







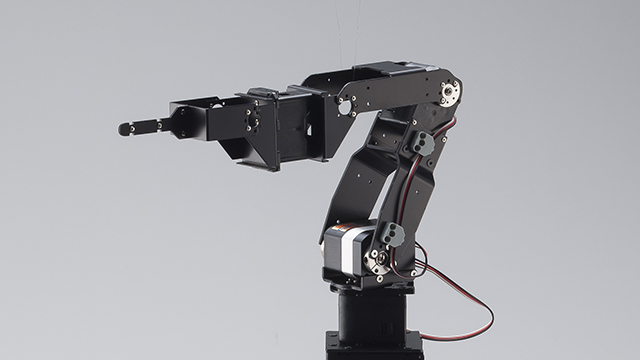
KRArm-1
価格: オープン
販売を終了致しました。
<製品仕様>
- KRS-6003HV ICS RedVersion ×1
(トルク:67kg・cm スピード:0.22sec/60°) - KRS-4034HV ICS ×2
(トルク:41.7kg・cm スピード:0.17sec/60°) - 寸法図
- 寸法図ダウンロード(3Dデータ SATファイルを圧縮ファイルでご提供。)
DXFデータダウンロード(寸法図のDXFファイルを圧縮ファイルでご提供。)
PDFデータダウンロード(寸法図のPDFファイルによるご提供です。)
- 寸法図ダウンロード(3Dデータ SATファイルを圧縮ファイルでご提供。)
<制御方法>
- コントロールボードを使用する場合:RCB-4HV
- PCから直接制御する場合:Dual USBアダプターHS
シリアル通信対応。コマンドを送るだけでサーボを制御することができます。
サーボのコマンドリファレンスは下記をご覧ください。
ICS3.5<ダウンロードページ>
ICS3.0<ダウンロードページ>
最大1.25Mbps高速通信にも対応しています。
デイジーチェーン接続で ケーブルもすっきりと配線することが可能です。
<セット内容>
- アーム本体(3軸状態:完成済み)
- Dual USBアダプターHS ×1
<用意が必要な物>
- 電源(12V-5A推奨)
- HeartToHeart4で制御する場合はRCB-4HVボードのみが必要です。
商品説明
新設されたROBO-ONE Arc/ROBO-剣のために開発されたアームロボット。
部位に合わせてトルクやサイズの違うサーボを使用することで先端になるほど軽くすることにより、それぞれのサーボの負担を少なくしています。 制御にはコントロールボードRCB‐4HVと専用ソフトウェアHeartToHeart4を使用できるほか、Dual USBアダプターHSを使用してPCから直接コマンドを送って制御することも可能です。
セットは第1回ROBO-ONE Arc/ROBO-剣に合わせて3軸での販売になりますが、先端のダミーサーボケースをKRS-2542HV/2552RHVに交換すれば軸を最大6軸まで拡張可能です。
本製品は通販限定販売を致します。
ご要望の際は以下のアドレスへお問い合わせください。
webmaster@kondo-robot.com
ROBO-剣に関しましてはこちらをご覧ください。
http://www.robo-one.com/rc/index.html
※注意事項
Go! Simulation、MATLAB(R)、LabVIEWなどソフトウェアやプログラミングに関するお問い合わせには一切対応できません。予めご了承下さい
KRArm-1特徴
【6軸まで拡張可能】

◀交換用フレーム
先端のフレームを交換することで6軸まで拡張することができます。
【交換前】
拡張には、KRS-2552RHV/2542HV/2552HVのいずれかを使用することができます。
【交換後】

▼追加に対応するサーボモータ
KRS-2552RHV ICS /2552HV ICS RedVersion
(トルク:14kg・cm スピード:0.14sec/60°金属ギヤ)
KRS-2542RHV ICS /2552HV ICS RedVersion
(トルク:11kg・cm スピード:0.12sec/60°樹脂ギヤ)