
【豊富なサンプルモーション】
キットには多数のサンプルモーションが付属しますので、前進、後進などの基本動作はもちろん、シュートやパンチ、あいさつや逆立ちなど多彩な動きをすぐに実現できます。以下の動画にあるモーションは、全て配布しているサンプルモーションを再生しています。

※動画のロボットは、キット標準状態にジャイロセンサKRG-4を搭載しています。
【パワフルなリフェバッテリー】


リフェバッテリーは、従来のニッケル水素バッテリーに比べて放電容量が高く、ロボットをより安定的に動作させることができます。
KHR-3HV標準の17軸でも効果がありますし、22軸以上に増やしたりKRS-2572R2HVなど高トルクなサーボに交換してもふらつきにくくなります。
リフェバッテリーに関しましては以下の記事をご覧ください。
■サポートページ『Li-Feバッテリーのメリットと注意事項』
2023.5.18
キットに付属する充電器がBX-20LFからG3 CHARGER(G-FORCE社製)に変更になりました。
<Ver.3への変更点>
【サーボが進化しました!】

従来のKHR-3HVではICS3.5のサーボモーターを使用していましたが Ver.3よりICS3.6対応のKRS-2552R2HVに変更になりました。 ICS3.6では、現在値を取得するためのコマンドが追加されています。
ICS3.5の詳しい機能はこちらのサポートページ『ICS3.6と3.5の違いと新機能についての紹介』をご覧下さい。
サーボ通信速度初期値:115200bps
【RCB4+HTH4を使用する場合】
ICSバージョンをアップしましたが、サーボに互換性があるためKHR-3HV Ver.2以前のモーション等々はそのまま使用できます。
【市販マイコンボードを使用し、ロボットを自前のプログラムで動かす場合】
ICS3.6になり、ポジションコマンドを使わずに角度が取得できるようになったため、任意のタイミングで角度が取得できるようになりました。動作中に角度を取得できることで、現在の姿勢をより正確に取得しやすくなりました。
【ライトグレーのパーツがダークグレーに変更になりました】
Ver.2まではライトグレーのパーツが付属していましたが、よりスタイリッシュなダークグレーに変更。ロボットが引き締まった印象になりました。
【柔らかくて丈夫なブラックサーボリードに変更】
新規にブラックサーボリードを採用。柔らかい素材になりましたので、ロボットの稼働を邪魔しにくく、繰り返し動作による断線が起こりにくくなりました。
<キットの内容とオプションの搭載>
■キット内容でできること
KHR-3HVのセット内容は、ロボット本体のみのシンプルな構成です。キットの状態では、付属のUSBアダプターを使用して有線でPCと通信します。PCにインストールされた専用ソフトHeartToHeart4を使用することで、ロボットのメンテナンスから、モーションの作成と登録、再生まですべて行うことができます。
■おすすめオプション(別売り)
このキットにオプションのセンサーやユニットを追加することで、無線操縦や歩行の自動補正などを行うことができます。

・無線送信機:KRC-5FH (1セット)
手元のコントローラーでボタン操作によるロボットの無線操縦が可能になります。セットには受信機が付属していますので、こちらのセットのみで無線化に対応します。
搭載方法はこちらをご覧ください。

・ジャイロセンサー:KRG-4 (2セット)
ロボットの姿勢を検知し、歩行を自動補正するためのセンサーです。このジャイロセンサーは一軸のみ検知するセンサーですので前後方向と左右方向用に2個使用します。
搭載方法はこちらをご覧ください。
・加速度センサー:RAS-3 Aセット(ZH⇔サーボコネクタ付属) (1セット)
ロボットが転倒した際に、仰向けかうつ伏せかを検知し、起き上がりモーションを自動で判断することができます。こちらは3軸検知できますので、1個搭載します。
搭載方法はこちらをご覧ください。

KHR-3HV Ver.3で使用しているKRS-2552R2HVバージョンの 拡張用サーボ5個セットです。 KHR-3HVに組み込むことで、ロボットの関節の数を標準の17軸から 22軸へ変更することができます。

KHR-3HVの股関節の可動範囲を大幅に広げる為のフレームセットです。
キットの腰部を本製品と交換するだけで180°以上の開脚が可能になります。
関連するオプション
-

KRG-5 Aセット(ZH⇔サーボコネクタ付属) 2個入り
コード: 03213 ¥9,900 (税込)ロボットの姿勢制御に最適なジャイロセンサ。搭載することで二足歩行ロボットの歩行時の安定性が良くなります。RCB-4HVに最適なケーブルが付属します。
-

KHR-3HV用パーツセット(ダークグレー)
コード: 02237 ¥4,400 (税込) -

バックパックセットA(ダークグレー)
コード: 02238 ¥3,300 (税込) -

ケーブルガイド(小)(ダークグレー)
コード: 02239 ¥660 (税込)KHR-3HV Ver.3に採用されているダークグレータイプのケーブルガイドです。
-

KHR-3HV拡張用サーボ5個セット Ver.3
コード: 03199 オープンKHR-3HV Ver.3向けの拡張用サーボセット。腰に1軸、腕に左右各1軸、股関節に左右各1軸を追加することができます。サーボID書換済みで、ケーブルもセットになったお得なセットです。以前のKHR-3HV(No.03110/03070/03020)にも使用できます。
-

ACアダプター(12V5A)
コード: 03140 ¥4,950 (税込)KHR-3HVなどHVサーボを使用したロボットに最適なACアダプターです。HV変換DCジャックが付属します。
-
RAS-3 Aセット(ZH⇔サーボコネクタ付属)
コード: 03122 ¥4,180 (税込)3軸加速度センサー。ロボットが倒れた際の起き上がり判定など、ロボットの姿勢を検出するために使用します。
-

フロントデカールA(ブルー・レッド)(KHR-3HV用)
コード: 02180 ¥550 (税込)KHR-3HVのフェイスパーツとフロントカウルにぴったりのデカールです。ブルーとレッドの2枚入りです。
-

KRC-5FH 送受信機セット
コード: 03099 ¥15,950 (税込)KRC-5FHはロボット用無線コントローラです。各ボタンを押すことで、そこに割り当てられたモーションを再生することができます。小型で使いやすく、操縦に便利な機能も多数備えています。
-

KHR-3HV開脚フレームセット
コード: 03032 ¥7,260 (税込)KHR-3HVの股関節の可動範囲を大幅に広げるためのフレームセットです。サッカーイベントのゴールキーパーなどに有効な180°開脚した状態にすることが出来るようになります。KRS-2500シリーズのサーボを1個追加することで腰旋回軸を追加できます。
-

ジャイロセンサーKRG-4
コード: 03003 ¥5,500 (税込)軽量省スペース。 専用ケース設計により 取付け性良好。新型センサー使用により、環境や、使用時間により出力が変動するドリフトが、非常に少なく抑えられています。
-

KHR-3HV用ブラックパーツセット
コード: 02101 ¥4,950 (税込)KHR-3HVに使用されているグレーの樹脂パーツをブラックで成型。
交換するだけでKHR-3HVがよりスタイリッシュに! -

アルミ小径ホーン(PCDφ12-M2-オフセット0)
コード: 02093 ¥1,100 (税込)KHR-3HVのキット標準サーボホーンと同形状のアルミサーボホーン。樹脂から交換することで軸の強度をアップすることができます。