KBT-1を使ってロボットと無線通信をする(1)
これから3回にわたり、ロボット用bluetoothモジュールKBT-1を用いて6足歩行ロボットKMR-M6をPCから無線で動かす方法について紹介していきます。
目次
- 第1回:KBT-1の紹介(この記事)

- 第2回:HeartToHeart4とKMR-M6間の通信を無線化する
弊社モーション作成ソフトウェアHeartToHeart4(以降HTH4)と6足歩行ロボットKMR-M6をKBT-1を用いて無線化する方法を紹介します。
- 第3回:KMR-M6に登録したモーションを再生する
HTH4で作成したモーションを様々な方法で無線コントロールする方法を紹介します。
KBT-1とは
KBT-1は、KHRやKMRなど弊社製ロボットを動かすためのBluetooth無線モジュールです。
Bluetoothを用いる事により、ソフトウェアがあればPCのみならずBluetoothを搭載した小型端末でも通信することができるようになります。
※本製品はBluetooth®2.0に対応しております。4.0には対応しておりません。あらかじめご了承下さい。
- HeartToHeart4で作成したモーションを無線で書き込むことができる
今まで、HeartToHeart4を用いてモーションを作成する時、PCとロボットをシリアルUSBアダプタ等を接続し通信を行ってきました。有線でしたので、ケーブルが邪魔でモーションを作成するのに支障がでたり、ロボットの行動範囲が制限され床で動かすこともままらないこともありました。KBT-1を用いてケーブルレス(無線化)にすることにより、これらの問題が解消されました。
- 小型、軽量で取り付けが容易である

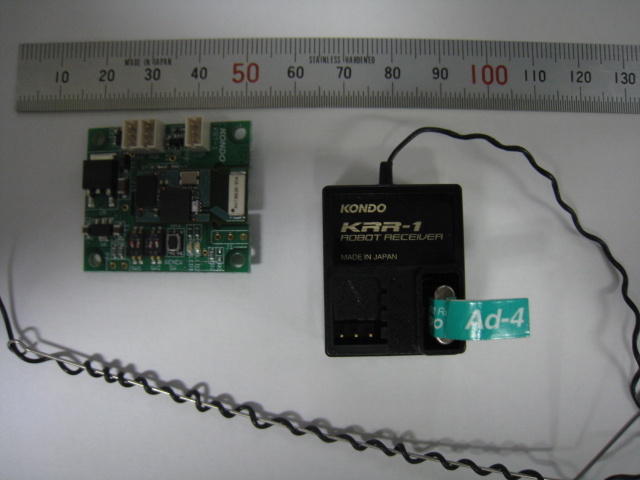
KBT-1は小型のbluetoothのモジュールを採用することにより、容積を非常に抑えることができました。内蔵アンテナですので、弊社が販売している無線モジュール(KRR-1)のようなアンテナ線の取回しなどを考える必要がなくなりました。
また、弊社ロボットの取り付け穴に合わせ設計してありますので、容易にしっかりととりつけることができます。

- 双方向通信ができる
今まで弊社が販売している無線モジュールは、コマンド送信のみしかできませんでした。KBT-1では双方向通信が可能となっています。KBT-1を搭載することで、ロボットの状態を無線で取得できるようになり、離れているロボットからの異常をなどを検知できるようになります。
- PCだけではなく、Bluetoothを搭載した端末から操作ができる
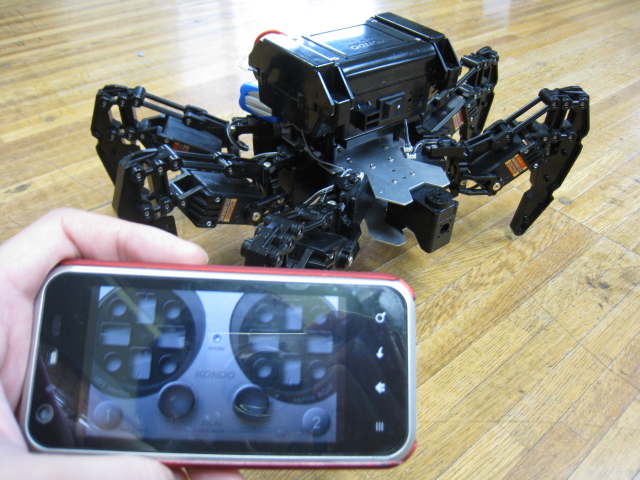 今回、Bluetoothを採用したことにより、PCからの操縦もできるだけではなく、Android携帯端末のようなBluetoothを搭載した小型デバイスと通信を行うことができます。
今回、Bluetoothを採用したことにより、PCからの操縦もできるだけではなく、Android携帯端末のようなBluetoothを搭載した小型デバイスと通信を行うことができます。
※アプリの販売は終了しました。
次回について
次回は、HeartToHeart4とKMR-M6間の通信を無線化する方法について紹介します。
弊社のロボット用モーション作成ソフトウェアHTH4を用いて、6足歩行ロボット(KMR-M6)に無線でモーションの書き込みを行います。
第2回、第3回もぜひご期待ください。
KHR-3HV Ver.3 リフェバッテリー付きセットの詳細をみる KHR-3HV Ver.2 リフェバッテリー付きセットの詳細をみる KHR-3HV Ver.2の詳細をみる KHR-3HV Ver.2 セレクトパックの詳細をみる KMR-M6 Ver.2 リフェバッテリー付きセットの詳細をみる カメ型ロボット02 Ver.1.5の詳細をみる KMR-P4 Ver.1.5 リフェバッテリー付きセットの詳細をみる BluetoothモジュールKBT-1の詳細をみる