Auto Chasing Turtle のご紹介
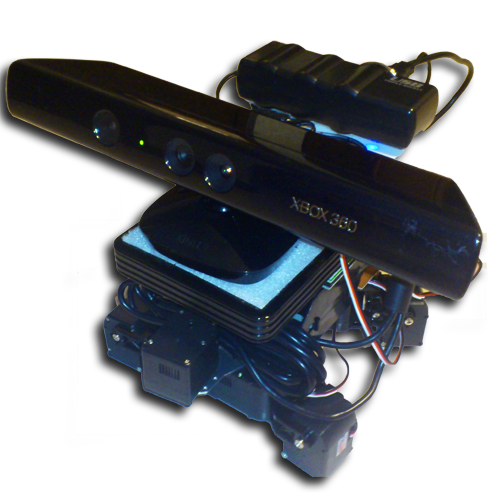
新里様作成のロボット”Auto Chasing Turtle”が世界各社紙面、websiteで取り上げられています。このロボットの本体は以前発売されました”KONDO ANIMAL”カメ型ロボット01を使用し、背中にはbeaglebord-xMやKinect、無線LANルーターなどが搭載されています。
Kinectで周囲を立体的に観察し人間の顔を判断するほか、iPadでリアルタイムに映像を見ることも可能です。

ロボットは、顔を認識するとそこへ到達するための距離を測ります。 次に、目的地までのルートを検討し自動で歩行します。 ロボットとボードの接続には、beaglebord-xMのUSB端子にロボットキット付属のシリアルUSBアダプターHSを接続してRCB-3HVへつないでいます。 判断はbeaglebord、動作はRCB-3HVと役割分担をすることで制御をシンプルにしています。
詳細は下記のアドレスより紹介ページをご覧下さい。(外部リンク)
http://www.siprop.org/ja/2.0/index.php?product%2FAutoChasingTurtle