B3Mサーボモータを動かそう(準備編(1))(改訂版)
●B3Mサーボモータを動かすための簡単な解説をします
B3Mサーボモータを購入して動かすところまで解説します。
今回は、B3Mサーボモータを動作させるための周辺機器、通信の確立方法までを解説します。
(詳細な動かし方に関してはB3M_SoftwareManualをご覧ください。)
【関連記事】
第5回 B3Mサーボモータを動かそう(Arduino制御編)(改訂版)
第6回 B3Mサーボモータを動かそう(Python編(1))(改訂版)
●B3Mサーボモータを動かすために必要な周辺機器
・RS-485 USBアダプターHS + HC-6P/XH変換ケーブル

PCのUSBからRS-485対応機器と通信するためのアダプターです。PCからコマンドを送信し、接続されたB3Mサーボモータを動かします。PCと接続する場合は、デバイスドライバ(KO Driver)のインストールが必要です。インストール方法はKO-Driverのマニュアルをご参照ください。

RS-485 USBアダプターHSはPMXシリーズに採用されている6ピンタイプのコネクタを実装しています。B3Mシリーズの4ピンコネクタに変換するため「HC-6P/XH変換ケーブル(200mm)」をご用意ください。
・B3Mシリーズのサーボモータ

B3Mサーボモータの種類に依らず、同様の手順で動かすことができます。
・電源
B3Mサーボを動かすためには、別途6~12(推奨9~12)Vの電源が必要です(低電圧では出力も低下します)。最大出力で動作させるためには電流容量の大きい電源が必要です。機種にも依りますが、サーボ1個あたり最大で約6A必要です。
RS-485 USBアダプターHSに付属する電源分配基板(6pin端子)経由で電源を供給できます。供給には電源ケーブルAを用いると簡単に接続できます。※RS-485 USBアダプターHSに電源ケーブルAは付属されています。
弊社LiFeバッテリー(3セルタイプ)でも動作可能です。リチウム系のバッテリーですので、電圧を監視し、過放電等に注意する必要があります。バッテリーと接続する場合はこちらの製品がお勧めです。
・B3M用の接続ケーブル

B3Mサーボ同士をデイジーチェーン接続する際にXH接続ケーブルを使用します。サーボ本体のセットに400mmのケーブルが1本付属しています。
・Windows搭載のPC (Windows10以降)
B3MサーボモータはWindows OSのPCで動作するB3M Manegerソフトウェアを用いる事で簡単に動作確認や設定変更ができます。また、WindowsPCで作成したプログラムでサーボを動かすこともできます。プログラムについては第三回以降で説明します。
マイコン等他のデバイスからも動かせます。詳細はB3M_SoftwareManualをご覧ください。
・ B3M Maneger
B3Mサーボモータのパラメータを簡単に設定をするためのソフトウェアです。こちらからダウンロードできます。
圧縮されていますので、任意のフォルダに解凍します。中の実行ファイルを実行するとB3M Maneger起動することができます。使用方法については次回の記事で解説します。
●接続方法について
接続方法については下記のようになります。
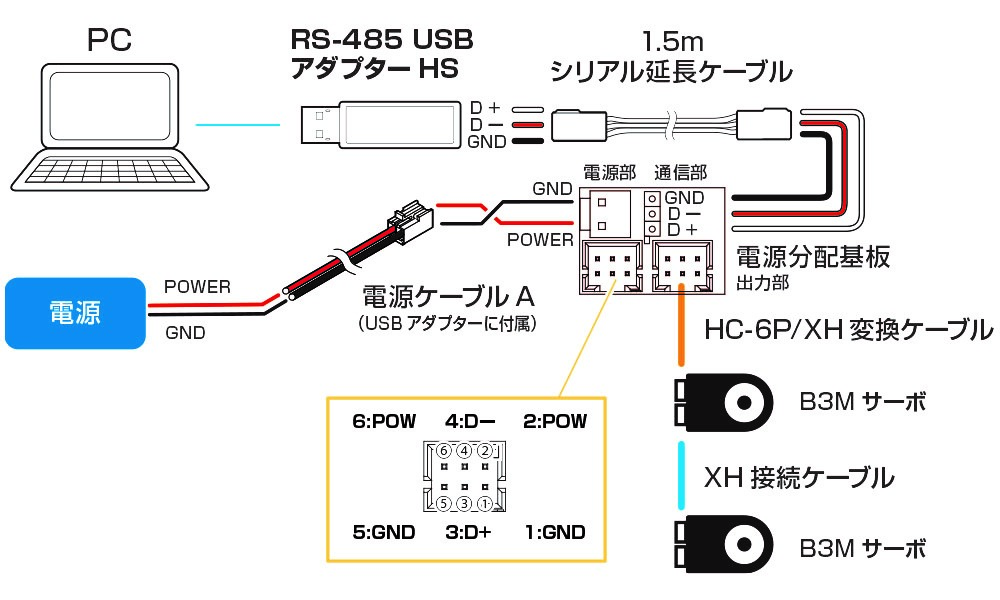
B3Mサーボモータはマルチドロップで複数接続することが可能です。複数のB3Mサーボモータを接続するため、各サーボモータに固有の番号(ID)を割り振ります。
●B3M Manegerを用いて通信の確認をする
動かす前にまず通信が確立しているか確認を行います。B3Mサーボモータは製品出荷時はID:0,通信速度:1.5M(1500000)bpsです。
①B3Mサーボモータ1つとPCをRS485 USBアダプターHS経由で接続します。
電源コネクタも接続しますが、まだ電源はいれません
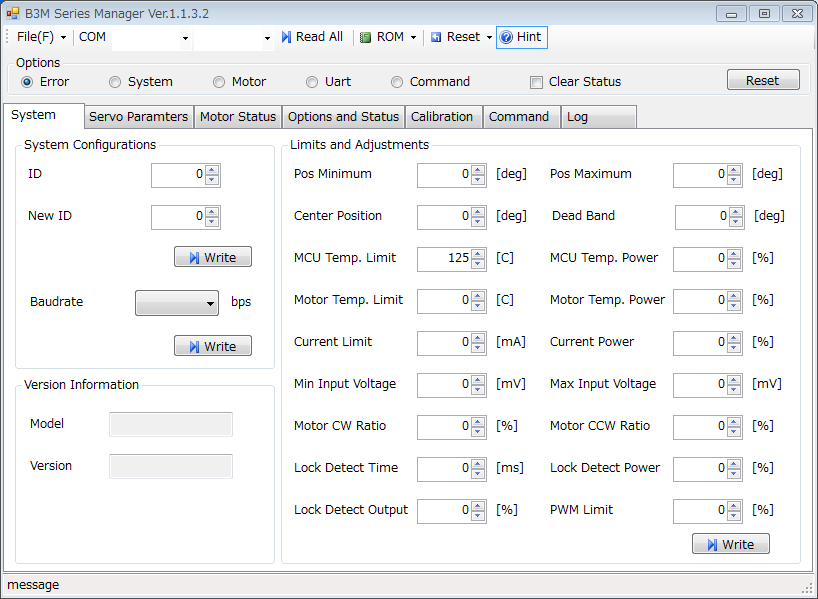
②B3M Manegerを起動させます。
③電源を入れると、B3MサーボモータのLEDが点灯します。
(機種により点灯色は異なります。)

④B3M Manegerの左上のCOM欄にRS-485 USBアダプターHSに割り当てられているCOM番号を指定します
COM番号を確認するには、KO-Driverのマニュアルをご確認ください。
(下記図のCOM番号は例としてCOM11番を指定しています。)
⑤COM番号の隣の通信速度欄のプルダウンメニューで通信速度1500000を選択します
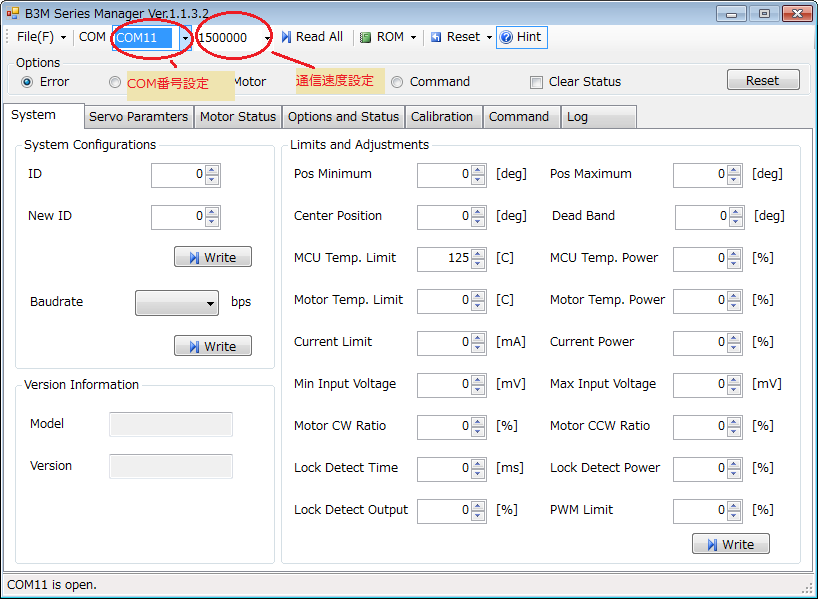
⑥次にReadALLボタンを押します
接続に成功した場合はID:0に設定されているB3Mサーボモータのデータが取得され、各項目に数値が自動で入力されます。(下記はB3M-SB-1040-Aの初期状態を読み込んだ図です)
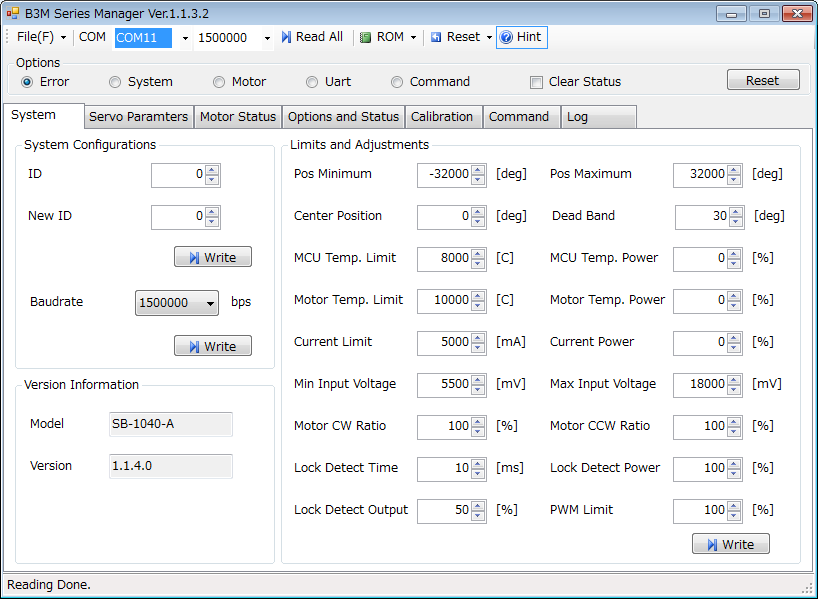
失敗した場合は、左下にメッセージエラーが出ますので、それをもとに確認をします。
今回は、必要な周辺機器と接続方法を解説いたしました。
次回は、B3M Manegerを用い、実際に指定した角度に動かす方法を解説いたします。
B3M-SB-1040-Aの詳細をみる B3M-SC-1040-Aの詳細をみる B3M-SC-1170-Aの詳細をみる