HeartToHeart4 ver2.0.0.0 公開
HeartToHeart4 Ver2.0を公開いたします。Ver.2.0ではほぼ全ての面で見直しが行われ、快適な操作感を実現しました。主な変更内容は以下の通りです。なお、ダウンロードはこちらから行えます。
<メイン画面>
- プロジェクト設定画面とPosコントロールのSyncボタンをメイン画面に移動しました。そのため、SyncをONの状態のまま作業が可能になりました。
- ホームポジションボタン、トリムポジションボタンが追加され、ワンクリックでポーズの変更が可能になりました。
<モーション編集画面>
- アンドゥ・リドゥが可能になりました。
- 接続ラインのデザインが一新され見やすくなりました。また、接続ラインに折れ点(アンカー)が付けられるようになりました。
- 複数のコントロールを同時に選択して、移動、拡大・縮小できるようになりました。
- コントロールの色、名称、大きさなど簡単に変更できるようになりました。
- 多くのメニューがショートカットキーで呼び出せるようになりました。
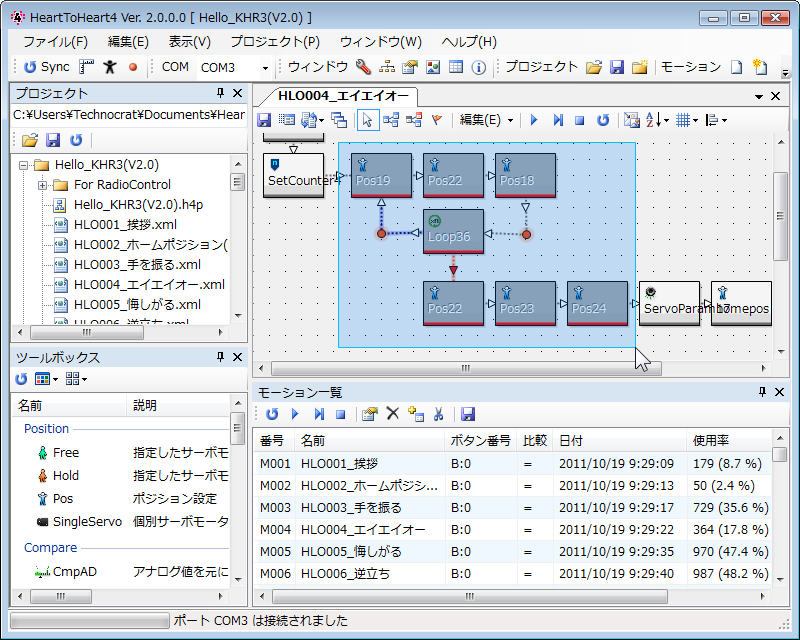
<モーション一覧>
- 登録可能なモーションの数が、50から120になりました。
- 登録可能なボタンデータの数が、25から32になりました。
- モーション使用率が表示されるようになりました。
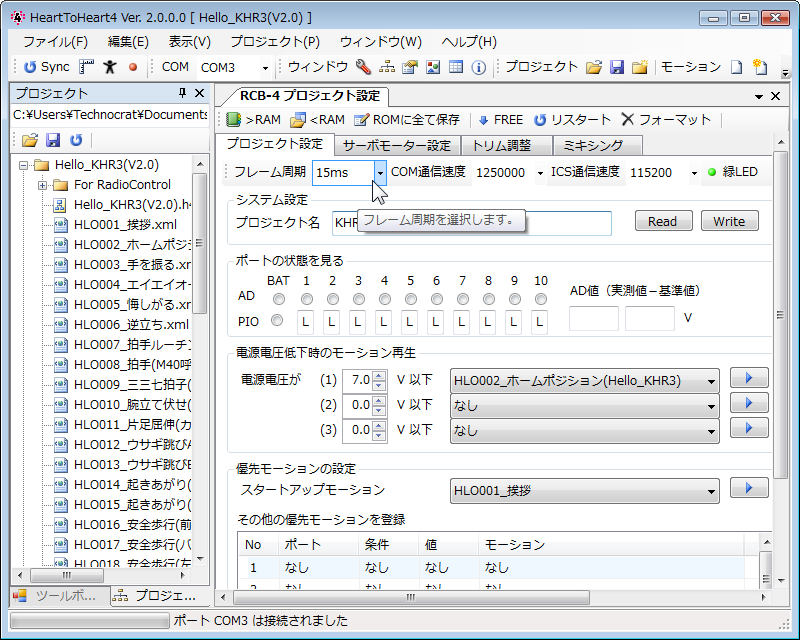
<プロジェクト設定画面>
- 「プロジェクト設定」「サーボモーター設定」「トリム調整」「ミキシング」がそれぞれタブで画面が分割され、セッティングしやすくなりました。
- プロジェクト名をロボットに書き込み・読み出しができるようになり、ロボットに書き込んだプロジェクトがわかるようになりました。
- 指定した電圧を下回った場合に自動的に再生するモーションを3つ選べるようになりました。
- 任意の項目と閾値を選択して再生する、優先モーションを10個選べるようになりました。
- スタートアップモーションを「プロジェクト設定」で選べるようになりました。
<コントロール>
▼下記のコントロールが追加になりました。
- “Anchor” モーションの途中にアンカー(目印)を挿入することで、モーション途中へモーションジャンプできます。
- ”Timer”、”CmpTmr” タイマーをセットして指定した時間になると分岐します。
- ”Anystring” 任意の文字列をCOMから出力することで、ロボットがメッセージを発生できるようになりました。
- ”Calc” トリムデータやポジション、ミキシング倍率などメモリー上の変数に演算します。
- “CmpValue” ユーザー変数やLoopカウンター値で分岐できます。
- ”GetValue” 任意のデータ(サーボポジションやトリムデータ、ADなど)のデータを取得します。取得結果をCOMポートから出力することも可能です。
- “Restart” ロボットをモーション中で再起動します。
- “SetValue” サーボポジションやトリムデータ、ユーザー変数などを直接書き換えられます。書き換えられたデータは即座に反映されます。
- ”StickMix” アナログスティックコントローラーの値でサーボのポジションをミキシングします。
- “URemix” ユーザー変数に適当な倍率をセットし、サーボモーターにミキシングを掛けることができます。
- “Swap” ユーザー変数やカウンター値を入れ替えることができます。
- “Wait” タイマーを使って、セットした時間だけ“何もしない”ことができます。サーボモーターは現在位置を保持します。
▼”POS”に関して下記の内容を変更しました。
- 新規のPOSが前に編集していたPOSの内容を自動で反映するようになりました。
- POS画面のボタン配置がHeartToHeart3と同じになりました。
- 「分割機能」が使えるようになりました。
- 「リンク機能」の画面レイアウトがPOSと同じになり使いやすくなりました。
▼その他、コントロールに関して下記の内容を追加しました。
- 縮小・拡大が簡単にできるようになり最小(最大)寸法も変更になりました。
- コントロールに接続できる接続ラインの本数が無制限になりました(分岐コントロールを除く) 。
- オンライン再生で分岐内容を再生できるようになりました。
- コントロールのアイコンを一新しました。
<システム設定>
- システム設定ウィンドウが追加になりました。ここでは、「Syncボタンは必ずONにしておく」「前回のプロジェクトを自動的に読み込む」など、自分にあったHeartToHeart4に設定することが可能です。
- 特定のサーボモーターをCOMポートからの命令だけで動くように設定できるようになりました。ここで設定したサーボモーターはPOSコントロールには現れませんので、モーションに関係無く制御できます。
- モーション編集画面サイズを一括で変更できるようになりました。
- トリムデータを除いてプロジェクトを書き込みできるようになりました。他のロボットからプロジェクトを移植してもトリムだけそのままにできます。

<KRCコマンダー>
- KRC(送信機)と同じ操作をHeartToHeart4の画面内で行うことができます。ボタンを押したままの状態も再現できますので、有線で使用すれば作成中のモーションをボタン操作と同じ様にテストできます。
- ボタンにはキーボードショートカットを割り当てることができます。
- ゲームパットなどを読み込めばCOMポートからボタンデータを出力しますので、Bluetooth経由でのボタン操作も可能です。
<その他>
- ユーザー任意変数(2バイト固定x20個)が使えるようになりましたので、AD値、サーボポジションなどを一時的に保存し(GetValue)、計算を施す(Calc、Swap)ことができます。
- 以前のプロジェクトを読み込んだときは、自動的にプロジェクト変換ウィザードが開始します。プロジェクト変換後には、全てのモーションを再ビルドしてRCB-4に書き込む必要があります。
その他多数の機能がアップデートされています。
HeartToHeart4 Ver.2.0は下記のリンクよりダウンロードできます。今回より多脚ロボットKMRシリーズ、KMシリーズのモーションもインストーラーに含まれています。
![]() HeartToHeart4 Ver2.0<ダウンロード>
HeartToHeart4 Ver2.0<ダウンロード>
<インストールについて>
- Windows XP(SP2以降)、Windows Vista(32bit、64bit)、Windows 7(32bit、64bit)対応。
- ZIPファイルを解凍するとsetup.exeとHTH4_V200.msiの2つのファイルができますので、「setup.exe」をダブルクリックしてインストールしてください。
- 以前のバージョンのHeartToHeart4はできるだけアンインストールしてからお使いください。その場合はHeartToHeart4と一緒にインストールされたプロジェクトファイルは、かならずバックアップしてください。
- 以前のバージョンのHeartToHeart4をアンインストールせずに新しいバージョンをインストールすると、以前のバージョンは起動できなくなります。
<ユーザーズマニュアル> 2012/1/12追記
ユーザーズマニュアルは、下記の2通りの表示方法がございます。
1.HeartToHeart4インストール後、windowsの「スタートメニュー」から「すべてのプログラム」を表示、「HeartToHeart4」の項目の中に「HTH4ユーザーズマニュアル」がございます。
2.HeartToHeart4を起動し、「ヘルプ」をクリックすると表示されます。
より快適に、使いやすくなったHeartToHeart4をぜひお試し下さい。
【注意事項】 2012/1/20追記
KHR-3HVやKMR-M6などの組立説明書は、キット付属のVer.1.3の画面で解説をし ています。Ver.2.0から画面構成が大幅に変更された部分があり、手順が分からなくなる可能性がございますので、初めて組み立てる際には Ver.1.3をご利用の上、ロボットの初期設定を完了してからVer.2.0をご利用下さい。
HeartToHeart4の詳細をみる