




KRS-6003R2HV ICS
価格: オープン
生産終了品
■6個セット:No.03138 オープン
■18個セット:No.03139 オープン
<スペック>(11.1V時)
●最大トルク:67.0kg・cm
●最高スピード:0.22s/60°
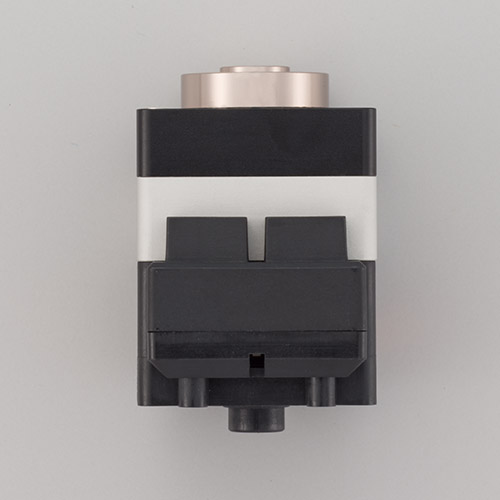
●寸法:51.5×32×39.5mm(突起部除く)
(寸法図)
●重量:103g(サーボホーン含む)
●最大動作角度:270°
●最大消費電流:6.1A
●ギヤ種類:特殊アルミギヤ
+ステンレスギヤ
●ケース材質:アルミ(トップ、ミドル)
ガラス入り樹脂(ボトム)
●ギヤ比:362.88:1
●電源電圧:HV仕様(9V~12V)
●通信規格:ICS3.6(シリアル/PWM選択式)
●通信速度:115200/625000/1250000bps
●初期設定:ID0/BR115200
●信号レベル:TTL
●回転モード:可
<対応コントロールボード>
●RCB-4HV
●RCB-3HV
●KCB-5
※以下PWM限定
●RCB-3J
<インターフェース>
●Dual USBアダプターHS
●ICS USBアダプターHS
<付属品>
【単品】
HV接続ケーブル(400mm)×1本
アルミクランプホーン(組込済み)
【6個セット】
HV接続ケーブル(400mm)×6本
アルミクランプホーン(組込済み)
【18個セット】
HV接続ケーブル(400mm)×18本
アルミクランプホーン(組込済み)
Made in Japan
商品説明
KRS-6003R2HVは生産を終了しました。後継機種としてKRS-9304HV、KRS-9303HVをご利用ください。互換性につきましては『KRS-9300シリーズとKRS-6000シリーズの互換性について』をご参照ください。
最大トルク67kgの高トルクサーボモータ。トップ、ミドルケース共にアルミケースを採用し更に剛性を高めています。
■ギヤ:特殊アルミギヤ+ステンレスギヤ
強度が非常に高く軽量な特殊アルミギヤを標準装備。さらにサードギヤにステンレス製のギヤを組み入れることで強度がアップしました。出力軸をベアリング支持し安定性も向上。KRS-6003RHVにはハイトルクタイプのギヤが組み込まれており、KONDOサーボラインナップ中最も強い67kg/cmを出力します。
ギヤ構成については、こちらの『KRSサーボギヤ対応表』をご参照ください。
■ケース:KRS-6000シリーズ
・高強度のアルミケースを採用
ケースの、トップとミドルをアルミ製にすることで、ギヤシャフトのがたつきを軽減しハイパワーな出力に耐えうる高剛性、高強度なケースを実現しています。さらにモーターを放熱するためのヒートシンクの役割も兼ねています。
使用する場所にあわせてオプションのボトムケースと交換することで、組込みが簡単になります。


■ダブルサーボにすることで更にトルクアップ
ダブルサーボ用ボトムケースセットを使い、サーボを背中合わせで組み合わせることで
トルクを2倍にすることができます。
ICS3.6の「リバース」「スレーブ」機能を活用すれば制御も簡単にできます。

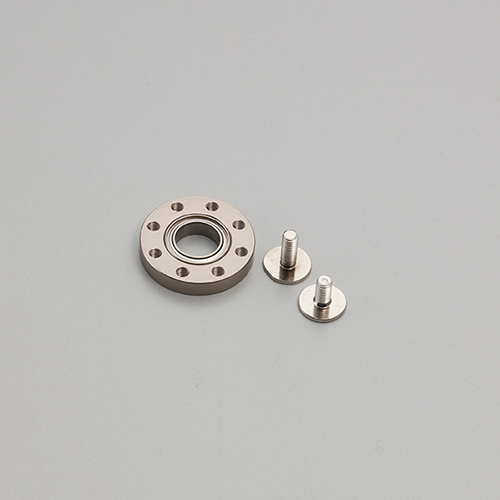
・フリーホーンを取り付け可能
ボトムケースには、出力軸のホーンと対になるフリーホーンを固定できます。ホーン固定部にはメタルインサートが埋め込まれていますので、従来よりしっかりとした固定が可能です。
対応オプション:ベアリング付きアルミフリーホーン(B3M/KRS-6000シリーズ用)

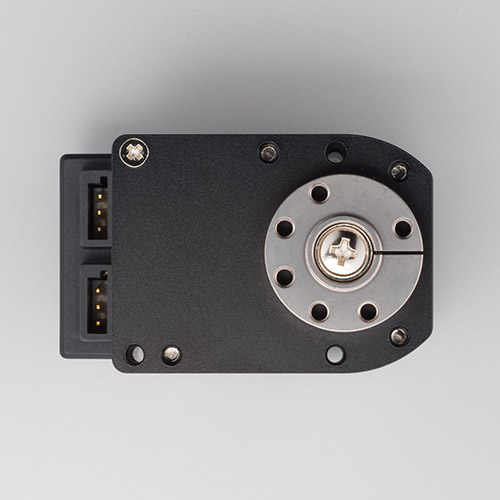
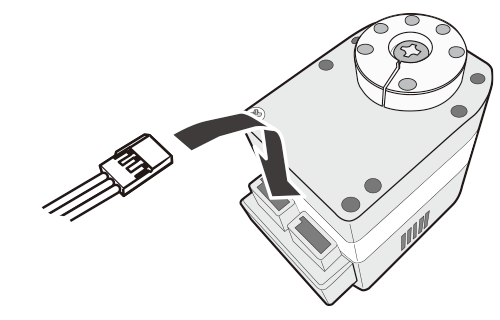
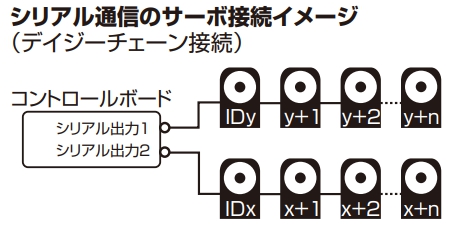
・ケーブル脱着式
ケーブルは脱着式で必要な長さのケーブルに交換することができます。コネクタが2つ実装されていますので、サーボに任意のIDを割り振ることによりサーボ同士を数珠状につなぐデイジーチェーン接続をすることが可能です。
対応オプション:HV接続ケーブル
■通信仕様:ICS3.6
通信には、シリアルとPWMを選択できるICS3.6を採用。
ICS3.6は、ICS3.5の上位互換仕様です。3.5の内容に現在値を取得するコマンドを実装しました。ストレッチやスピードを読み込むコマンドと同じように現在値を読み込めますので、プログラムでサーボを制御する際に便利です。
【KRS-6003RHVとの違い】
KRS-6003R2HVは、ソフトウェアをICS3.6に変更しました。
ICS3.6は、ICS3.5の上位互換仕様ですのでこれまで通りのご利用方法で使用できます。
ケース寸法、スペックなどのその他変更はありません。
■マニュアル
『ICS3.5 / 3.6ソフトウェアマニュアル(コマンドリファレンス)』
■寸法図
フレームの設計用に3D、2Dの寸法図をダウンロードしてご利用いただけます。こちらのページをご参照ください。
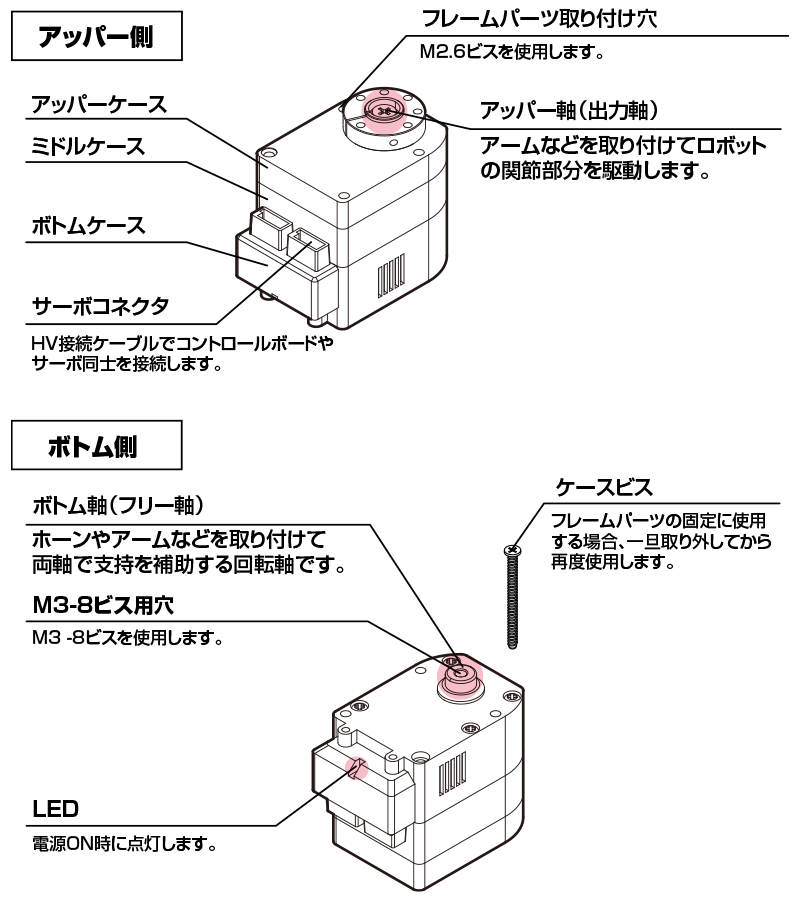
■各部名称
■搭載方法
●サーボケースへのパーツ固定
まず、ケースに固定されているM2.6-13 / M2.6-16ビスを取り外します。
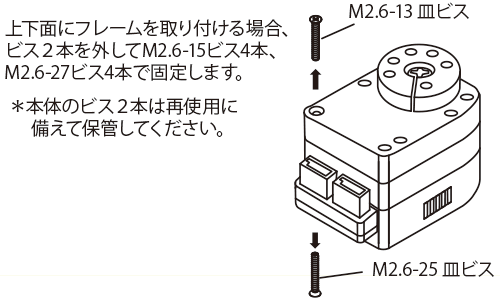
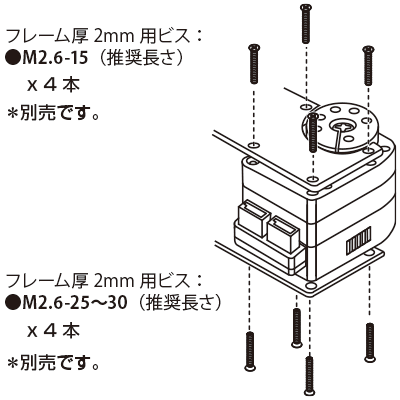
フレームの固定に使用するビスの長さは、下記のPDFを参考にしてください。
●軸へのパーツ固定
軸にパーツを固定する場合は、ホーンを使用します。出力軸と、フリー軸で対応するホーンが異なりますのでご注意ください。
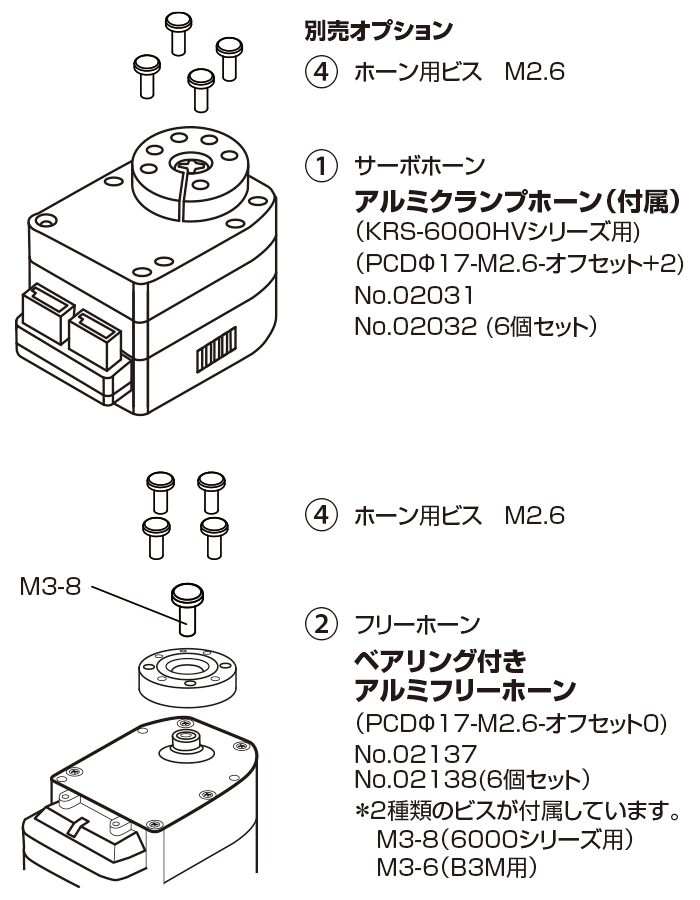
対応オプション:
アルミクランプホーン(KRS-6000HVシリーズ用)
M3-8ホーン止めビス(ワッシャーヘッドタイプ)
ベアリング付きアルミフリーホーン(B3M/KRS-6000シリーズ用)
■制御方法
●コントロールボードRCB-4HVから制御する
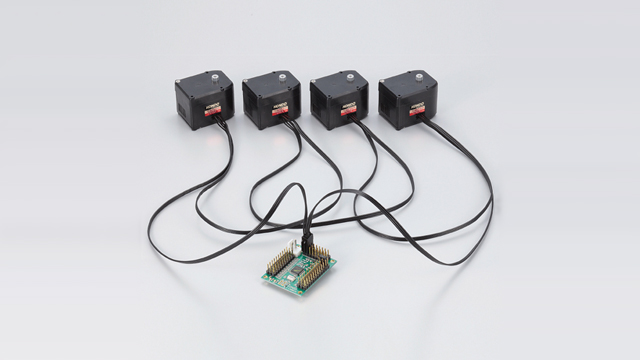
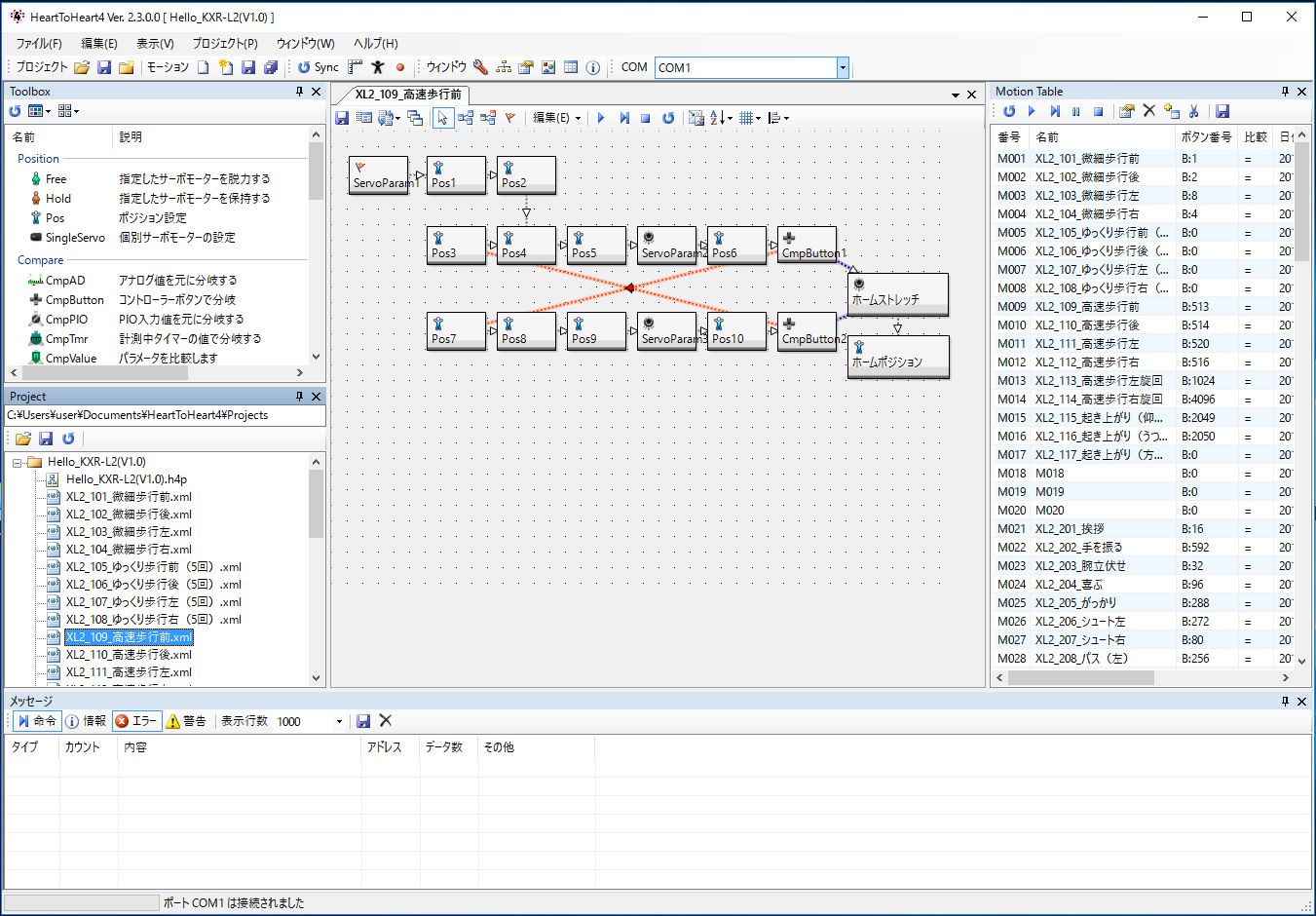
RCB-4HVとモーション作成ソフトHeartToHeart4を組み合わせて簡単にサーボを制御することができます。RCB-4は、2系統のサーボなどICSデバイス用を制御する端子を装備し、アナログセンサー用の端子を10ポート、デジタルI/O端子を10ポート用意しています。
HeartToHeart4は、様々な機能を持つコントロール(パネル)を並べることでモーション作りが可能です。簡単な「あいさつ」などのモーション作成から、センサーや無線コントローラのボタンによる分岐など複雑なモーションも作成可能です。
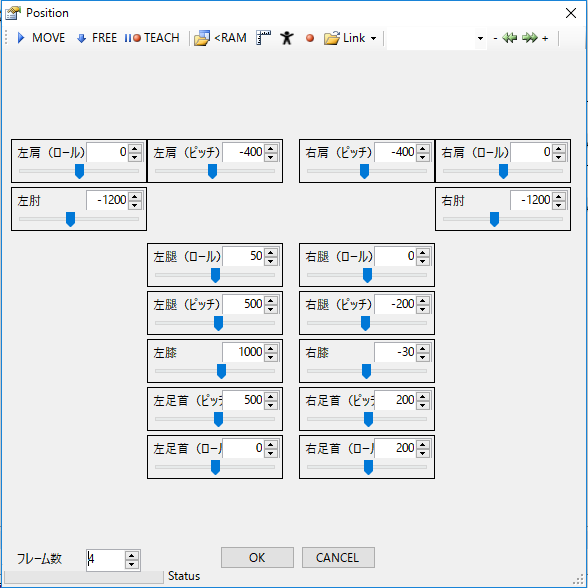
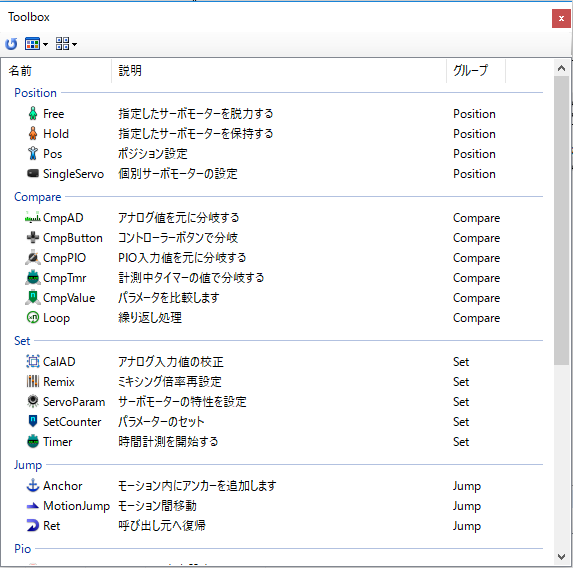
サーボは、それぞれにID番号を割り振り、デイジーチェーン接続によりデバイス同士を接続して通信します。

詳しい使い方は『HeartToHeart4講座』をご一読ください。
【必要な製品】
・RCB-4HV
・Dual USBアダプターHS
・HV電源スイッチハーネス
※RCB-4miniには対応していません。
【構成図】

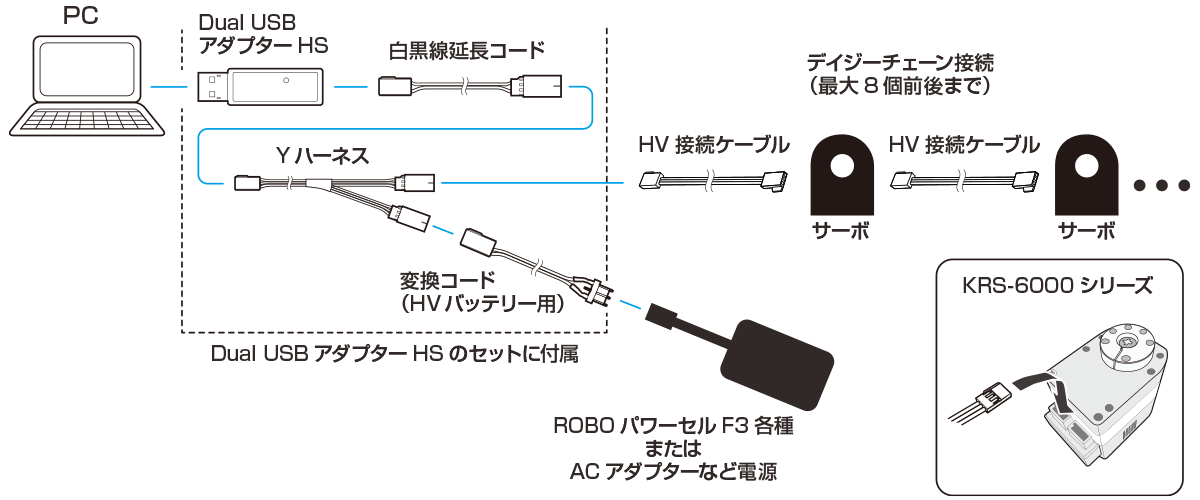
●PCから制御する

Dual USBアダプターHSを使用することで、PCから直接サーボを制御することができます。公開されているソフトウェアマニュアル(コマンドリファレンス)をもとにコマンドを送信します。通信方法やサンプルも公開されていますので、詳細は下記の記事をご覧ください。
『シリアルサーボ制御方法(4) PCから直接制御編(その1)』
『シリアルサーボ制御方法(5) PCから直接制御編(その2)』
【必要な製品】
(USBアダプター同梱のケーブルでPCと接続可能です)
【構成図】
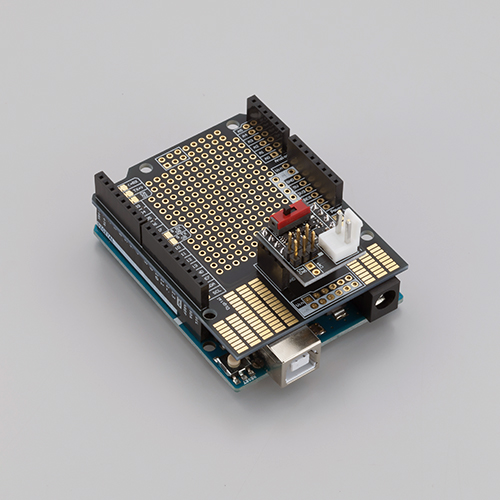
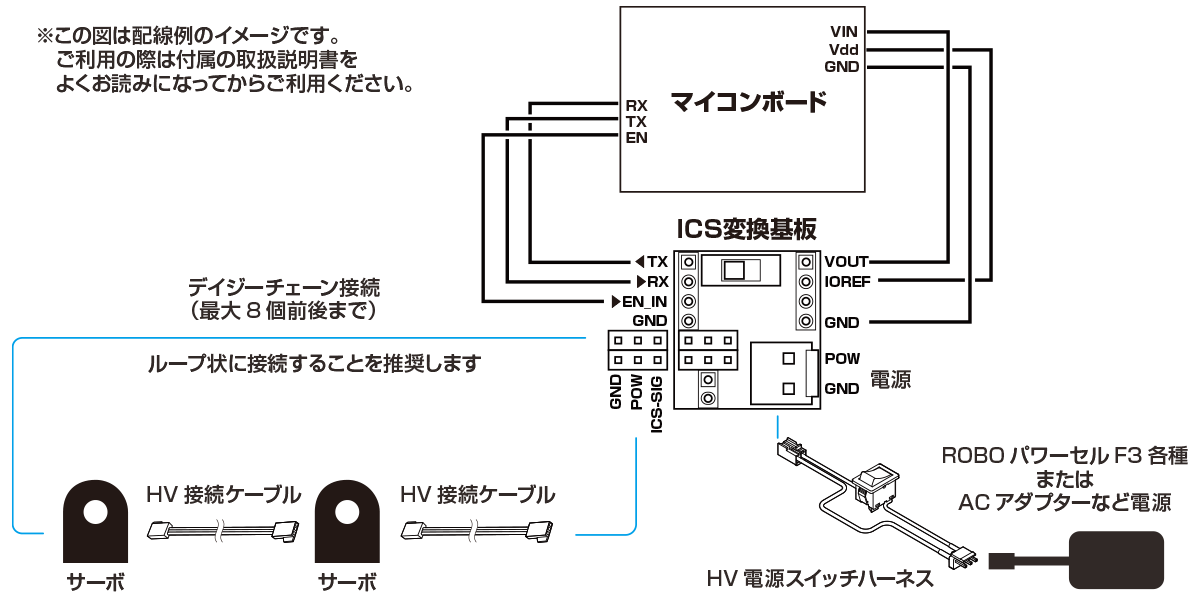
●市販のマイコンボード、小型PCボードから制御する
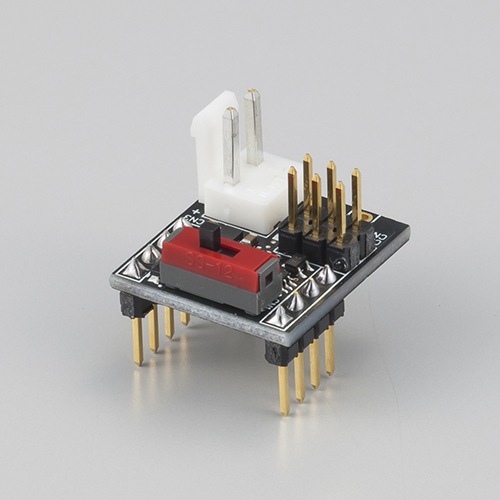
市販ボードのUART端子からサーボなどICSデバイスを制御することができます。ICSデバイスは、信号線のTx(送信)とRx(受信)が一体になっていますので、UARTに接続する場合は別途回路が必要でしたが、この変換基板を使用することで端子の接続のみ行えばICSデバイスとの通信ができるようになります。通信方法、コマンドについてはソフトウェアマニュアル(コマンドリファレンス)をご参照ください。
【必要な製品】
※Arduino UNOで使用する場合
・KSBシールド2 ×1
Arduino用のライブラリを公開しました。下記よりダウンロードしてご利用ください。
『ICS Library for Arduino ver.3』
★Arduinoライブラリの詳細な使用方法はこちらの記事をご覧ください。
『ICS変換基板の使用方法(2) サーボ制御編(R4改訂版)』
『ICS変換基板の使用方法(4-2) M5StackでID読み書き』
『ICS変換基板の使用方法(5) Arduino Nano EveryでKRSサーボを制御』
『ICS変換基板の使用方法(6-1) Arduino MEGAから18個のサーボを制御する』
【構成図】
●シリアルマネージャー
ICS3.5/3.6 マネージャーソフトウエアを使用することで、サーボのIDや通信速度を設定することができます。また、ストレッチやスピードなど各種パラメータの変更も可能です。
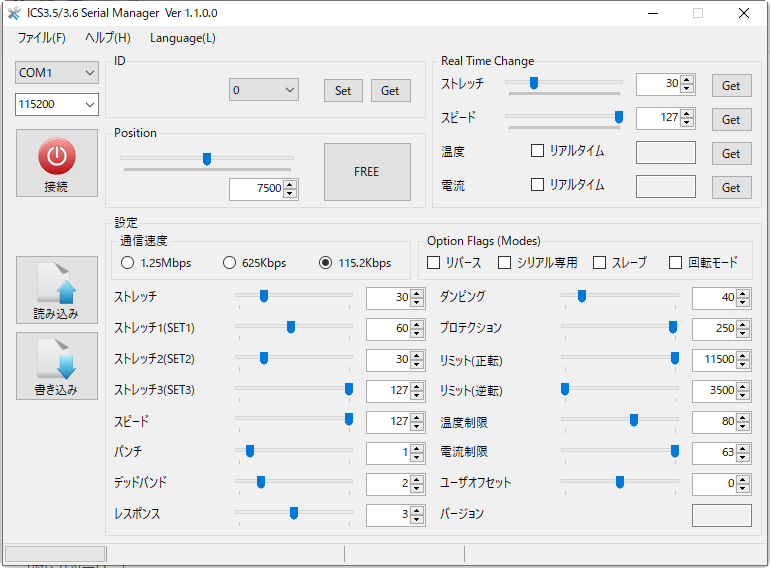
『ICS3.5/3.6 Manager software R1.1.0.0』
■電源
【対応バッテリー】
HVサーボには、3セル(9.9V)のリチウムフェライトバッテリーをご利用ください。

※バッテリーの取り扱いには注意が必要です。こちらの注意事項をよくお読みになってからご利用ください。
【充電器】

【ACアダプター】
アームロボットなど数個のサーボでしたら以下のACアダプターをご利用いただけます。ご利用の際は電流の容量にご注意ください。

KRSサーボに関する情報は、「ICS・KRSサーボ開発資料」にまとめてご用意しています。また、の「テクニカルガイド」にもロボットに関する様々な情報を公開していますので、ぜひご参照ください。
関連するオプション
-

ケースビスセット(M2.6-25/35)(5セット入り)
コード: 02261 ¥770 (税込)KRS-6000シリーズ、KRS-9000シリーズ標準のケースビスセットです。
-

ダブルサーボ用ボトムケースセット KRS-6000/9000シリーズ用
コード: 02240 ¥1,320 (税込) -
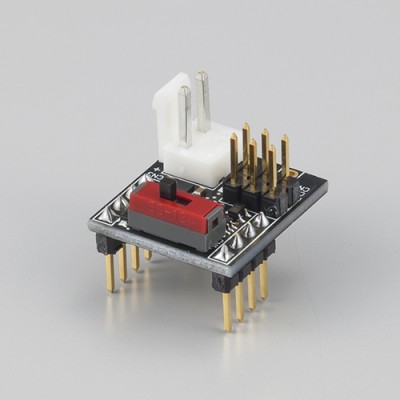
ICS変換基板
コード: 03121 ¥1,980 (税込)KRSサーボなどICSデバイスとマイコンのUARTを接続するための変換基板です。
-

ACアダプター(12V5A)
コード: 03140 ¥4,950 (税込)KHR-3HVなどHVサーボを使用したロボットに最適なACアダプターです。HV変換DCジャックが付属します。
-

M3-8ホーン止めビス(ワッシャーヘッドタイプ)
コード: 02175 ¥550 (税込)B3M/KRS-6003標準のホーン止めビス。ヘッドにワッシャー状の加工が施されており、既存のフラットヘッドビスタイプよりしっかりと固定することができます。
-

KCB-5
コード: 03081 ¥19,800 (税込)KRSシリアルサーボを制御したり、KHR-3HVや、多脚ロボットシリーズに搭載されているRCB-4HVをKCB-5へ載せ替えることで、C言語によるロボット制御プログラムを開発することができます。
-

ROBOパワーセル F3-1450タイプ (Li-fe)
コード: 02172 ¥3,850 (税込)ロボット用リチウムフェライトバッテリー。3セル / 9.9V / 1450mAh。XHバランス充電端子付き。HV対応のKRSサーボシリーズ、B3Mシリーズにおすすめです。
-

ROBOパワーセル F3-2100タイプ (Li-fe)
コード: 02174 ¥4,950 (税込)ロボット用リチウムフェライトバッテリー。3セル / 9.9V / 2100mAh。XHバランス充電端子付き。HV対応のKRSサーボシリーズ、B3Mシリーズにおすすめです。
-

RCB-4HVボードのみ
コード: 03076 ¥13,200 (税込)シリアルサーボ専用コントロールボード。KHR-3HVやKMRシリーズ、カメ型ロボット02で使用されています。付属のHeartToHeart4を使えば簡単にモーションを作れます。
-

ベアリング付アルミフリーホーン(B3M/KRS-6000シリーズ用)
コード: 02137 ¥1,320 (税込)ベアリング装備でスムーズな両軸支持。高精度、高剛性のアルミフリーホーン。B3M・またはKRS-6000シリーズのボトムケースにある軸に固定して使用します。
-

Dual USBアダプターHS
コード: 02116 ¥6,600 (税込)シリアルUSBアダプターHS(No.02042)とICS USBアダプターHS(No.02043)の機能を統合した、多機能USBアダプターです。スイッチの切り替えで「シリアルモード」「ICSモード」を選択することができます。コントロールボードはもちろん、サーボなどICSデバイスから無線機の設定まで、これ一つで全て通信できます。
-

HV接続ケーブル
コード: 02037 ¥660 (税込)電流を多く流すサーボモーターのために設計された接続ケーブル。KRS-6000/6100/9000/9300シリーズに最適。
-

アルミクランプホーン(KRS-6000HVシリーズ用)
コード: 02031 ¥1,320 (税込)強固な保持力を発揮するアルミ性クランプホーン。 挟み込んで軸に固定するため通常のホーンに比べて保持力がアップします。KRS-6003HVに付属しています。スペアやメンテナンス用におすすめ。B3M-1000/1100にも対応しています。
-

フランジフラットボトムケース
コード: 02027 ¥660 (税込)KRS-6000シリーズのボトムケースをまるごと交換することで、フラットタイプ、フランジ付きボトムケースに変更することが出来ます。二枚を組み合わせるとKRS-6000シリーズをダブルサーボに組みつけられます。
-

軸付きフランジボトムケース
コード: 02025 ¥660 (税込)KRS-6000シリーズのボトムケースをまるごと交換することで、軸付き、フランジつきのボトムケースに変更することが出来ます。
-

フラットボトムケース
コード: 02023 ¥550 (税込)KRS-6000シリーズのボトムケースをまるごと交換することで、軸なしのフラットタイプに変更することが出来ます。
-

ボトムケースセット
コード: 02021 ¥770 (税込)KRS-6003HV標準装備のボトムケース。スペアやメンテナンス用に。