




KHR-3HV Ver.2
価格: オープン
販売終了品
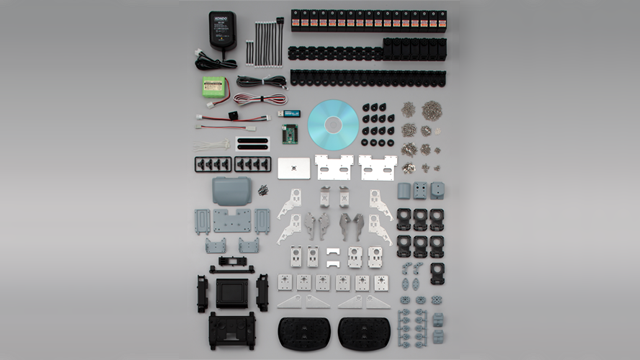
<キット内容>
-
軽量アルミ合金フレーム(アルマイト処理済み)
-
強化樹脂型サーボアーム
-
バスタブソールS-02
-
コントロールボードRCB-4HV
-
サーボモーター KRS-2552RHV ICS ×17
-
ROBOパワーセルHV Dタイプ10.8V -800mAhニッケル水素バッテリー
-
AC100V専用充電器MX-201
-
Dual USB アダプターHS
-
CD-ROM(マニュアル一式、サンプルモーションなど)
-
その他パーツ
<ソフトウェア動作環境>
- 対応OS/WindowsXP SP2以降 Windows Vista(SP1推奨)Windows7
※Microsoft.NET Framework 2.0が必要です。 - CPU/Pentium4 2GHz以上推奨
- 使用時空きメモリー/64MByte以上
- ハードディスク/約32MByte 使用
- CD-ROMドライブ(ソフトウェアインストール用)
- USBポート(1.1/2.0)
<完成時サイズ>
401.05(H)×194.4(w)×129(D) mm
<重量>
約1500g
Made in Japan
商品説明
付属するバッテリがリチウムフェライトに変更になった「KHR-3HV Ver.2 リフェバッテリー付きセット」を販売中です!こちらをご利用ください。
【しっかりとした安定歩行】
KHR-3HVの関節に使用しているロボットのために開発されたKRS-2552RHVサーボモータは、全段に金属ギヤを採用し、ハイパワーなモータを搭載することで高剛性、高精度な動作を実現しました。そのため、二足歩行ロボットでありながら転倒しにくい、しっかりとした安定歩行が可能です。
【組み立てやすいキット内容】
KHRの組み立てに特殊な工具や技術は一切必要ありません。ドライバーによるねじ止め作業だけでほとんどの作業が完了します。慣れている人でしたら1日、通常は2~3日で組み上げることが可能です。親切な組立説明書も付属します。
【扱いやすい専用のソフトが付属】
KHRのプログラミングに専門知識は不要です。多彩な機能を持つパネルを並べていくだけで簡単にモーション作りができます。ほとんどの作業はマウス操作だけです。さらに「教示機能」を活用すれば、直接ポーズを取ってモーションをプログラムすることもできます。キットには多数のサンプルモーションが付属しますので、前進、後進などの基本動作はもちろん、シュートやパンチ、あいさつや逆立ちなど多彩な動きをすぐに実現できます。
【シンプルなセット内容】
KHR-3HVは、最小限に必要なものだけがパッケージされています。それは、ロボットの使い方は人それぞれ違いますので、余計な費用を負担することなく、多様な要望に応えられるようにという考えがあるからです。豊富なオプションラインナップから、KHRオーナー独自のセットを選んでください。
【用途に応えるオプションラインナップ】
無線LANボード、Bluetoothモジュール、ゲームパッドなどの無線機器や、ジャイロセンサー、加速度センサーなどのセンサー類、各種フレームなど、KHRにはユーザーの用途に合わせたオプションが用意されています。

<Ver.2への変更点>
【サーボが進化しました!】
従来のKHR-3HVではICS3.0のサーボモーターを使用していましたが Ver.2よりICS3.5対応のKRS-2552RHVに変更になりました。 ICS3.5では、付属のDual USBアダプターを使用することでシリアルとPWMを 切り替えて使用できます。
ICS3.5の詳しい機能はこちらのサポートページ『ICS3.5 解説』をご覧下さい。
サーボ通信速度初期値:115200bps
【モーション作成ソフトがさらに使いやすくなりました!】
内容を一新し、より使い易くなったHeartToHeart4最新版Ver.2.1が付属します。 プログラミング言語を使用することなく、マウス操作だけで様々なモーションを 作ることができます。
HeartToHeart4 ソフトウェアについてはこちらをご覧ください。
【USBアダプターが新しくなりました!】
シリアルUSBアダプターHSからDual USBアダプターHSに変更になりました。 Dual USBアダプターHSは、「シリアルモード」と「ICSモード」が使えますので コントロールボードRCB-4HVとの通信はもちろん、サーボの細かな設定も可能です。 サーボやKRI-3のIDの変更や通信速度の設定も楽になりました。
【マニュアルがより分かりやすくなりました!】
『KHR-3HV組立説明書』『HeartToHeart4ユーザーズマニュアル』を再編集しました。 組立説明書は、HeartToHeart4の進化やDual USBアダプターHSを活用したことで ソフトの手順が減り、シンプルで簡単に操作できるようになりました。 さらに、頭部で使用しているサーボを腰軸に変更する組立方法も追加しました。 お好みのスタイルでロボットを組み立てられます。
KHR-3HV 特徴
KRS-2552RHVサーボが実現したかつてない性能

デイジーチェーン接続で スタイリッシュかつ動作制限を抑制

正座も出来る独特の骨格形状をデザイン

新デザインソールで安定感抜群

新設計アングル&サーボアーム
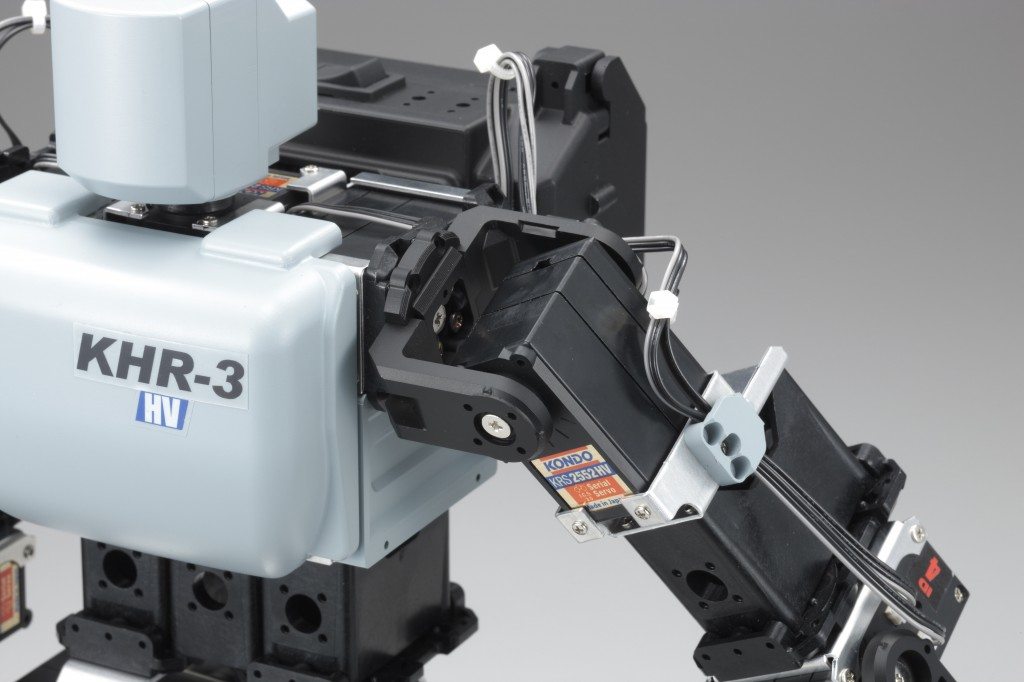
オリジナルヘッドが楽しめるヘッドサーボ

関節にダミーサーボを使用して 発展性を約束

無線コントロールにも対応
機能的なバックパックスタイルでメンテナンスも楽々

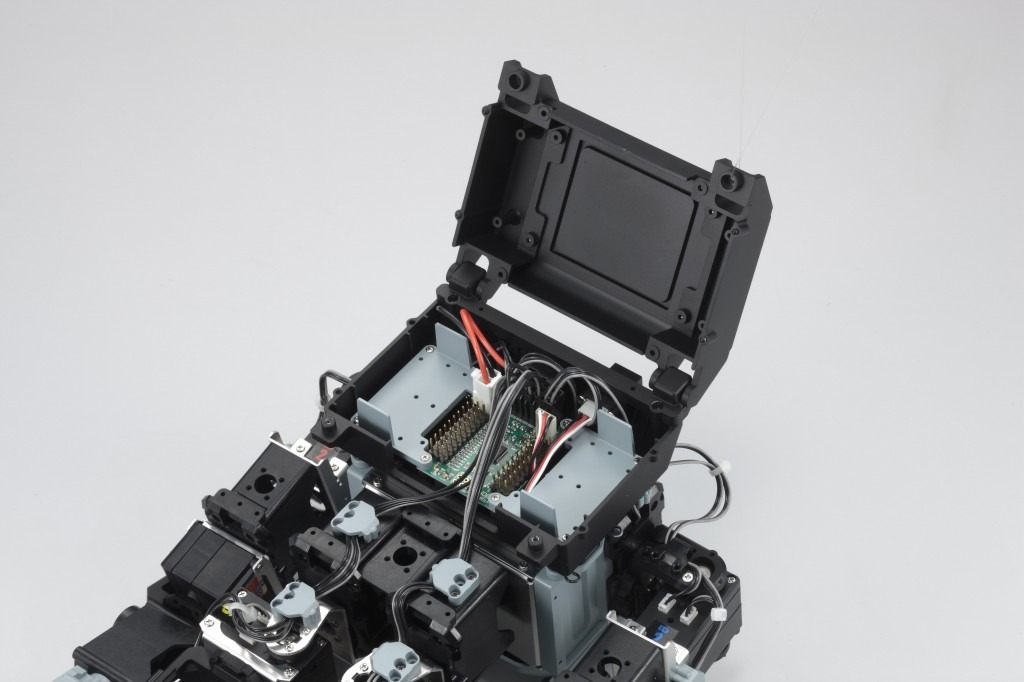 バックパックにはメインボード、さらにはPC通信コネクタまで集中搭載。ワンタッチ開閉できるハッチ等とも相まってアクセスが簡単。
バックパックにはメインボード、さらにはPC通信コネクタまで集中搭載。ワンタッチ開閉できるハッチ等とも相まってアクセスが簡単。
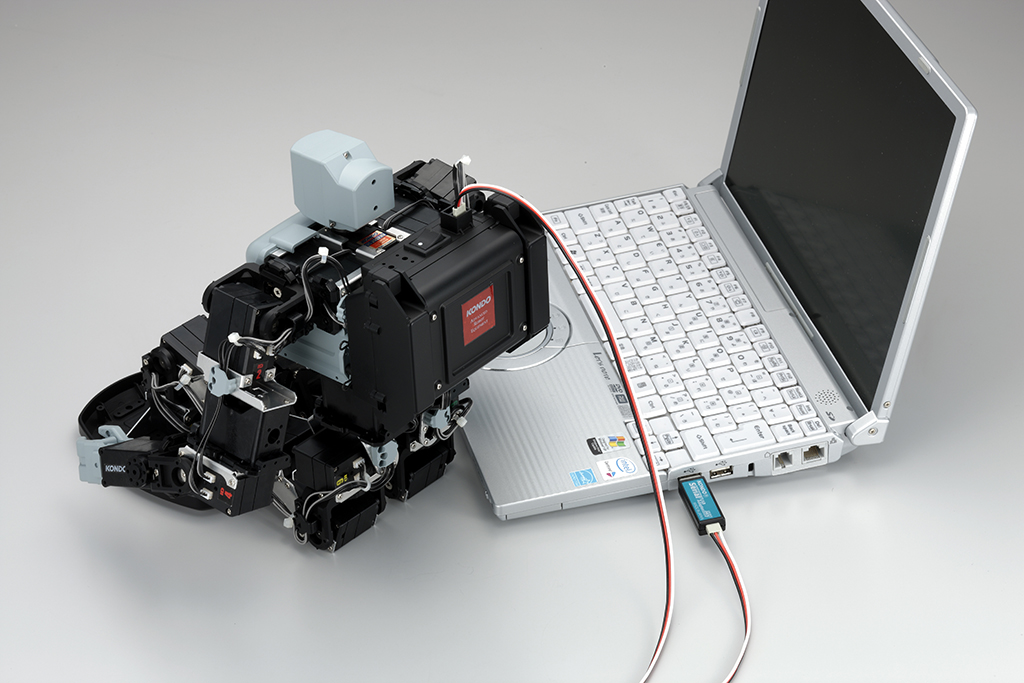
すべてを最新仕様としたRCB-4HVとバージョンアップしたHeart to Heart

大容量バッテリーと急速充電器

USB高速通信でさくさく転送
完成後は箱がキャリングケースに!

モーション作成管理ソフトウェアはHeartToHear4が付属

詳しくはこちらをご覧ください。
関連するオプション
-

BX-10L
コード: 51201 ¥4,950 (税込)BX-10Lは、リポ、リフェ(2~3セル)対応のバランスチャージャーです。 充電電流も0.5A、1A、2Aからお手持ちのバッテリーに合わせて充電できます。 ボタン一つで簡単操作。初心者にもお勧めです。
-

KRC-4GP
コード: 03074 ¥8,800 (税込)KRC-4GPはLogicool Wireless Gamepad F710と通信するためのアダプターです。 こちらを使用することによってゲームパットからロボットを操縦することが可能になります。
-

KHR-3HV拡張用サーボ5個セットVer.2
コード: 03069 オープンKHR-3HV Ver.2向けの拡張用サーボセット。腰に1軸、腕に左右各1軸、股関節に左右各1軸を追加することができます。サーボID書換済みで、ケーブルもセットになったお得なセットです。KHR-3HV(No.03020)にも使用できます。
-
BluetoothモジュールKBT-1
コード: 03062 ¥13,200 (税込)コントロールボードRCBシリーズやKCB-1とPCをBluetooth®で無線通信するためのモジュールです。 アプリをダウンロードすればAndroid端末からでも操縦ができます。
-

加速度センサーRAS-2C
コード: 03045 ¥3,520 (税込)KHRの起き上がり判定で使用する加速度センサー。5V駆動なので加速度センサーとして汎用的に使用できます。従来のRAS-2が接続ケーブル(100mm)2本付属に変更になりました。本体の仕様には変更ありません。
-

KHR-3HV開脚フレームセット
コード: 03032 ¥7,260 (税込)KHR-3HVの股関節の可動範囲を大幅に広げるためのフレームセットです。サッカーイベントのゴールキーパーなどに有効な180°開脚した状態にすることが出来るようになります。KRS-2500シリーズのサーボを1個追加することで腰旋回軸を追加できます。
-

シリアルICS変換ユニットKRI-3
コード: 03022 ¥2,750 (税込)KRR-1からの低速シリアルを、RCB-4HVのシリアル端子(高速シリアル)対応に変換するための中継基板。
KHR-3HVを無線操縦ための必需品です。 -

ジャイロセンサーKRG-4
コード: 03003 ¥5,500 (税込)軽量省スペース。 専用ケース設計により 取付け性良好。新型センサー使用により、環境や、使用時間により出力が変動するドリフトが、非常に少なく抑えられています。
-

KHR-3HV用ブラックパーツセット
コード: 02101 ¥4,950 (税込)KHR-3HVに使用されているグレーの樹脂パーツをブラックで成型。
交換するだけでKHR-3HVがよりスタイリッシュに! -

KONDOドライバーセット1
コード: 02095 ¥3,850 (税込)KHRシリーズの組み立てに必要なドライバーを1つにまとめました。 初めてロボットを作る方の工具セットとしてご利用頂けます。 また、ドライバーのビットは大変精度がよいので、上級者の方でも 満足してご使用いただけます。
六角ドライバーはクランプホーンを締めるビスにお勧めです。
