
加速度センサーを搭載する
KXR-L2 ヒューマノイド型は、加速度センサーを搭載することで転倒した際の姿勢を検知することができ、自動で起き上がり判定ができるようになります。今回は、加速度センサーの搭載と設定の方法をご紹介します。
※KRG-4ジャイロセンサーも搭載する場合は、こちらを参考に先にジャイロセンサーを搭載してください。
2017.3.22 KXR-L2のサンプルプロジェクトを一部変更しました。
今回のブログはV1.1のモーションをベースに解説しますので
こちらからダウンロードしてご利用ください。
こちらの内容は、以下のPDFでもご覧いただけます。
■必要なパーツ

必要なケーブルが付属していますので、準備はこちらのセットのみでOKです!
■加速度センサーの効果
加速度センサーは「加速度」(時間当たりの速度の変化量)を検出するセンサーです。重力加速度のみを検知することで、地面に対しての傾きが計測できます。
ジャイロと同じように傾きを検知する用途になりますが、加速度センサーは「現在どれだけ傾いているか」という静的な検出を、ジャイロ(角速度)センサーは「どちらの方向にどれだけ動いたか」という動的・瞬間的な検出が得意で、役割が異なります。
KXRでは、加速度センサーを使用することで転倒した際に「仰向け」か、「うつぶせ」か、または「左右横向き」に倒れたかを判断し、自分で起き上がりモーションを判断して再生できるようになります。
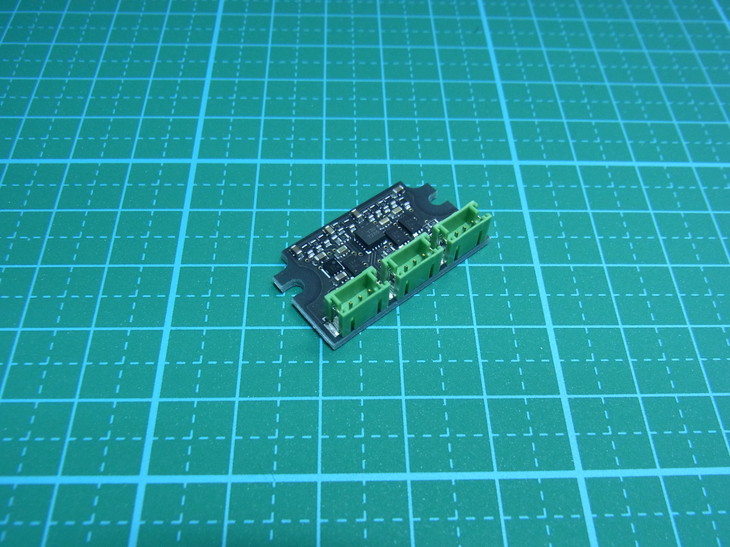
使用するRAS-3は3軸の加速度センサーですので、3方向の加速度を検出できます。
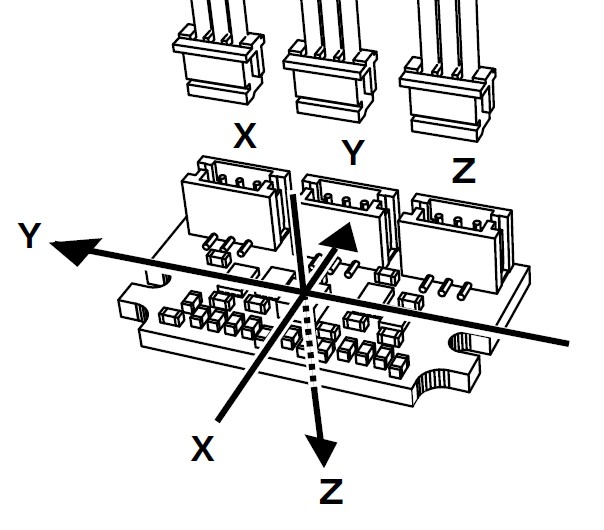
基板上に3つのコネクタがありますが、それぞれのコネクタに各方向の加速度の値が出力されます。RAS-3の詳細な情報はこちらのマニュアルをご覧ください。
それでは、加速度センサーをKXRに搭載してみましょう!
■搭載方法
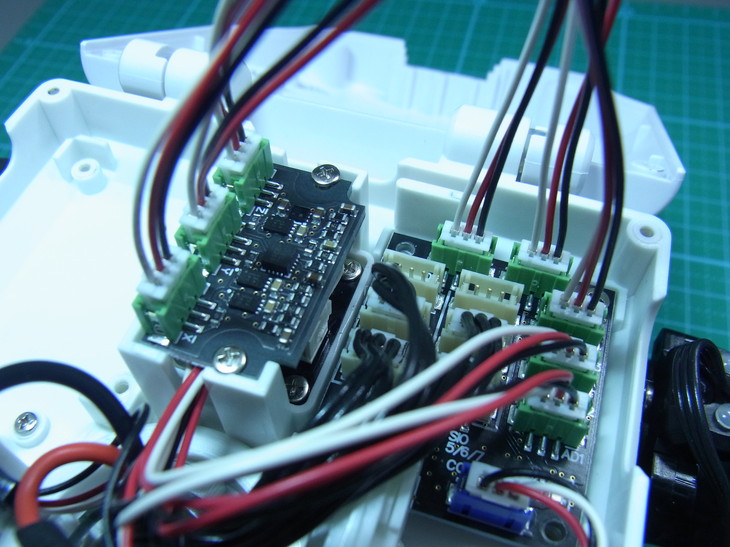
バックパックの中央部分に専用の搭載スペースがありますので、ジャイロにかぶせるようにここにビス止めします。ビスはKXRの組み立てで余ったM2-6ビスを使用します。
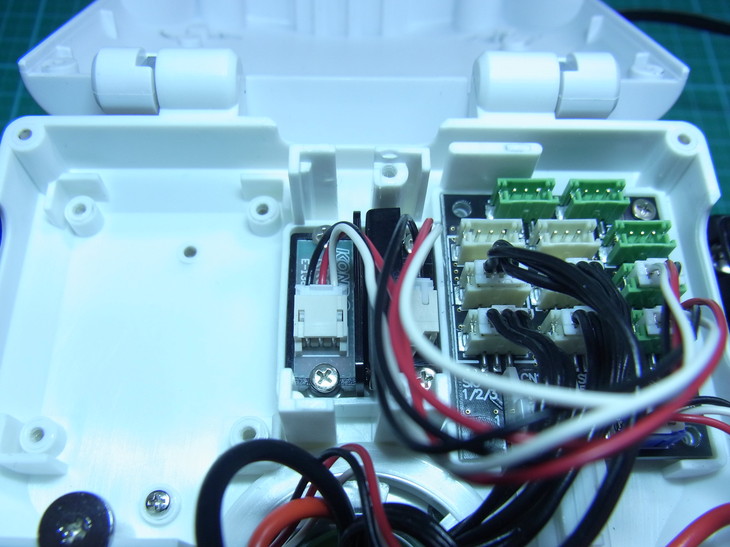
1)ジャイロのケーブルを挟まないように下の溝に通し、加速度センサーをかぶせます。上下2か所にM2-6でビス止めすれば固定は完了です。

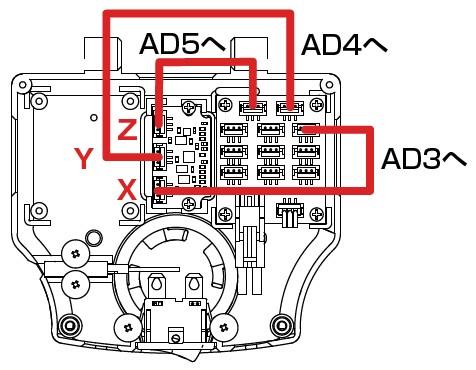
2)RAS-3付属のケーブルをRCB-4miniのADポート3、4、5に接続します。下側のコネクタ(X)をAD3へ、真ん中をAD4へ、上部のコネクタをAD5へ接続してください。
以上で搭載は完了です。ジャイロよりさらに簡単ですね!
次に設定方法です。設定にはHeartToHeart4を使用します。
■設定方法
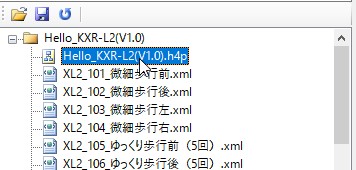
1)HeartoHeart4を起動し、サンプルプロジェクト『Hello_KXR-L2(Vx.xx)』を展開します。展開するためには、プロジェクトブラウザウィンドウのフォルダ内にある.h4pのファイルをダブルクリックします。
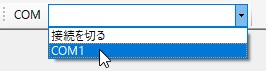
2)COMポートの番号も指定してください。
※COM番号はご利用のPCによって異なります。詳細はKO Driver付属のマニュアルをご参照ください。
3)Syncをアクティブにします。

4)プロジェクトブラウザウィンドウから「XL2_117起き上がり(方向判別).xml」をダブルクリックで開きます。
5)このモーションは、加速度センサーの値によってロボットの動きを自動で切り替えます。モーションは完成していますので、ここではセンサーの値が正しく検出できるか確認しましょう。
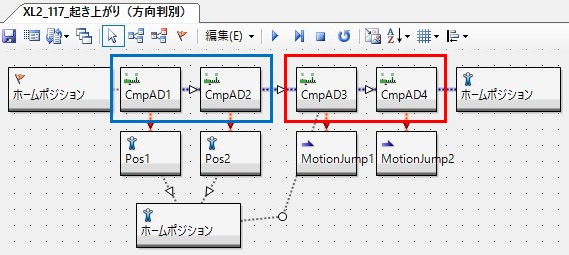
CmpADのコントロール(パネル)は、接続したセンサーの値によって分岐する機能があります。
「CmpAD」とは「Compare AD」の略で、設定した値とセンサーからの実測値を比較した結果によりモーションの分岐を制御できます。
青枠のCmpADは、AD3の値を読んでいます。AD3はロボットの左右方向の加速度を検知しますので、ロボットが横向きに転倒した場合に分岐します。
赤枠のCmpADは、AD5の前後方向を検知しています。それぞれ、仰向け、うつ伏せの場合に対応したモーションを再生するよう設定しています。
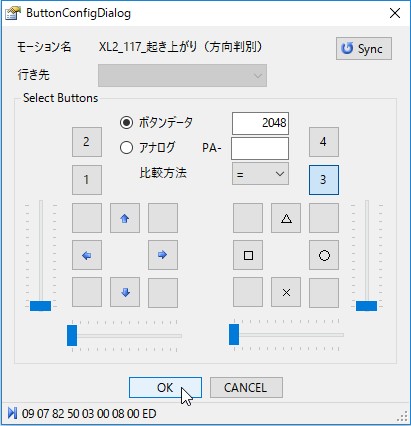
うつ伏せの際に分岐するCmpAD3をダブルクリックすると以下の画面になります。
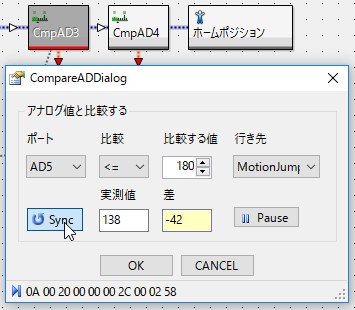
これは、「AD5のセンサーの値が180以下だったら指定したモーションに分岐する」という設定です。実際にロボットをうつ伏せにしてSyncボタンを押してください。実測値が180以下になっていればモーションが再生されます。
値を確認したら「CANCEL」ボタンで閉じます。
さらに、仰向けの場合は以下のようになっています。
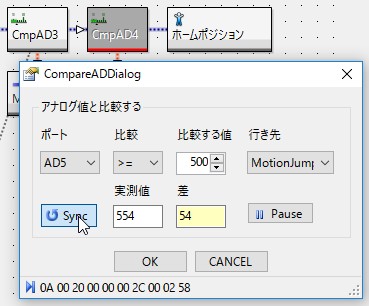
今度は「AD5の値が500以上だったら指定したモーションに分岐する」という内容です。
こちらもSyncを押して500以上の実測時になるか確認してください。
値を確認したら「CANCEL」ボタンで閉じます。
ここまで確認ができましたら完了です。
6)最後にコントローラーのボタンを割り振ります。サンプルでは、仰向け、うつ伏せにそれぞれボタンを割り振っていましたが、それらをすべて解除し「XL2_117起き上がり(方向判別).xml」をシフト3に割り付けてください。
※ボタン登録については、HeartToHeart4ユーザーズマニュアル p.36をご参照ください。
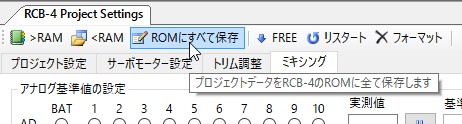
7)ボタン登録完了後にプロジェクトウィンドウの「ROMにすべて保存」ボタンでロボットにモーションをすべて登録してください。
以上で加速度センサーの設定は完了です!
ROMにすべて保存が完了したら起き上がりモーションを再生してみてください。自動で起き上がりの、仰向け、うつ伏せが切り替わりましたら成功です。
もし再生されない場合は、配線や設定が間違えている可能性があります。もう一度初めの手順から確認をお願いします。
8)各ウィンドウを閉じる前にモーションとプロジェクトも保存してください。
加速度センサーやCmpAD機能は、起き上がり以外にも使用できます。また、RCB-4miniへの接続先も自由に変更できますので、オリジナルロボットを組み立てた時はぜひお試しください。
以上です!