KBT-1を使ってロボットと無線通信をする(2)
「KBT-1を使ってロボットと無線通信をする」の第2回です。今回から本格的に6足歩行ロボットKMR-M6を動かします。
まずは、KBT-1を用いて「HeartToHeart4とKMR-M6間通信を無線化する」方法を紹介します。
前記事
準備するもの
<ハードウェア>
- ロボット:KMR-M6(RCB-4HV)
- 無線モジュール:KBT-1
- Bluetooth内蔵のPC、または市販のUSB Bluetooth アダプター(KBT-1はclass2ですので通信距離は10mとなっています)
- ※ドライバは市販モジュール付属の説明書に従いインストールしてください
※本製品はBluetooth®2.0に対応しております。4.0には対応しておりません。あらかじめご了承下さい。
<ソフトウェア>
- HeartToHeart4 ver2.0 (あらかじめインストールを行い作業を始めてください)
KBT-1を用いてHTH4とKMR-M6間通信を無線化する
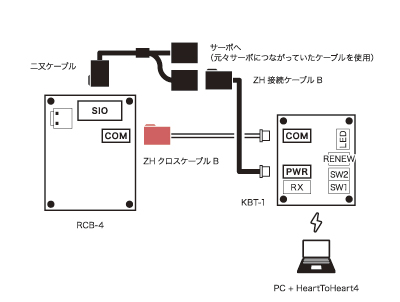
①KBT-1とRCB4-HVの配線をします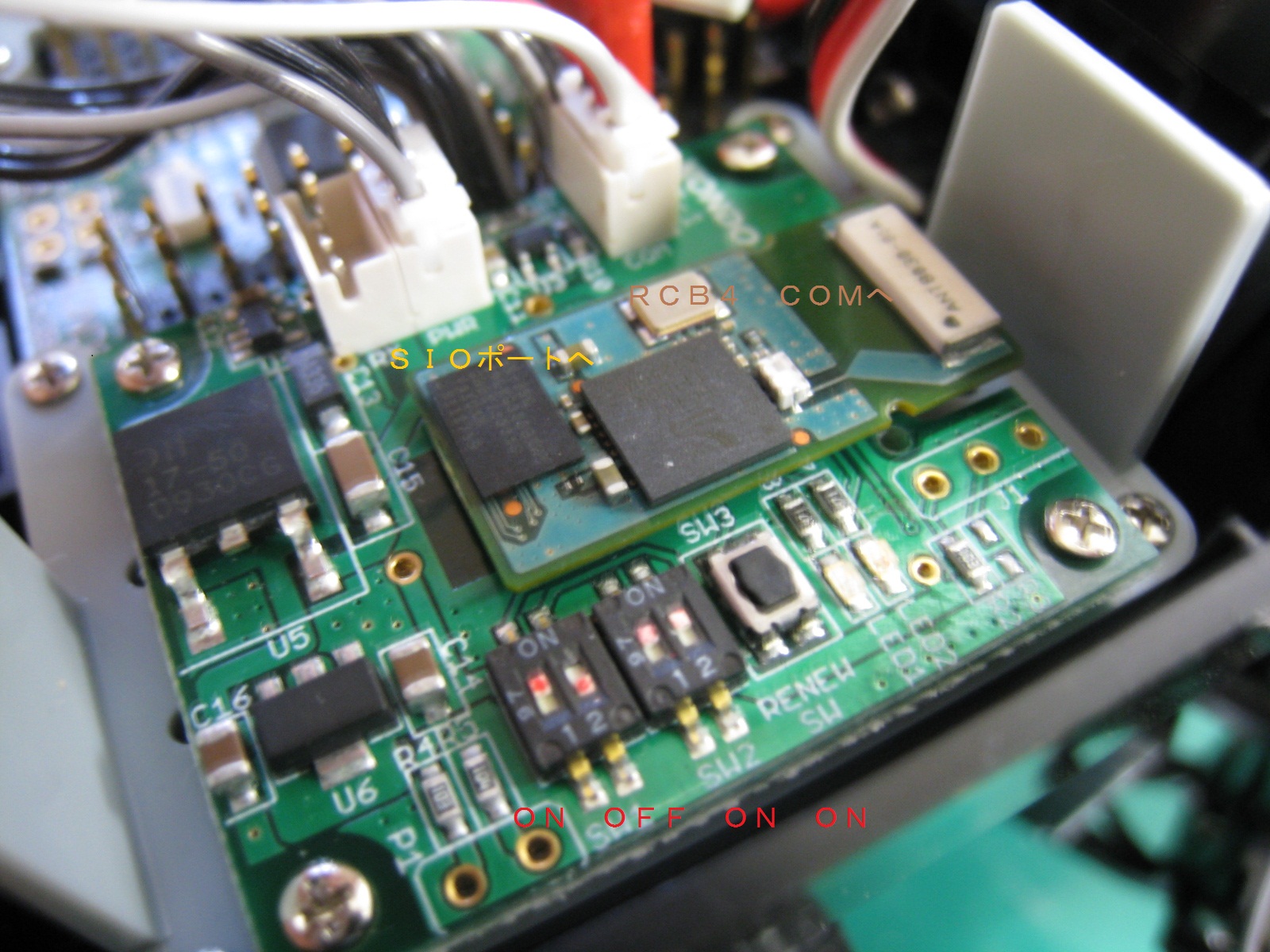
コネクタには向きがあります。黒いラインがケーブルの外側に来るように接続してください。
また、RCB-4HVの電源を切ってからケーブルを接続してください。
COM端子同士の接続
 RCB-4HVのCOM端子に接続されている延長ケーブルのコネクタを抜き、KBT-1に付属している赤いコネクタのZH クロスケーブルBに変更します。赤いコネクタ側をCOM端子に接続してください。ZHクロスケーブルのZHコネクタ側をKBT-1のCOMに接続します。
RCB-4HVのCOM端子に接続されている延長ケーブルのコネクタを抜き、KBT-1に付属している赤いコネクタのZH クロスケーブルBに変更します。赤いコネクタ側をCOM端子に接続してください。ZHクロスケーブルのZHコネクタ側をKBT-1のCOMに接続します。
電源端子の接続
KBT-1の電源はRCB-4HVのSIOポートから出力される電源を用います。RCB-4HVのSIOポートとKBT-1のPWRをZH 接続ケーブルBを用いて接続します。
②KBT-1のディップスイッチを「スレーブRCB-4モード」に設定します
HTH4を用いて、KBT-1経由でRCB4を動かすためには、KBT-1を「スレーブRCB-4モード」に設定します。
| スイッチ | SW1 | SW2 | ||
| スイッチ番号 | 1 | 2 | 1 | 2 |
| 状態 | ON | OFF | OFF | ON |
③ペアリングをします(初回時のみ)
ペアリングとは、KBT-1と接続するBluetoothデバイス同士のお互いのID番号を認識させることです。初めてBluetoothデバイスと接続するとき必ず1回はペアリングを行う必要があります。
ペアリングをする時、KBT-1側はPC側から見つけられるように設定する必要があります。
まず、KMR-M6の電源を入れます。電源を入れた後にKBT-1のRENEWボタンを押すと、KBT-1の赤いステータスLEDが早い点滅になり、他のUSB Bluetoothアダプタ(PCやBluetooth搭載端末)から見つけられるようになります。
ペアリングが完了すると、COMポート番号が割り当てられますので覚えておきます。
詳細なペアリング方法は、KBT-1の説明書3ページをご覧下さい。
④HTH4を起動します。
パソコンにインストールされているHTH4を起動してください。必ずVer.2.0以降を使用してください。
⑤COMポートを選択します。
HTH4のメインウィンドウにあるCOMツールバーでペアリング時に割り当てられたCOM番号を選択してください。
COM番号がわからなくなってしまった方は下記の手順で確認してください。「Bluetooth Stack for Windows by Toshiba ソフトウェア」を例にご紹介します。
- Bluetooth Stack for Windows by Toshiba ソフトウェアのBluetoothの設定を開きます。
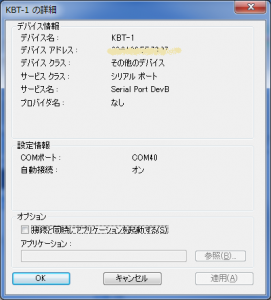
- KBT-1のアイコンがありますので、右クリックをして詳細を選択します。KBT Managerを利用して名前を変更した場合は、その名前が表示されます。出荷時の名称は「KBT-1」です。名前がない場合はペアリングできていません。再度ペアリングを試みてください。

- 右図のような詳細画面がでます。設定情報の中にCOMポート名がありますので、こちらの番号を控えてください。
以上で設定は終わりです。通信が確立出来ている場合は緑の送受信LEDが点灯します。
これによりモーションの書き込みや再生等のコマンドを無線化することができました。
HTH4は普段のようにご使用下さい。また、HTH3でも同じように使用することができます。詳細は、KBT-1の取扱説明書をご参照下さい。
【注意事項】
※「COM通信速度」は115200bpsのみ設定可能です。1.25Mbpsでは速度が違い通信ができませんので必ずプロジェクト設定ウィンドウでCOM通信速度を115200bpsに設定してください。

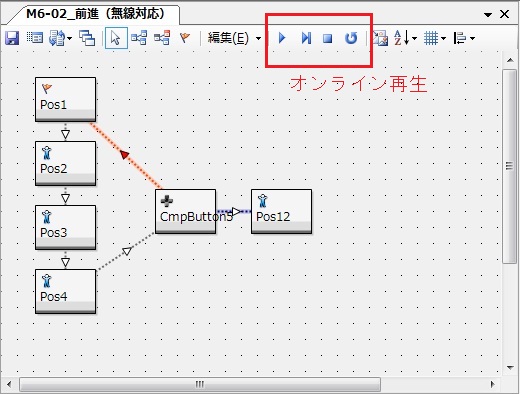
※ROMやRAMに保存されているモーションは再生できますが、こちらからデータを送り続けるオンライン再生は対応しておりません。
次回は
次回は、PCからロボットのモーションを再生する方法をご紹介します。
KHR-3HV Ver.3 リフェバッテリー付きセットの詳細をみる KHR-3HV Ver.2 リフェバッテリー付きセットの詳細をみる KHR-3HV Ver.2の詳細をみる KHR-3HV Ver.2 セレクトパックの詳細をみる KMR-M6 Ver.2 リフェバッテリー付きセットの詳細をみる カメ型ロボット02 Ver.1.5の詳細をみる KMR-P4 Ver.1.5 リフェバッテリー付きセットの詳細をみる BluetoothモジュールKBT-1の詳細をみる