
KXR-R4LL ローバーLL型の紹介
ボーナスパーツのホイールスペーサーを使用することでKXR-R4LL ローバーLL型の作成が可能になします。
今回は、このKXR-R4LLについてご紹介します。
2018.4.4追記
KXR アドバンスセットA/Bでこのロボットを組み立てる場合、下記のパーツが追加で必要です。
■ホイールスペーサーとは

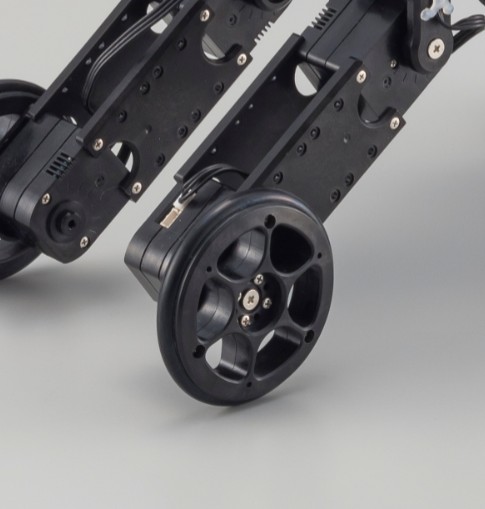

ホイールスペーサーは、サーボホイールとサーボの間に挟むスペーサーパーツです。
これまでは、KXR-L4RのようにアームサポーターBとサーボホイールの組み合わせのみ可能でしたが、スペーサーを挟むことでジョイントフレームやフラットフレームを組み合わせることが可能になり、構成の自由度が向上しました。
{kind=link}
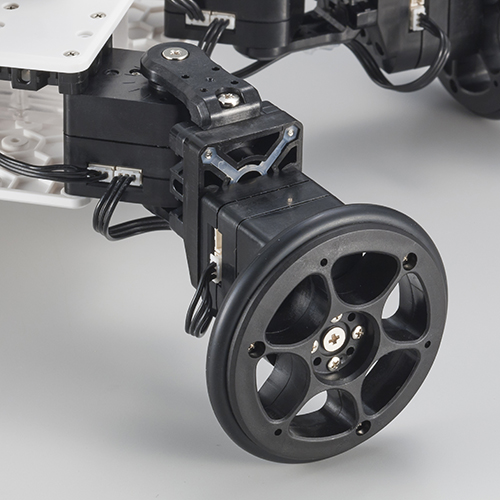
KXR-R4LLでは、サポーターBとフラットフレームの活用例をご紹介します。
■必要な製品
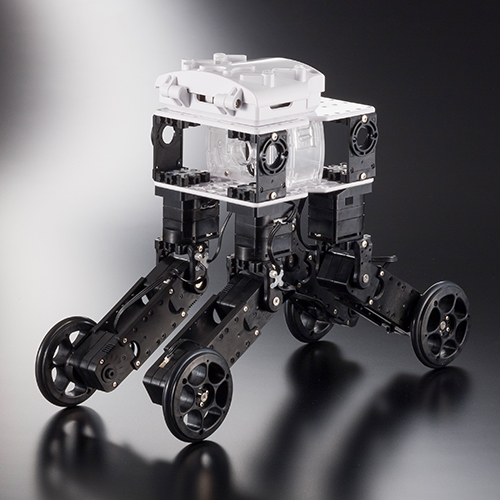
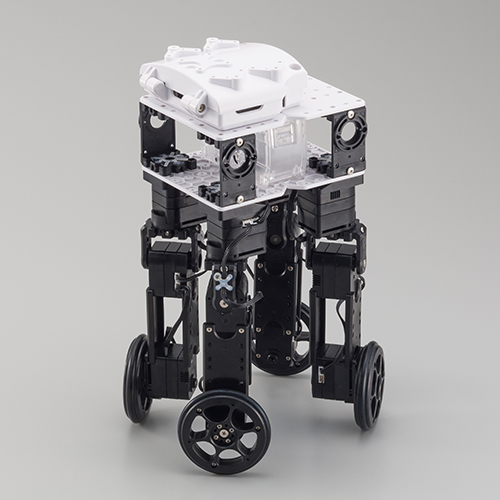
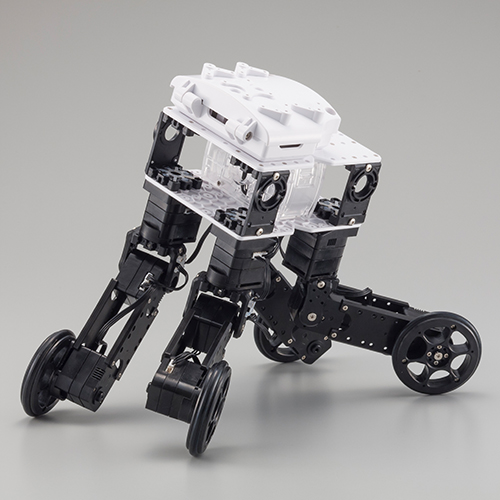
■概要
KXR-R4LL ローバーLL型のLLはロングレッグの略です。文字通り脚の長いローバーで、関節にサーボが入っていますので車高をリニアに変えることができます。これを利用して、段差のある場所も楽々と移動することが可能です。
また、ヨー軸を利用してタイヤを前方向から90°旋回することができ、その場旋回や横移動も可能です。
さらに、脚を斜めに向ければスラロームで移動することもできます。
■動画
■組立説明書
■サンプルプロジェクト
2017.9.26 サンプルプロジェクトを修正しました。
※無線コントローラのS3を押すと横移動モードになります。そのまま←、→を押すことで左右に移動できます。
※電源投入時にタイヤが回転しますので、必ず地面からタイヤを浮かした状態で電源をONにしてください。
■おすすめオプション

・無線送信機:KRC-5FH (1セット)
手元のコントローラーでボタン操作によるロボットの無線操縦が可能になります。セットには受信機が付属していますので、こちらのセットのみで無線化に対応します。
搭載方法は、KXR-L2と同じですのでこちらをご覧ください。