HeartToHeart4講座(1-2) PCとロボットを接続する
前回の記事で必要な製品とソフトウェアが用意できました。この記事では、PCとロボットの接続について解説します。
【関連記事】
第一章
HeartToHeart4講座(1-3) ウィンドウについて
第二章、第三章については下記のページからご参照ください。
■Dual USBアダプターHSのモード

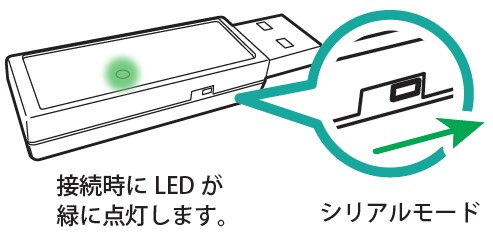
Dual USBアダプターHSは、USB本体のスイッチにより2つのモードに切り替えることができます。
・シリアルモード(緑LED) = RCB-4などボードと通信するモード
・ICSモード(赤LED) = KRSサーボや受信機KRR-5FHなどICSデバイスと通信するモード
USBをPCに接続したときに、本体のLEDが点灯します。色でモードがわかりますので、接続後は必ずどちらのモードになっているか確認してください。
今回は、RCB-4と通信するため「シリアルモード」にします。LEDが緑色に点灯しているか確認してください。
■配線
下記の図のように、シリアル延長ケーブルを中継してPCとロボットを接続します。ケーブルの接続は、向きがあります。受け側とコネクタの爪が合うように接続してください。

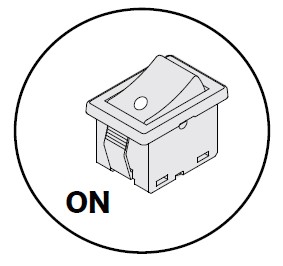
■ロボットの電源をONにするタイミング
PCとロボットが通信する際は、ロボットの電源がONになっている必要があります。しかし、ONのままにしておきますとバッテリーの残量が減っていきますので、通信するまでOFFにしておいてください。
■COM番号の確認方法
Dual USBアダプターHSのドライバソフトをインストールした際に、COM番号を確認していますが、改めて番号の確認方法をご案内します。
1)PCにDual USBアダプターHSを接続します。
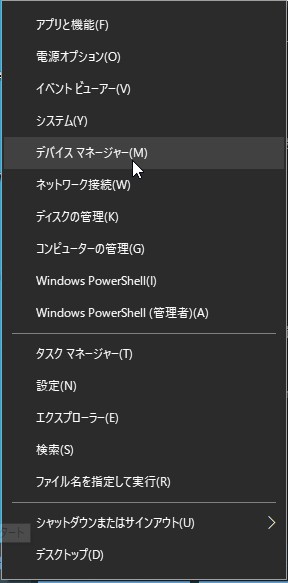
2)Windowsのスタートボタンを右クリックし、デバイスマネージャーを開きます。
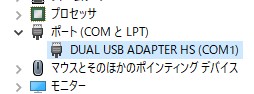
3)リストの中から「ポート(COMとLPT)」を開きます。「DUAL USB ADAPTER(COM●●)」の
「(COM●●)」がCOM番号です。画像では、COM1になっていますが、PCによって番号が変わります。必ずCOM番号を確認し、忘れずにメモをしてください。
以上でPCとロボットの接続は完了です。
次の記事ではHeartToHeart4を利用するために便利な、各ウィンドウについて解説します。
次の記事
HeartToHeart4講座(1-3) ウィンドウについて
HeartToHeart4の詳細をみる KHR-3HV Ver.3.1 リフェバッテリー付きセットの詳細をみる KHR-3HV Ver.3 リフェバッテリー付きセットの詳細をみる RCB-4HVボードのみの詳細をみる RCB-4miniの詳細をみる KHR-3HV Ver.2 リフェバッテリー付きセットの詳細をみる KXR-L2 ヒューマノイド型 Ver.2の詳細をみる KXR-L4T-R カメ型・ローバー型 Ver.2(アカデミックパック)の詳細をみる KXR-A5 アーム型 Ver.2の詳細をみる KXR アドバンスセットA Ver.2の詳細をみる KXR アドバンスセットB Ver.2の詳細をみる