B3Mシリーズ使い方(B3M-SB-1040-A)
【B3Mサーボモータを動かすために必要なもの】
B3Mサーボモータには、制御用のマイコンとモータを駆動するドライバが内蔵されています。そのため、本体への通信のみでサーボの制御や各パラメータを変更できます。
外部にモータドライバ等別途用意する必要はありません。
必要なものは、「PC通信を行うためのUSBアダプタ、ケーブル」と「サーボモータを駆動するための電源」のみです。
※サーボとUSBアダプターを接続するためのケーブルは本体とセットになっています
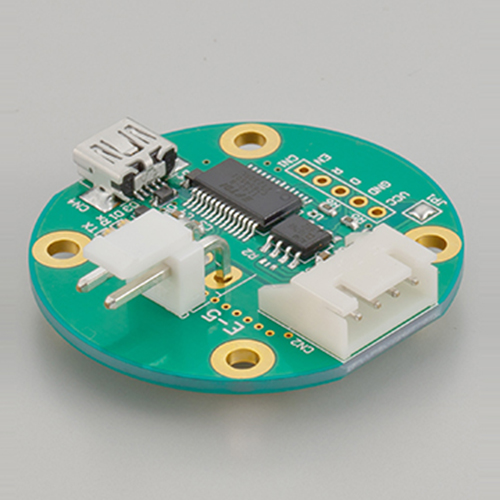
USBアダプターには、USB端子のほか、マイコンから通信するためのUART端子も備えています。
※USBケーブルは別売です。PCから通信する場合は、市販のA⇔miniBタイプのケーブルをご用意ください。
・電源(6~12V:12V推奨)
容量は接続するサーボの数と制御内容によりますが、5個前後で5A必要です。
USBアダプターに電源端子がありますので、こちらからサーボに電源を供給することが可能です。
常に負荷がかかったり俊敏な動作をさせる場合は、モータのストール電流(最大電流)をご確認ください。
【接続方法】
サーボ同士を接続するマルチドロップ接続が可能です。一つのラインに7、8個までつなぐことができます。

数十個接続する場合は、ハブを使用してください。

B3Mを制御するまでの準備については、以下のサポート記事に詳しく紹介されていますのでこちらをご参照ください。
■サポート記事『B3Mサーボモータを動かそう(準備編(1))』
【制御方法】
PCまたは、マイコンからUSBアダプター経由でコマンドを送り制御します。
制御するために必要なコマンドは6つのみです。
<LOAD>
ROMの内容をIOマップ(RAM)に読み出します。
<SAVE>
IOマップ(RAM)の内容をROMに保存します。
<READ>
IOマップ(RAM)のアドレス指定でデバイスからデータ(RAM)を読み込みます。
<WRITE>
IOマップ(RAM)のアドレス指定でデバイスにデータ(RAM)を書き込みます。
<RESET>
デバイスを再起動します。
<POSITION>
サーボモータの動作角を指定します。
PCからB3Mサーボモータへアクセスするコマンドは少ないのですが、これらのコマンドをより簡単にプログラムできるよう、ライブラリを作成し無償配布しています。以下からダウンロードしてご利用ください。
また、コマンドの作成や制御パラメータについての情報は、ソフトウェアマニュアルに全て記載されています。
制御方法の詳細に関しましては、以下のサポート記事をご覧ください。
■サポート記事『B3Mサーボモータを動かそう(C#下準備編)』
■サポート記事『B3Mサーボモータを動かそう(C#位置制御編)』
【サーボの組み込みについて】
サーボの組み込みに便利なフレームを各種ラインナップしています。これらを使用することでニーズに合った形に組み合わせることが可能です。
※B3M-1000シリーズのケースサイズに合わせたフレームです。B3M-SC-1170-Aには使用できません。
・サーボアーム【B3M-1000シリーズ用】(2セット入り)

・サーボブラケットS【B3M-1000シリーズ用】(2セット入り)

・サーボブラケットB【B3M-1000シリーズ用】(2セット入り)

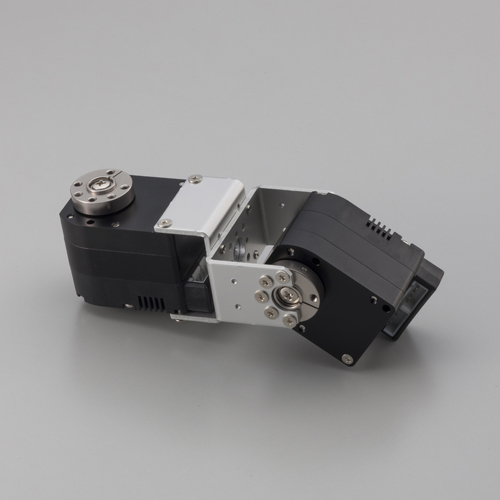
■使用例


独自にフレームを開発するための寸法図も公開しています。
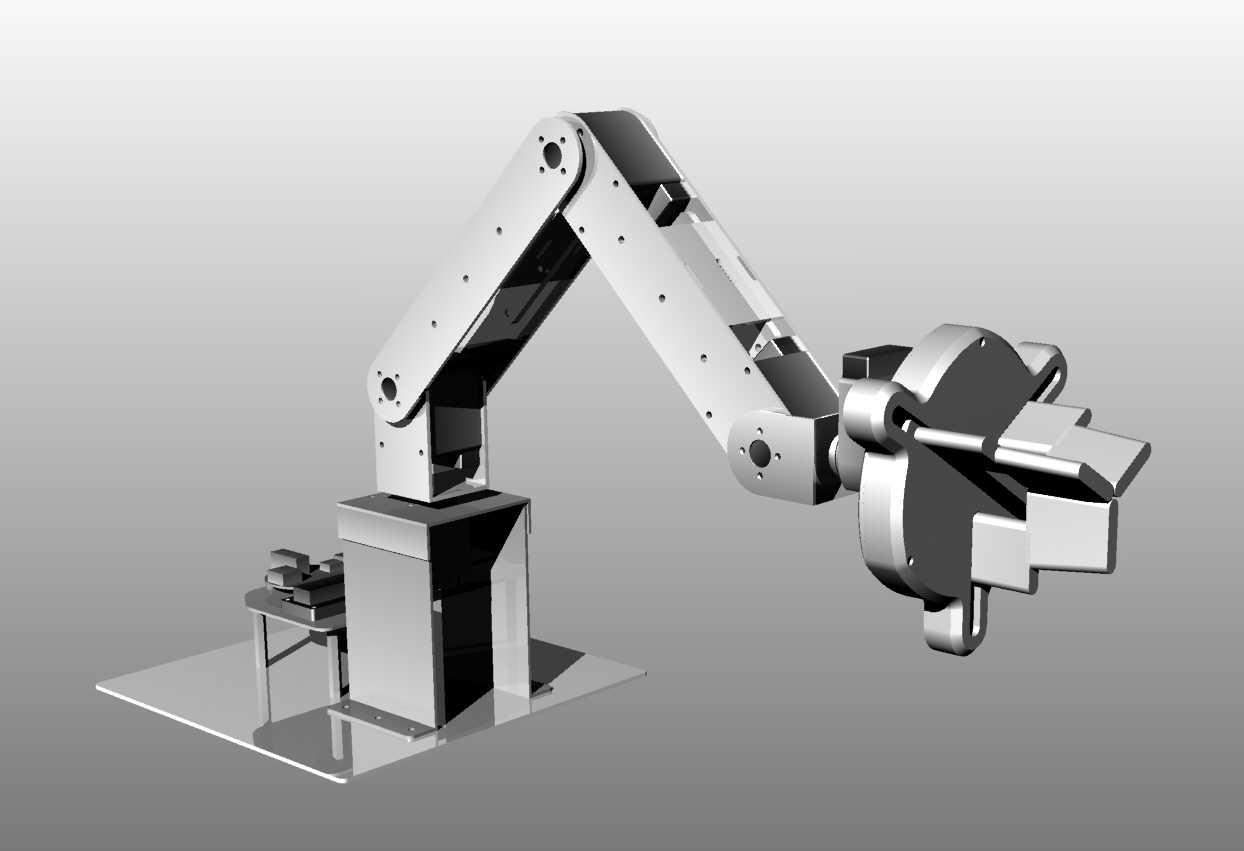
【搭載例】
B3Mサーボを使用したアームロボットの情報を公開しています。設計データをダウンロード可能ですので開発の参考にご利用ください。