<スペック>
(11.1V時)
●最大トルク:14.0kgf・cm
●最高スピード:0.14s/60°
●寸法:41×21×30.5mm(突起部除く)
(寸法図)
●重量:41.5g(サーボホーン含まず)
●最大動作角度:270°
●最大消費電流:1.3A
●ギヤ種類:金属
●ケース材質:樹脂
●ギヤ比:312.4:1
●電源電圧:HV仕様(9V~12V)
●通信規格:ICS3.6(シリアル/PWM選択式)
●通信速度:115200/625000/1250000bps
●初期設定:ID0/BR115200
●信号レベル:TTL
●回転モード:可
<対応コントロールボード>
●RCB-4HV
●RCB-4mini
●RCB-3HV
●KCB-5
※RCB-3でご利用いただく場合はこちらの記事をご一読ください。
<インターフェース>
●Dual USBアダプターHS
●ICS USBアダプターHS
<付属品>
【単品】
ZH接続ケーブル2A (300mm)×1本
ZH接続ケーブル2B (300mm)×1本
M3×8 低頭ホーン止めビス ×1本
<商品説明>
KHR-3HV Ver.3標準のサーボモータ。
全段金属ギヤ、ファイナルはベアリングを使用しているため剛性が高く、負荷のかかる動きや歩行動作をなめらかに再現します。
■ギヤ:金属ギヤ
全段金属ギヤを採用することでロボットの安定した動作を実現。
さらに、軸をベアリングで支えることで安定した動作を実現しました。
■ケース:KRS-2500シリーズ
コンパクトなKRS-2500シリーズのケース。
ロボットのシルエットをすっきりとまとめることができます。
また、表面に凹凸が少ないためフレームの設計も簡単になりました。
コネクタは、ボトムケース側に2個装備しています。
【"R2"進化のポイント】
■通信仕様:ICS3.6
通信には、シリアルとPWMを選択できるICS3.6を採用。
ICS3.6は、ICS3.5の上位互換仕様です。
3.5の内容に現在値を取得するコマンドを実装しました。
ストレッチやスピードを読み込むコマンドと同じように現在値を読み込めますので、プログラムでサーボを制御する際に便利です。
▼テクニカルガイド『ICS3.5/3.6解説』
■互換性について
ICS3.6はICS3.5/ICS3.0の上位互換ですので、そのまま置き換えたり、サーボを組み合わせて通信しても従来通り問題なくご利用いただけます。
ただし、RCB-3でご利用いただいたときのみ一部組み合わせに注意が必要です。
詳細はこちらをご参照ください。RCB-4やその他マイコンボードでは問題ありません。
<制御方法> コントロールボードRCB-4HVから制御する
RCB-4HVは、2系統のサーボなどICSデバイス用を制御する端子を装備し、アナログセンサー用の端子を10ポート、デジタルI/O端子を10ポート用意しています。
HeartToHeart4は、様々な機能を持つコントロール(パネル)を並べることでモーション作りが可能です。
簡単な「あいさつ」などのモーション作成から、センサーや無線コントローラのボタンによる分岐など複雑なモーションも作成可能です。
サーボは、それぞれにID番号を割り振り、デイジーチェーン接続によりデバイス同士を接続して通信します。
【必要な製品】
・RCB-4HV
・Dual USBアダプターHS
・HV電源スイッチハーネス

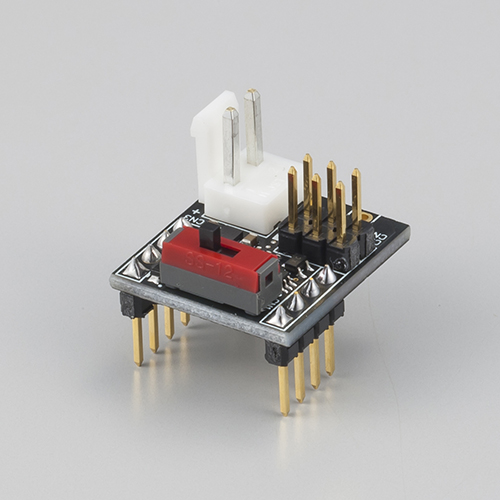
<制御方法> 市販のマイコンボード、小型PCボードから制御する
ICSデバイスは、信号線のTx(送信)とRx(受信)が一体になっていますので、UARTに接続する場合は別途回路が必要でしたが、この変換基板を使用することで端子の接続のみ行えばICSデバイスとの通信ができるようになります。
通信方法、コマンドについてはソフトウェアマニュアル(コマンドリファレンス)をご参照ください。
『シリアルサーボ制御方法(2) ICS編』
『シリアルサーボ制御方法(3) ソフト編』
【必要な製品】
・ICS変換基板
・HV電源スイッチハーネス
※Arduino UNOで使用する場合
・KSBシールド2
Arduino用のライブラリを公開しました。下記よりダウンロードしてご利用ください。
『ICS Library for Arduino ver.2』
★Arduinoライブラリの詳細な使用方法はこちらの記事をご覧ください。
『ICS変換基板の使用方法(1) 準備編』
『ICS変換基板の使用方法(2) サーボ制御編』
<電源>
【対応バッテリー】
・ROBOパワーセル F3-850タイプ (Li-Fe)
・ROBOパワーセル F3-1450タイプ (Li-Fe)
・ROBOパワーセル F3-2100タイプ (Li-Fe)
※バッテリーの取り扱いには注意が必要です。こちらの注意事項をよくお読みになってからご利用ください。
【充電器】
・リフェバッテリー専用充電器BX-20LF
【ACアダプター】
アームロボットなど数個のサーボでしたら以下のACアダプターをご利用いただけます。
ご利用の際は電流の容量にご注意ください。
・ACアダプター(12V5A)