ICS変換基板の使用方法(1) 準備編
ICS変換基板は、マイコンボードなどに搭載されているUART端子、またはI/O端子のソフトウェアシリアルを使用してサーボモータなどICS機器と通信するための変換基板です。
従来は、ICS機器とマイコンボードを中継する回路を作成する必要がありましたが、この基板を使用することで簡単に制御することができるようになります。
●ICS機器とは
ICSは近藤科学独自のデバイスやマイコンボード間で使用する通信規格です。この通信規格を採用した製品をICS機器と呼称しています。製品としては、サーボモータ、無線コントローラの受信機があります。以下の解説では、ICS機器はサーボに該当します。
今回は、ICS変換基板の使用方法の例として、このICS変換基板とKSBシールド2を組み合わせ、Arduino UNO R3でサーボを制御する方法をご紹介します。
Arduino UNO R4をご利用される場合は『ICS変換基板の使用方法(1) 準備編(R4改訂版)』をご参照ください。
【関連記事】
ICS変換基板の使用方法(5) Arduino Nano EveryでKRSサーボを制御
■ICS変換基板について
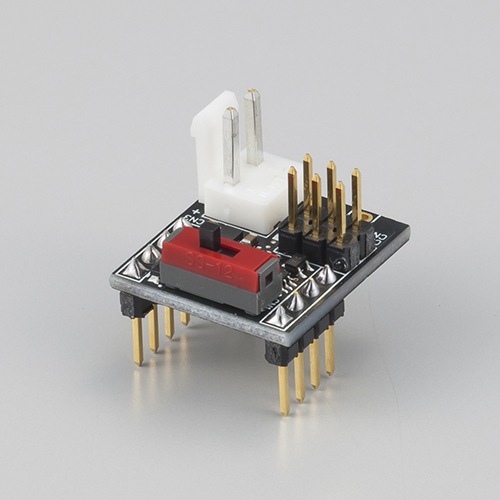
ICS変換基板 ¥1,800(税別)
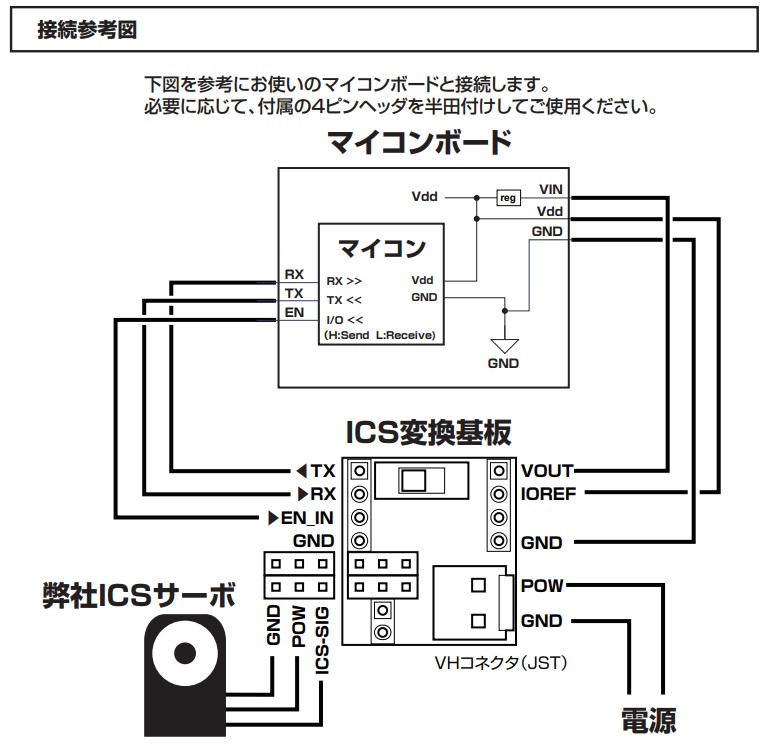
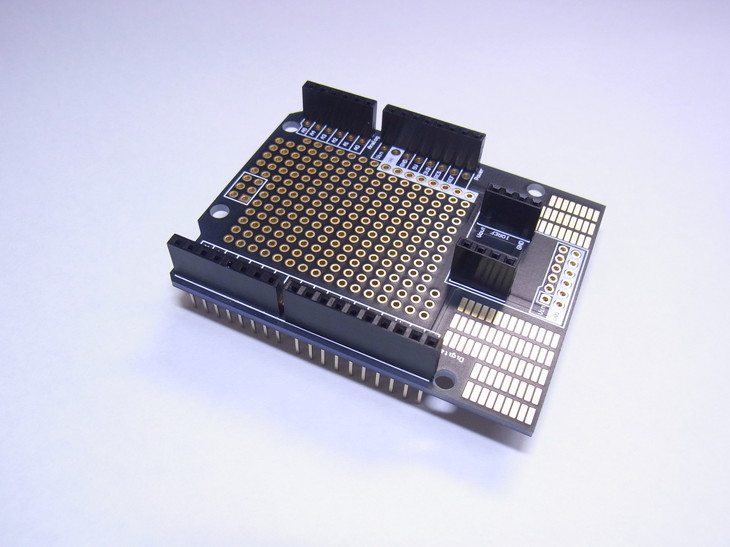
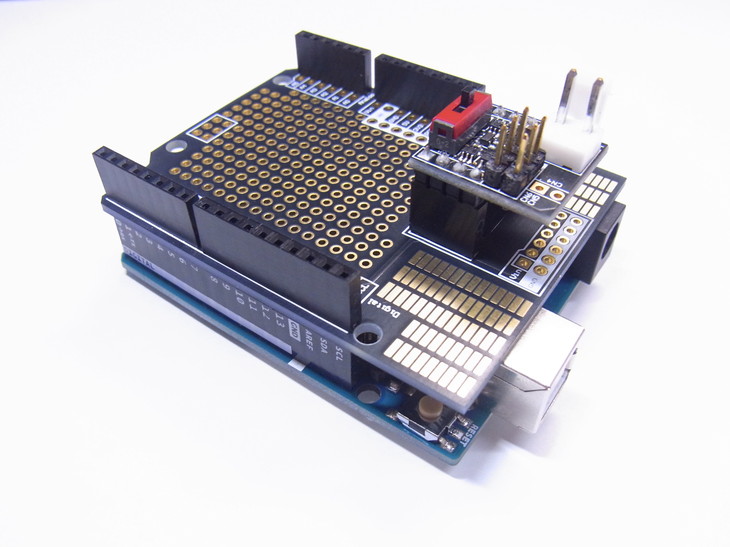
ICS変換基板上には、マイコンボードと通信するための端子と、サーボと通信するための端子に分かれて実装されています。
サーボに接続する端子には、予めヘッダピンが用意されていますので、極性に注意して接続すれば完了です。
マイコンボードに対しては、各端子にそのまま配線するだけですので非常に簡単です。また、マイコンボードとしてArduino UNO R3を使用する場合は、シールド基板を使用することで配線の手間も省くことができます。
ICS変換基板上のスイッチは、マイコンボードがUARTを他の機能と併用して使用している場合に、サーボの通信とマイコンボードの通信が混信しないための切り替え用に用意しています。「書込」の状態では、ICS機器とマイコンボードの接続が切れた状態になりますので、マイコンボードに合わせて必要な場合はご利用ください。
マイコンボード上にUARTが複数あり、端子がICS機器専用になっている場合は、切り替えは不要です。

■シールドについて
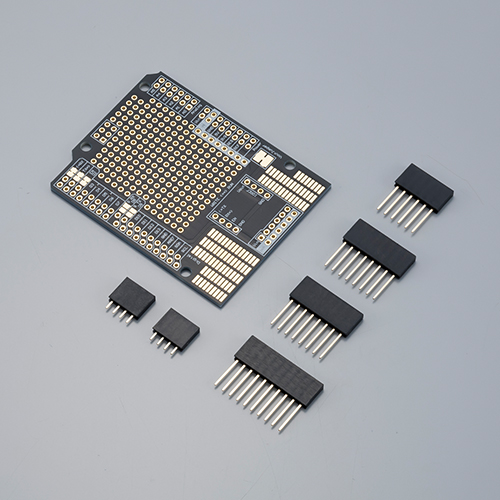
KSBシールド2 ¥1,200(税別)
ICS変換基板、RCB-4変換基板をArduino UNO R3/R4で使用するためのシールド基板です。各端子を配線する手間なくご利用できます。ユニバーサルのフリーエリアや面実装用にフリーのパットも用意しましたので、自作回路を搭載することも可能です。HardwareSerialとSoftwareSerialに対応しています。
■用意するもの
・Arduino UNO R3+USBケーブル
・ICS対応サーボモータ
KRSシリーズのサーボが該当します。例ではKRS-3301 ICSを使用しています。
ケーブルは、サーボに付属するケーブルを使用します。
・ACアダプター12V5A、または5.9V2A
使用するサーボに合わせてご用意ください。
・HV電源スイッチハーネス、またはLV電源スイッチハーネス
スイッチ付きの電源ケーブルです。使用するサーボの電源に合わせてご用意ください
・Dual USBアダプターHS
サーボのID番号を変更する際に使用します。
・はんだごて
●KRSサーボの対応電源について
サーボは、シリーズによって対応する電源が異なります。下記を参考に適切な電源を選択してください。
【HV対応サーボ】:HVは、9~12Vの電源に対応しています。
シリーズ:KRS-9000/6100/6000/5000/4000/2500シリーズ
ACアダプター:12V5A
バッテリー:ROBOパワーセルF3-850/1450/2100(9.9V)
電源スイッチハーネス:HV電源スイッチハーネス
【LV対応サーボ】:LVは、6~7.4Vの電源に対応しています。
シリーズ:KRS-3300/3200シリーズ
ACアダプター:5.9V2A
バッテリー:ROBOパワーセルF2-850/1450(6.6V)
電源スイッチハーネス:LV電源スイッチハーネス
※対応電圧の異なるサーボは混在できませんのでご注意ください。
※バッテリー、ACアダプター、電源スイッチハーネスはHV、LVシリーズによってコネクタが異なります。製品ごとに内容を確認し、対応製品をそろえてご利用ください。
■準備
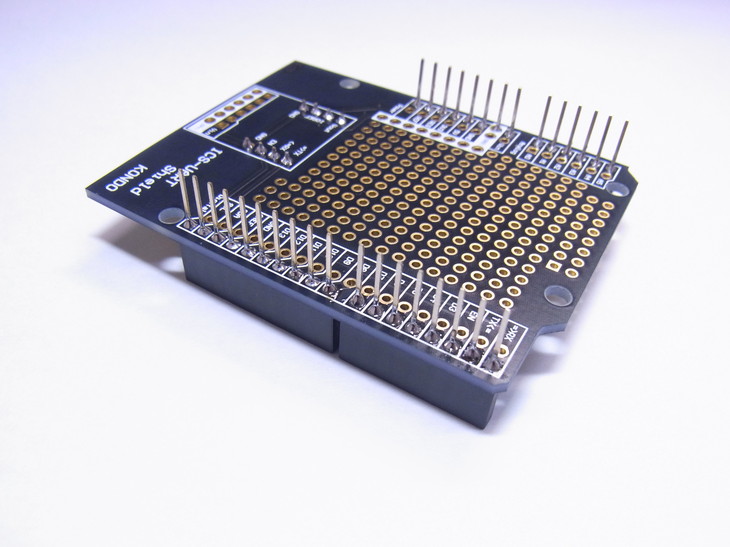
1)基板のはんだ付け
ICS変換基板、及びKSBシールド2は、ご購入時は端子がついていませんので、まずは付属のピンヘッダをはんだ付けしてください。
●KSBシールド2をSoftwareSerialで使用する場合
KSBシールド2は、デフォルトでHardwareSerialに接続されています。SoftwareSerlaiは下記のように作業してください。
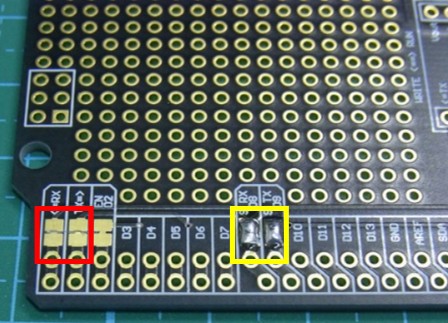
画像のように、赤枠のRX、TX端子のパターンの細い部分をカッターなどでカットし、黄色枠のS_RX(D8)、S_TX(D9)端子のパターンをはんだで接続します。EN(D2)はカットしませんのでご注意ください。
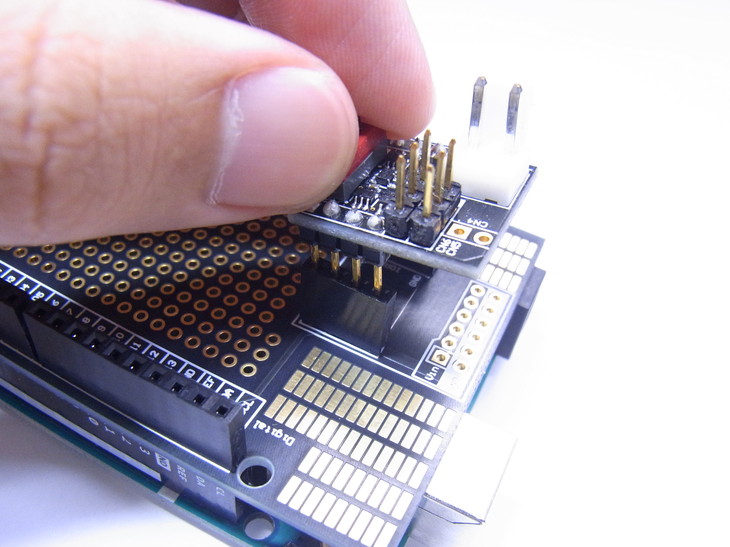
はんだ付けが完了したら各ボードを接続します。
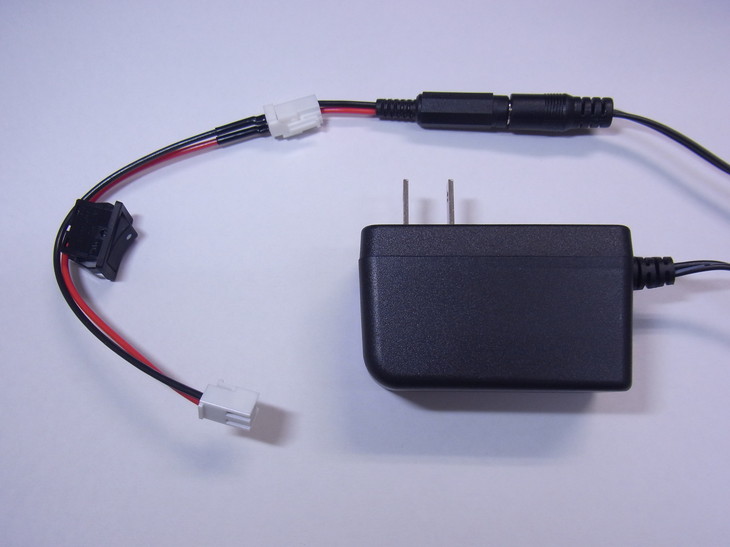
2)電源の用意
電源は、ACアダプターを使用します。バッテリーでも使用できますがACアダプターですとバッテリーのように残量を気にする必要がありませんので、開発の際はACアダプターがお勧めです。ACアダプターの種類は、サーボに合わせて選択します。
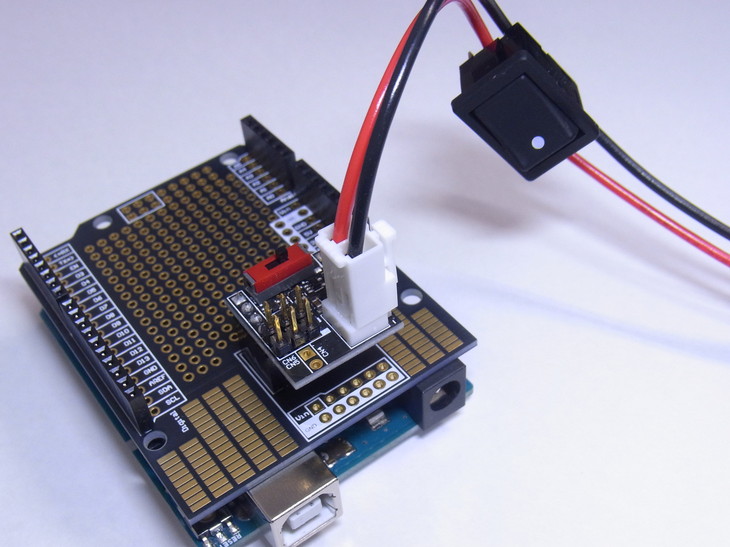
また、電源の接続の際に、スイッチがあると便利ですので電源スイッチハーネスを中継します。
●KRS-2552RHV ICSなどHVサーボの場合
→ ACアダプター(12V5A) + HV電源スイッチハーネス
●KRS-3301 ICSなど6~7.4V対応サーボの場合
→ ACアダプター(5.9V2A) + LV電源スイッチハーネスを使用します。
配線は、ACアダプター付属の変換ジャックを経由して電源スイッチハーネスに接続し、ICS変換基板とつなげば完了です。
3)サーボの設定確認
最後にサーボを準備します。
まずは、サーボのID番号を変更します。出荷時は、ID番号が0に設定されています。今回の例では、ID0と1を使用しますので、片方をID1に変更します。
IDの変更には、シリアルマネージャーソフトとDual USBアダプターHSを使用します。IDの変更方法、USBアダプターのドライバーインストールは、ソフト付属のマニュアルをご参照ください。
■『ICS3.5/3.6 Manager software』
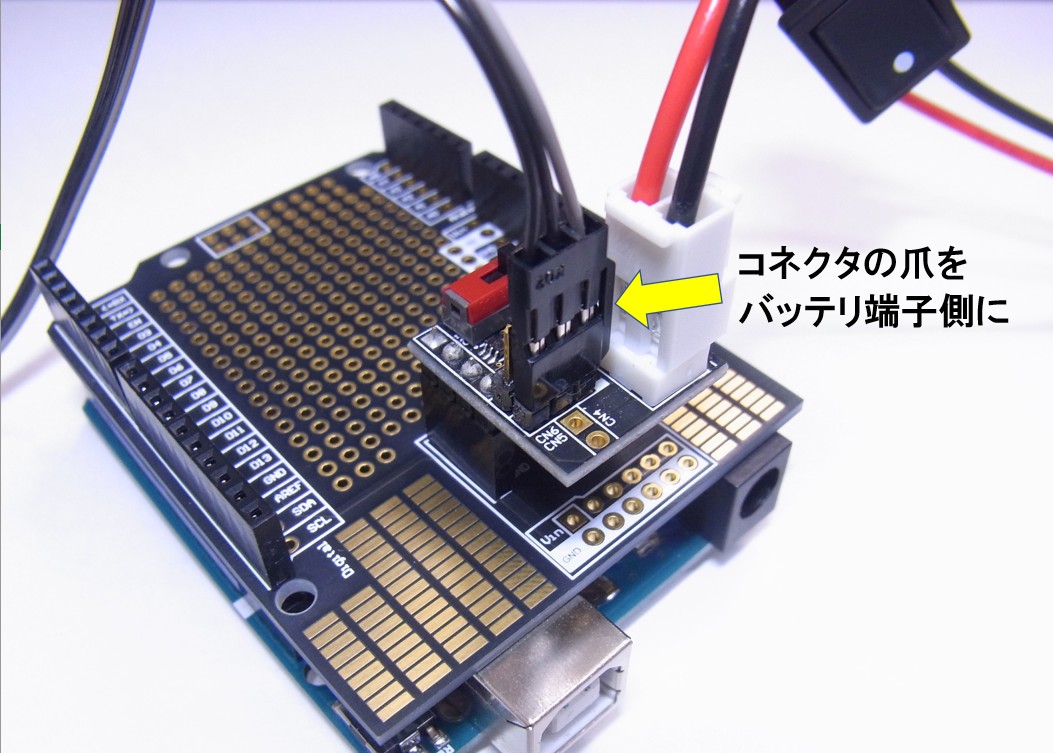
IDの書き換えが終わったら基板に配線します。コネクタの爪がある方をボードの内側(電源端子がある方向)に向けて接続してください。極性を間違えた場合、逆説状態となりサーボが破損する恐れがありますので、マニュアルなどを確認し十分に注意して接続してください。
ICSサーボモータは、サーボ同士を接続するデイジーチェーン接続(数珠状につなげた状態)ができます。一つのサーボを基板に接続したら、もう一つのサーボは、接続したサーボの空いている端子に接続してください。この際に、IDの順番は関係なく接続できますので、基板からID0→ID1でも、ID1→ID0でも構いません。

ICS変換基板にはサーボ用の端子が2セットありますが、回路上でつながっていますのでどちらに挿しても構いません。一つのUARTに接続するサーボの推奨個数は9個です。ロボットに搭載するサーボを2つの端子に分けてバランスよく配線してください。
4)プログラミング環境の準備
上記の他に、Arduinoをプログラミングするためのスケッチのインストール、ライブラリのインポートが必要です。こちらの方法は、『ICS Library for Arduino Ver.2』付属のマニュアルを参考に行ってください。
以上で準備が整いました。次の記事では、ICS Library for Arduinoに付属するサンプルプログラムを使用してサーボの制御を行います。
KRS-9303HV ICSの詳細をみる KRS-9304HV ICSの詳細をみる KRS-2552R3HV ICSの詳細をみる KRS-3204R2 ICSの詳細をみる KRS-2572R2HV ICSの詳細をみる KRS-2552R2HV ICSの詳細をみる KRS-2542R2HV ICS の詳細をみる KRS-9004HV ICSの詳細をみる KRS-5054HV ICS H.Cの詳細をみる KRS-5053HV ICS H.Cの詳細をみる KRS-5034HV ICSの詳細をみる KRS-5033HV ICSの詳細をみる KRS-5032HV ICSの詳細をみる KRS-6104FHV ICSの詳細をみる KRS-3304R2 ICSの詳細をみる KRS-3302 ICSの詳細をみる ICS変換基板の詳細をみる KSBシールド2の詳細をみる ICS変換基板シールドの詳細をみる KXR用オプションボード搭載セットAの詳細をみる KRS-6003R2HV ICSの詳細をみる KRS-6003RHV ICSの詳細をみる KRS-2572HV ICSの詳細をみる KRS-2552RHV ICSの詳細をみる KRS-2542HV ICSの詳細をみる KRS-4037HV ICSの詳細をみる KRS-4034HV ICSの詳細をみる KRS-4033HV ICSの詳細をみる KRS-4032HV ICSの詳細をみる KRS-4031HV ICSの詳細をみる KRS-3304 ICSの詳細をみる KRS-3301 ICSの詳細をみる KRS-3204 ICSの詳細をみる KXR アドバンスセットA Ver.2の詳細をみる KXR-A5 アーム型 Ver.2の詳細をみる KXR-L4T-R カメ型・ローバー型 Ver.2(アカデミックパック)の詳細をみる KXR用オプションボード搭載セットBの詳細をみる