HeartToHeart4講座(3-3) 教示機能でモーション作成2
前回の続きです。
引き続き、モーションの作成方法を解説します。
【関連記事】
第一章、第二章については下記のページからご参照ください。
第三章
HeartToHeart4講座(3-1) ロボットの姿勢と作成ルール
HeartToHeart4講座(3-2) 教示機能でモーション作成1
9.ホームポジションを置く
モーションの最後にホームポジションを置きます。ホームポジションは、サンプルプロジェクト内にある別のモーションからコピペします。
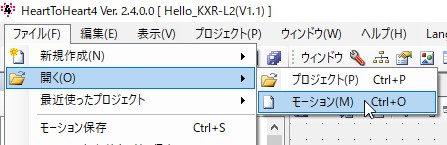
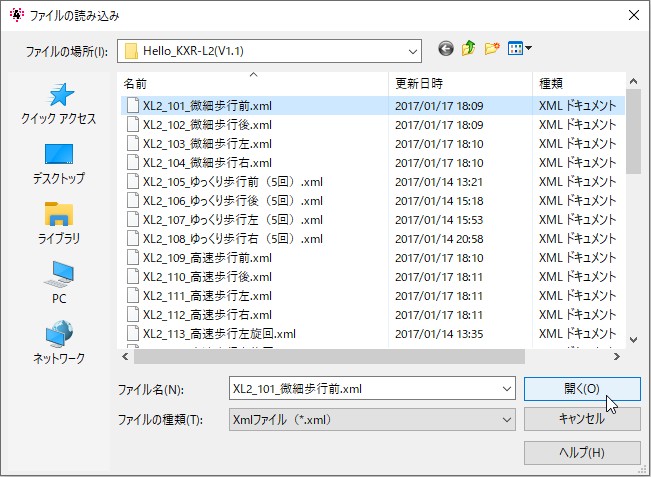
1)「ファイル」メニューの「開く」→「モーション」を選択して「XL2_101_微細歩行前.xml」を開きます。(同じサンプルプロジェクト内であれば、別のモーションでも問題ありません。)
2)開いたモーションの最後にある「ホームポジション」をコピーします。

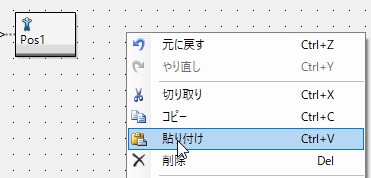
3)作成中の「手を振る」タブに表示を戻し、Pos1の隣に「ホームポジション」を貼り付けます。

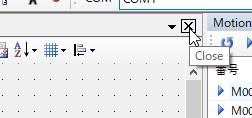
4)モーション編集ウィンドウの右上にある×ボタンで「XL2_101_微細歩行前.xml」を閉じます。保存するかのダイアログが開きますが、特に保存する内容はありませんので「いいえ」ボタンで閉じてください。
10.配線する
3つのPosコントロールを繋げます。
1)モーション編集ウィンドウ内の「接続」ボタンを押します。
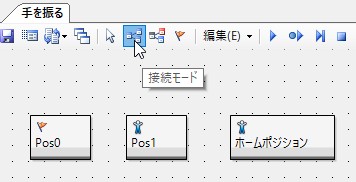
「接続」ボタンがONになると、コントロール同士の配線ができるようになります。
2)「Pos0」を一度クリックし、「Pos1」でもう一度クリックするとコントロール同士が線でつながります。これが配線された状態です。
さらに「Pos1」を一度クリックし、「ホームポジション」でもう一度クリックします。
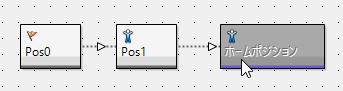
つないだ線の上に矢印があります。この矢印の方向にモーションが進みます。先にクリックした方から、次にクリックした方へ矢印が向きます。クリックする順番で進む方向を指定することができます。
3)カーソルを選択モード(通常モード)に戻すときは、「選択」ボタンを押します。
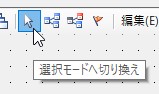
また、キーボードの「Esc」キーでも選択モードに戻すことが可能です。
11.スタートフラッグを付ける
スタートフラッグとは、モーションを開始するコントロールを指定する機能です。Pos0のコントロール上に赤い旗が表示されています。これがスタートフラッグです。
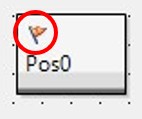
スタートフラッグは、モーション編集ウィンドウに最初に置いたコントロールに自動で割り当てられます。そのため、最初に置いたPos0にフラッグが表示されています。
今回は、Pos0から始めますのでスタートフラッグを変更する必要はありませんが、モーションのスタート地点を変更したい場合は、「フラッグ」ボタンを押してスタート地点にしたいコントロールをクリックします。

12.モーションを再生する
モーション編集ウィンドウ内にある「再生」ボタンを押すと、今作成したモーションが再生されます。

先ほど作成した、Pos0「腕を上げる」→Pos1「腕を拡げる」→ホームポジション「ホームポジションに戻る」の順番に再生されれば成功です。
問題がある場合は、各Posの内容と配線、スタートフラッグの位置を確認してください。
【topic】
先ほど再生した方法は、オンライン再生です。モーション編集ウィンドウ内のコントロールを一つずつ再生しています。これとは別に、以前の記事で解説したモーション一覧ウィンドウからの再生方法もあります。モーション一覧ウィンドウの再生は、実際にRCB-4に書き込まれたモーションデータを再生します。
オンライン再生は、編集中のモーションを一つずつ再生していますので、コントロールとコントロールの間に少し間があり、RCB-4に書き込まれたデータの再生より、動作が遅くなります。動作の検証用としてオンライン再生は便利ですが、実際の動作を確認したい場合は、後で解説するRCB-4へ書き込んでから、モーション一覧ウィンドウより再生してください。特に歩行動作などバランスが伴う動作は、実際に書き込んで再生することをお勧めします。
13.モーションの速度を調整する
オンライン再生で再生してみると、ロボットの動きがゆっくりだったと思います。次の手順では、モーションを再生する速度を少し速く調整します。
1)Pos0をダブルクリックで開く
2)開いたダイアログの左下に「フレーム数」があります。100ほど遅く、数値が小さくなると速くなります。フレーム数を「50」にします。
 =>
=> 
3)Pos0をOKボタンで閉じます。Pos1、ホームポジションも同様にフレーム数を50にしてください。
4)もう一度再生ボタンを押してください。前回より動作が早くなっているはずです。
50より速くすることも可能ですが、速くし過ぎるとロボットがバランスを崩して倒れたり、サーボが指定した角度に達する前に次の動作に移動してしまう場合があります。速度を変える場合は、少しずつ再生しながら指定してください。

一通り、モーションの作成が完了しました。しかし、今の状態ですとまだ腕を上げて降ろすだけですので「手を振る」ような動きにはなりません。手を振るように、連続した動作が必要です。Posを増やせば手を振る動作が可能になりますが、HTH4には繰り返し動作が簡単にできる機能があります。次回は、「Loop」コントロールについて解説します。
次の記事
HeartToHeart4講座(3-4) 繰り返し動作の作成
HeartToHeart4の詳細をみる KHR-3HV Ver.3.1 リフェバッテリー付きセットの詳細をみる KHR-3HV Ver.3 リフェバッテリー付きセットの詳細をみる RCB-4HVボードのみの詳細をみる RCB-4miniの詳細をみる KHR-3HV Ver.2 リフェバッテリー付きセットの詳細をみる KXR-L2 ヒューマノイド型 Ver.2の詳細をみる KXR-L4T-R カメ型・ローバー型 Ver.2(アカデミックパック)の詳細をみる KXR-A5 アーム型 Ver.2の詳細をみる KXR アドバンスセットA Ver.2の詳細をみる KXR アドバンスセットB Ver.2の詳細をみる