RCB-4起動時に、回転モードのKRSサーボを動作させない方法
RCB-4(HV/mini)で回転モードのKRSサーボを使用した場合、RCB-4の起動時にサーボが勝手に2、3秒間回転してしまう症状が発生します。これは、RCB-4が起動と同時に各サーボへトリム位置、またはホームポジションの位置へ移動するよう指示を出すため、回転モードのサーボがそれを回転動作指示と認識するためです。
RCB-4には起動時の動作をキャンセルする方法がありませんが、下記の通り設定すると回転せずに起動することができます。回転モードのサーボをご利用の際は、ぜひお試しください。
1.ICSマネージャでサーボの「スピード」を1に設定する。
サーボの設定を変更できる「ICS3.5/3.6 Manager software」を使用し、サーボの「スピード」を1に設定します。これにより、動作指示を受けても回転しないようになります。
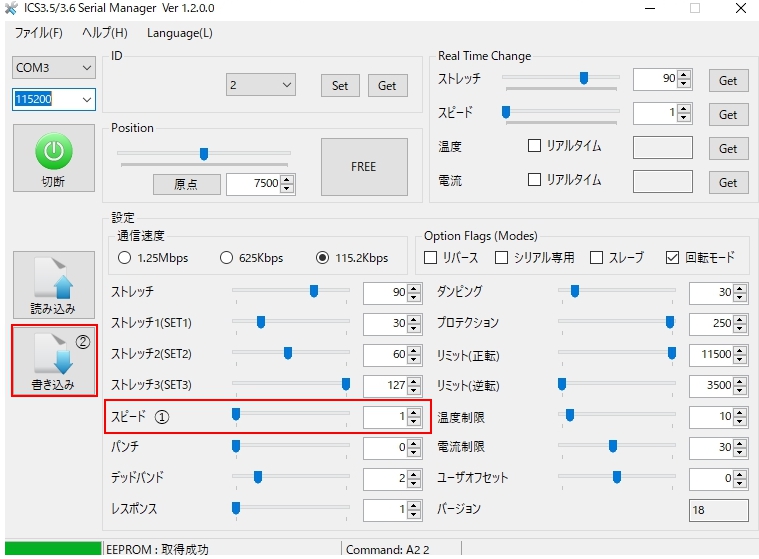
サーボの設定が読み出されている状態で、画像①の「スピード」を1に設定し、②の書き込みボタンで設定を書き込みます。こちらは、KRS-3301を例にしています。サーボのより、読み出された各パラメータが異なります。
「ICS3.5/3.6 Manager software」の使用方法は、付属のマニュアルをご参照ください。
2.HeartToHeart4の「スタートアップモーション」で指定しているモーション内に、サーボの「スピード」を設定するコントロールを追加する。
HeartToHeart4の「ServoParam」コントロールは、サーボのスピード、ストレッチパラメータを設定することができます。こちらを使用して「スピード」を設定します。最大127まで指定できますが、サーボの元の設定値と同じ数値にしておくとサーボに無理なく使用できます。
このコントロールは、RCB-4起動後のトリム位置、またはホームポジションの位置へ移動する指示の後に実行されるため、勝手に回転しないタイミングで最適な「スピード」パラメータに変更し、以降は通常通りサーボを動かすことができます。
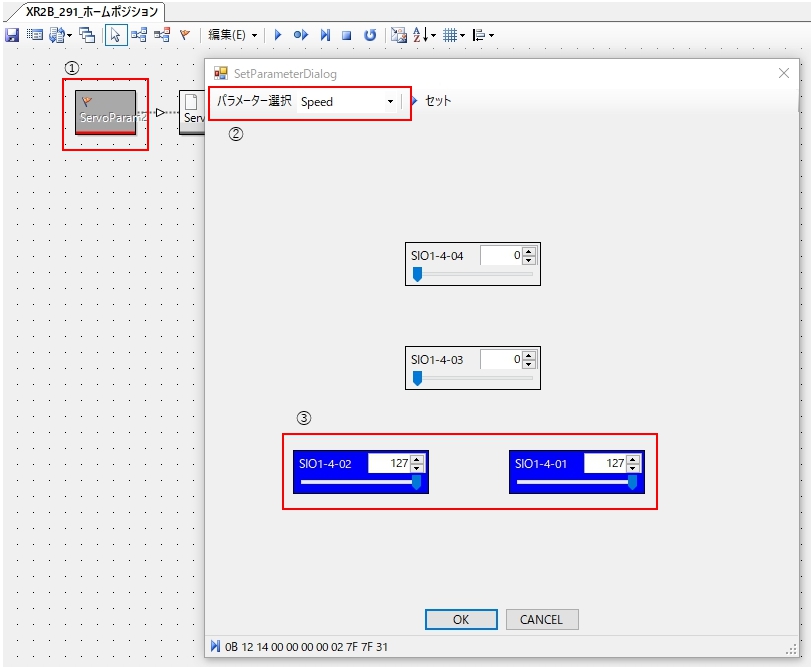
画像①の通り「ServoParam」コントロールを1つ配置し、②パラメータ選択を「Speed」に設定した状態で、③回転モードのサーボのパラメータを指定します。画像は、KXR-R2Bのサンプルプロジェクトを例にしています。
HeartToHeart4の詳しい使用方法は、付属のマニュアル、または『HTH4講座』をご参照ください。
以上で作業は完了です。モーションを改めて書き込んだ状態でRCB-4の電源を入れ直し、起動時にサーボが回転しなかったら成功です。念のため、各モーションを再生して正常に動作するかご確認ください。