HeartToHeart4講座(2-3) トリムを調整する
今回は、通信状態の確認とトリム調整についてです。トリム調整は、ロボットが安定して歩行するために重要な作業です。姿勢がまっすぐになるように、しっかり調整してください。
以下の手順は、前回の記事によりプロジェクトが展開されている状態を前提に解説します。プロジェクトを展開する方法は『HeartToHeart4講座(2-2) サンプルプロジェクトを開く』を参照してください。
【関連記事】
第二章
HeartToHeart4講座(2-1) プロジェクトについて
HeartToHeart4講座(2-2) サンプルプロジェクトを開く
HeartToHeart4講座(2-4) モーション再生(有線、無線)
第一章、第三章については下記のページからご参照ください。
■通信状態の確認
COM番号の設定と、PCとロボットの通信状態を確認します。
1.COM番号の選択
PCとロボットが通信するためには、COM番号を設定しておく必要があります。COM番号とは、ドライバソフトをインストールした際に確認した番号です。番号の確認方法は、『HeartToHeart4講座(1-2) PCとロボットを接続する』をご参照ください。
PCにDual USBアダプターHSが接続されていることを確認し、COMツールバーにある「ポート選択ボックスメニュー」からDual USBアダプターHSのCOM番号を選択します。
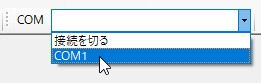
メニューにCOM番号が表示されない場合は、USBアダプターのドライバーが正常にインストールされていない可能性があります。KO Driver2015付属のマニュアルの手順にしたがって状態を確認してください。
2.通信状態の確認
1)プロジェクト設定ウィンドウを開きます。
![]()
2)ロボットの電源を入れます。
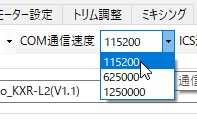
3)COM通信速度から「115200」を選択します。
4)メッセージウィンドウにエラーが出なければ通信状態は問題ありません。

エラーが発生した場合は、以下のように赤いマークが表示されます。
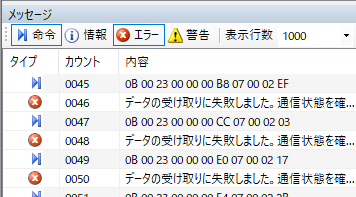
エラーの場合は、下記の内容をご確認ください。
・配線は正しいですか?各ケーブルが指定の場所に正確につながっているか確認してください。
・Dual USBアダプターHSはシリアルモード(緑LED)になっていますか?
・ロボット本体の電源は入っていますか?
・ロボットに電源が正しく接続されていますか?
・バッテリーの残量は十分ですか?
通信状態に問題がないことが確認できたら、次はトリム調整を行います。
■トリム調整とは
二足や四足歩行ロボットなど、歩行するロボットは前後左右のバランスが均等でないとまっすぐ歩くことができません。トリム調整では、組み立て時のパーツ取り付けで起きたズレをパラメータで微調整し、前後左右のバランスを整える作業です。
・誤差が発生する原因
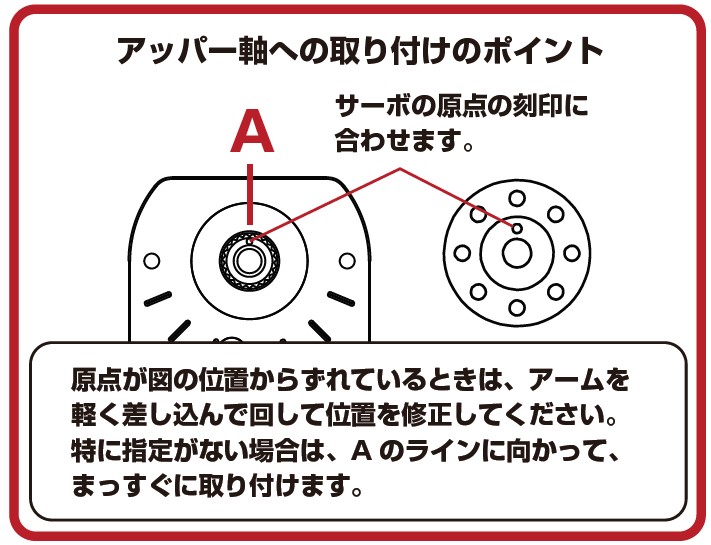
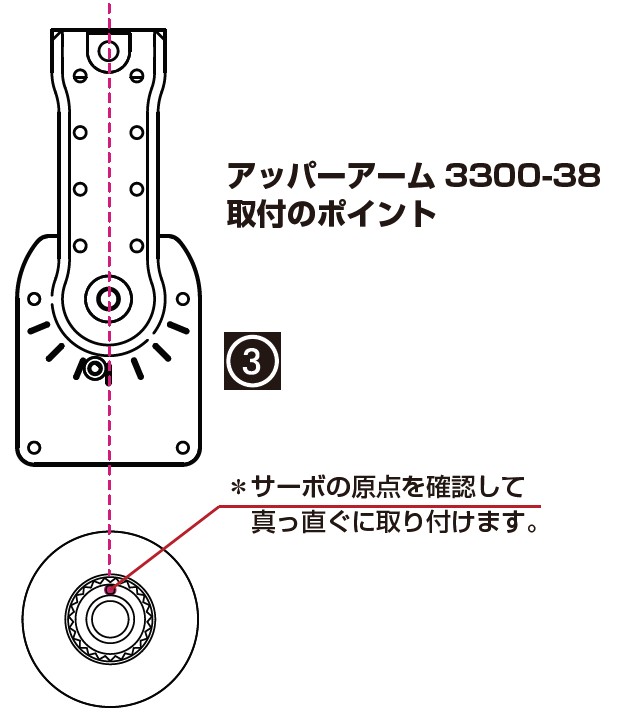
組み立てキットに採用されているKRSサーボの出力軸は、セレーションと呼ばれるギザギザが刻まれています。ここに、サーボアームやサーボホーンを接続し連結していきますが、出力軸に対しパーツがまっすぐニュートラル位置に取り付けられていないと、組みあがった時にズレが発生します。組み立ての際は十分にご注意ください。
多少のズレはトリム調整で修正できますが、5°以上ずれている場合は、対象の箇所を組み直してください。
■トリム調整の手順
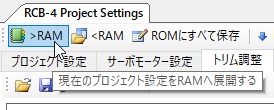
1)プロジェクト設定ウィンドウの「>RAM」ボタンを、2~3回ゆっくりと押します。
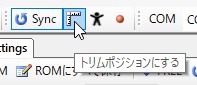
2)ツールバーの「Sync」ボタンを押し、ONの状態にします。下記の画像のように、青い枠がついている状態がONです。
![]()
「Sync」ボタンがONになると、ロボットと常に通信している状態になります。これにより、スライドバーを動かしたときなど、HTH4の操作をそのままロボットに反映することができます。
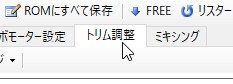
3)プロジェクト設定ウィンドウの「トリム調整」タブを開きます。
4)「トリム調整」タブには、ロボットの全身と同じ数のスライドバーが並んでいます。このスライドバーを動かすことで、各サーボを動かすことができます。
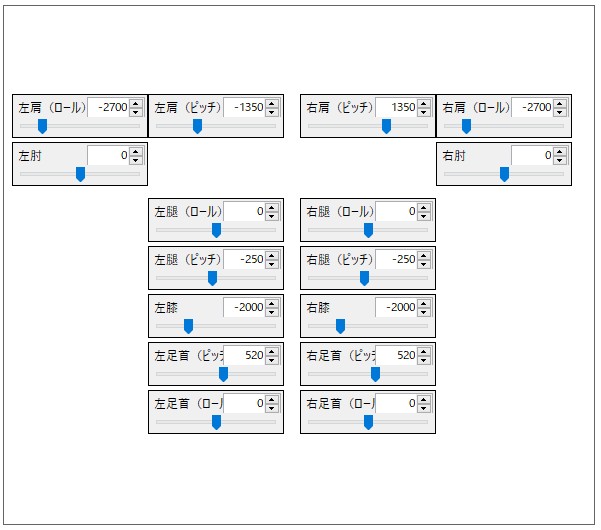
ここからトリムを調整していきます。
適切な姿勢は、各ロボットの組立説明書に掲載されています。以下は、KXR-L2の場合です。

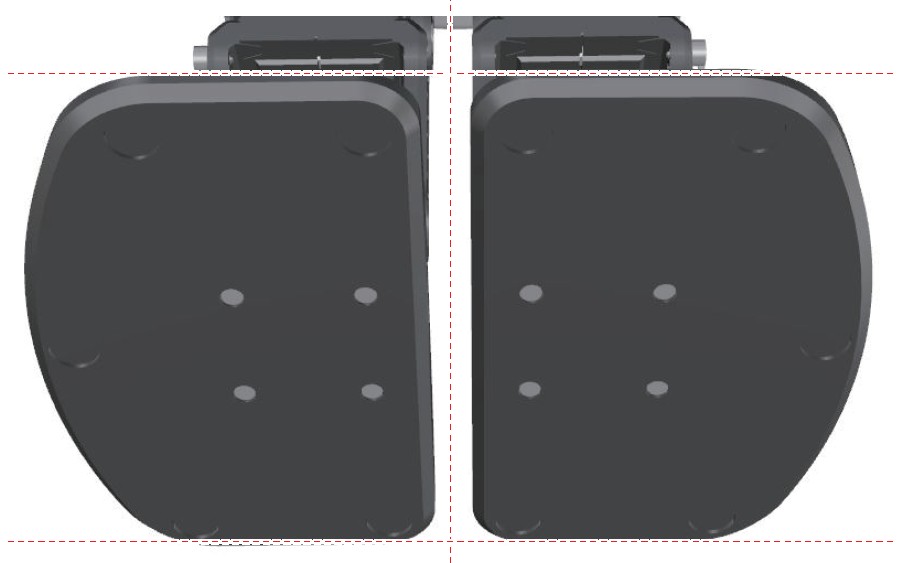
脚がまっすぐになるように調整してください。トリム調整のコツは、片側から調整することです。左右同時に作業すると、適切な位置がわかりづらくなります。また、腰に近いサーボから下へ順番に調整しましょう。
片側が終わったら、もう片方を調整します。その際に、トリム調整が終わっている方を基準にしてください。
トリム調整後、ロボットを立たせたときに、姿勢が前に寄っている、後ろに沿っている場合は、足首の軸のみ調整して、姿勢を正すようにします。
【ご注意ください】
スライドバーを動かすとサーボも連動して動きますが、大きく動かし過ぎてしまうと動作角を超えてサーボが破損してしまう場合があります。トリム調整は、サーボを大きく動かす必要はありませんので、直接スライドバーを動かさず、下記の操作方法でお試しください。
・設定したいサーボの数値の脇にある上下のボタンを押すと、数値が変わります。

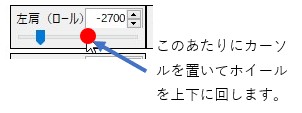
・マウスのカーソルを設定したいサーボのスライドバー、または設定値の上に置き、お手元のマウスのホイールを回転させると数値が変わります。
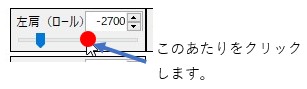
・設定したいサーボのスライドバーで、空いている箇所をクリックすると少しずつ数値が変わります。
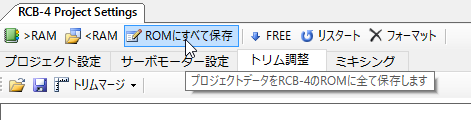
5)トリム調整が完了したら、一度プロジェクトを書き込みます。プロジェクト設定ウィンドウの「ROMにすべて保存」ボタンを押してください。
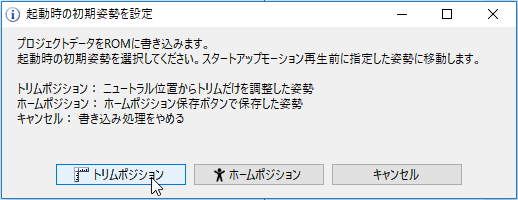
6)確認のダイアログが出ますので、「トリムポジション」ボタンを押します。
7)下記のダイアログが表示されたら、プロジェクトの書き込みは完了です。OKボタンで閉じます。

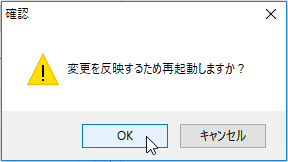
8)プロジェクトを反映させるためには、ロボットの再起動が必要です。再起動の確認ダイアログが表示されたらOKボタンを押してください。
※ロボットの全身の力が一瞬抜けます。ロボットを支えた状態でOKボタンを押してください。
9)ロボットの姿勢を確認します。バランスに問題がなければトリム調整は完了ですが、最終的にはモーションを再生してみて状態を確認します。すぐに転んでしまうようでしたら、再度トリムを調整してください。
【トリムの再調整について】
一度プロジェクトが書き込まれた状態になると、電源投入後にロボットが自動で「ホームポジション」の姿勢になります。この状態でもトリム調整ができますが、脚をまっすぐにした方が左右のバランスを確認しやすくなります。「トリムポジション」ボタンを押すとまっすぐな姿勢になりますので、再度トリム調整をする場合はこのボタンを押してください。
以上でトリム調整の解説は終わります。
次回は、サンプルプロジェクトのモーションを再生します。
次の記事
HeartToHeart4講座(2-4) モーション再生(有線、無線)
HeartToHeart4の詳細をみる KHR-3HV Ver.3.1 リフェバッテリー付きセットの詳細をみる KHR-3HV Ver.3 リフェバッテリー付きセットの詳細をみる RCB-4HVボードのみの詳細をみる RCB-4miniの詳細をみる KHR-3HV Ver.2 リフェバッテリー付きセットの詳細をみる KXR-L2 ヒューマノイド型 Ver.2の詳細をみる KXR-L4T-R カメ型・ローバー型 Ver.2(アカデミックパック)の詳細をみる KXR-A5 アーム型 Ver.2の詳細をみる KXR アドバンスセットA Ver.2の詳細をみる KXR アドバンスセットB Ver.2の詳細をみる