






KRS-6003RHV ICS
価格: オープン
販売終了品
上位互換機のKRS-6003R2をご利用ください。
■6個セット:No.03084 オープン
■18個セット:No.03085 オープン
<スペック>(11.1V時)
●最大トルク:67.0kg・cm
●最高スピード:0.22s/60°
●寸法:51.5×32×39.5mm(突起部除く)
●重量:103g(サーボホーン含む)
●最大動作角度:270°
●最大消費電流:6.1A
●ギヤ種類:特殊アルミギヤ
+ステンレスギヤ
●ケース材質:アルミ(トップ、ミドル)
ガラス入り樹脂(ボトム)
●ギヤ比:362.88:1
●電源電圧:HV仕様(9V~12V)
●通信規格:ICS3.5(シリアル/PWM選択式)
●通信速度:115200/625000/1250000bps
●初期設定:ID0/BR115200
●信号レベル:TTL
●回転モード:可
<対応コントロールボード>
●RCB-4HV
●RCB-3HV
●KCB-5
※以下PWM限定
●RCB-3J
<インターフェース>
●Dual USBアダプターHS
●ICS USBアダプターHS
<付属品>
【単品】
HV接続ケーブル(400mm)×1本
アルミクランプホーン×1個
【6個セット】
HV接続ケーブル(400mm)×6本
アルミクランプホーン×6個
【18個セット】
HV接続ケーブル(400mm)×18本
アルミクランプホーン×18個
Made in Japan
商品説明
本製品の販売は終了しました、後継製品は、KR-6003R2HV ICSとなります。
後継製品のKR-6003R2HV ICSは、本製品の上位互換となるICS3.6を実装しておりますので、問題なくご使用いただけます。
----------------------------------------------------------------------------------------------------------------------------
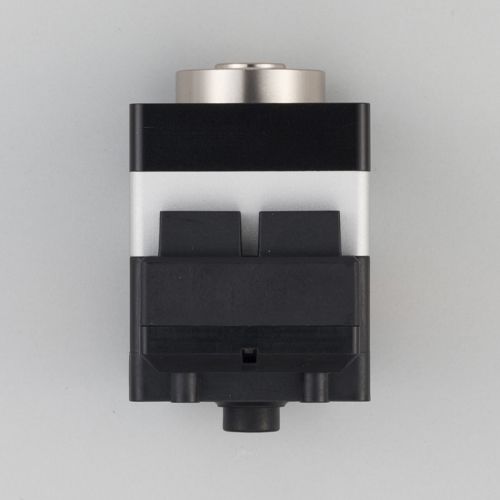
最大トルク67kgの高トルクサーボモータ。トップ、ミドルケース共にアルミケースを採用し更に剛性を高めています。
■ギヤ:特殊アルミギヤ+ステンレスギヤ
強度が非常に高く軽量な特殊アルミギヤを標準装備。さらにサードギヤにステンレス製のギヤを組み入れることで強度がアップしました。出力軸をベアリング支持し安定性も向上。KRS-6003RHVにはハイトルクタイプのギヤが組み込まれており、KONDOサーボラインナップ中最も強い67kg/cmを出力します。
■ケース:KRS-6000シリーズ
ケースの、トップとミドルをアルミ製にすることで、ギヤシャフトのがたつきを軽減しハイパワーな出力に耐えうる高剛性、高強度なケースを実現しています。さらにモーターを放熱するためのヒートシンクの役割も兼ねています。
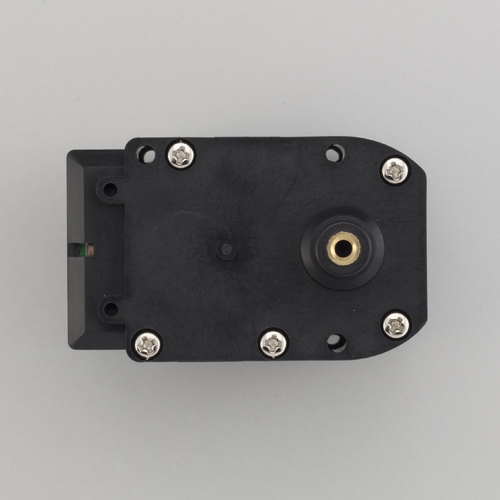
使用する場所にあわせてオプションのボトムケースと交換することで、組込みが簡単になります。
■通信仕様:ICS3.5
通信には、シリアルとPWMを選択できるICS3.5を採用。
制御するマイコンボードに合わせてサーボの通信を変更することが可能です。
また、シリアルモードではサーボにIDを割り振ることができますので、サーボ同士をつなげるマルチドロップ接続が可能。
本体には通信状態表示用の赤LEDを実装しました。
■ダブルサーボにすることで更にトルクアップ
ダブルサーボ用ボトムケースセットを使い、サーボを背中合わせで組み合わせることで
トルクを2倍にすることができます。
ICS3.0の「リバース」「スレーブ」機能を活用すれば制御も簡単にできます。
▼ダブルサーボ用ボトムケースセット
【KRS-6003HVとの違い】
KRS-6003RHVは、ソフトウェアとギヤの一部を変更しました。
ソフトウェアを従来のICS3.0から3.5に変更することで、PWM信号での制御に対応することができるようになりました。一部機能を除き、ICS3.0とコマンドが共通です。
サードギヤをアルミ製からさらに硬質なステンレス製に変更しました。これによりさらに強度が増して壊れにくくなりました。
KRSサーボに関する情報は、「ICS・KRSサーボ開発資料」にまとめてご用意しています。また、の「テクニカルガイド」にもロボットに関する様々な情報を公開していますので、ぜひご参照ください。
関連するオプション
-

M3-8ホーン止めビス(ワッシャーヘッドタイプ)
コード: 02175 ¥550 (税込)B3M/KRS-6003標準のホーン止めビス。ヘッドにワッシャー状の加工が施されており、既存のフラットヘッドビスタイプよりしっかりと固定することができます。
-

ベアリング付アルミフリーホーン(B3M/KRS-6000シリーズ用)
コード: 02137 ¥1,320 (税込)ベアリング装備でスムーズな両軸支持。高精度、高剛性のアルミフリーホーン。B3M・またはKRS-6000シリーズのボトムケースにある軸に固定して使用します。
-

HV接続ケーブル
コード: 02037 ¥660 (税込)電流を多く流すサーボモーターのために設計された接続ケーブル。KRS-6000/6100/9000/9300シリーズに最適。
-

アルミクランプホーン(KRS-6000HVシリーズ用)
コード: 02031 ¥1,320 (税込)強固な保持力を発揮するアルミ性クランプホーン。 挟み込んで軸に固定するため通常のホーンに比べて保持力がアップします。KRS-6003HVに付属しています。スペアやメンテナンス用におすすめ。B3M-1000/1100にも対応しています。
-

ダブルサーボ用ボトムケースセット
コード: 02029 ¥1,320 (税込)KRS-6000シリーズをダブルサーボに組み合わせるためのボトムケースセット。組み合わせに必要なビスやピンが付属します。
-

フランジフラットボトムケース
コード: 02027 ¥660 (税込)KRS-6000シリーズのボトムケースをまるごと交換することで、フラットタイプ、フランジ付きボトムケースに変更することが出来ます。二枚を組み合わせるとKRS-6000シリーズをダブルサーボに組みつけられます。
-

軸付きフランジボトムケース
コード: 02025 ¥660 (税込)KRS-6000シリーズのボトムケースをまるごと交換することで、軸付き、フランジつきのボトムケースに変更することが出来ます。
-

フラットボトムケース
コード: 02023 ¥550 (税込)KRS-6000シリーズのボトムケースをまるごと交換することで、軸なしのフラットタイプに変更することが出来ます。
-

ボトムケースセット
コード: 02021 ¥770 (税込)KRS-6003HV標準装備のボトムケース。スペアやメンテナンス用に。