ICS変換基板の使用方法(5) Arduino Nano EveryでKRSサーボを制御
【関連記事】
ICS変換基板の使用方法(3) 無線コントロール編(R4改訂版)
ICS変換基板の使用方法(4) ID読み書き編(R4改訂版)
ICS変換基板の使用方法(4-2) M5StackでID読み書き
ICS変換基板の使用方法(5) Arduino Nano EveryでKRSサーボを制御
ICS変換基板の使用方法(6-1) Arduino MEGAから18個のサーボを制御する
ICS変換基板の使用方法(6-2) 直線補間でサーボを滑らかに動かす
ICS変換基板の使用方法(6-3) Arduino MEGAからKXR-L6の歩行制御
Arduino Nano Everyは、従来のArduino Nanoの進化版です。今回の変更により、シリアル端子がUSBとは別に独立して用意されています。UNO R3ではUSBとシリアル端子が共用でしたのでHardSerialではサーボの情報を取得することができませんでしたが、Everyでは、PCと通信しながらサーボを制御できますので、現在値やIDを取得してPCに表示することができます。この進化は、ロボットで使用する人にとって非常にうれしいポイントです。
今回は、Arduino Nano Everyを利用して、KRSサーボを制御する方法をご紹介します。
※弊社では他社マインボード、及びプログラムに関するお問い合わせついて対応致しかねます。以下の内容は、仕様事例として参考にご一読ください。
■必要な製品
・ICS変換基板 ×1
・KRSサーボ ×1
・ZH接続ケーブルB ×1(サーボ付属)
※KRS-2500/3300の場合
・電源
※下記のどちらかをご用意ください。
サーボに対応する電圧に合わせた電源が必要です。
詳しくは使用するサーボの商品ページをご参照ください。
1)バッテリー+充電器
2)ACアダプター
・HV電源スイッチハーネス、またはLV電源スイッチハーネス
※9~12V電源の場合はHV、6~7.4Vの場合はLVを使用します。
※ICS変換基板のピンヘッダを実装するためにはんだ付けが必要です。
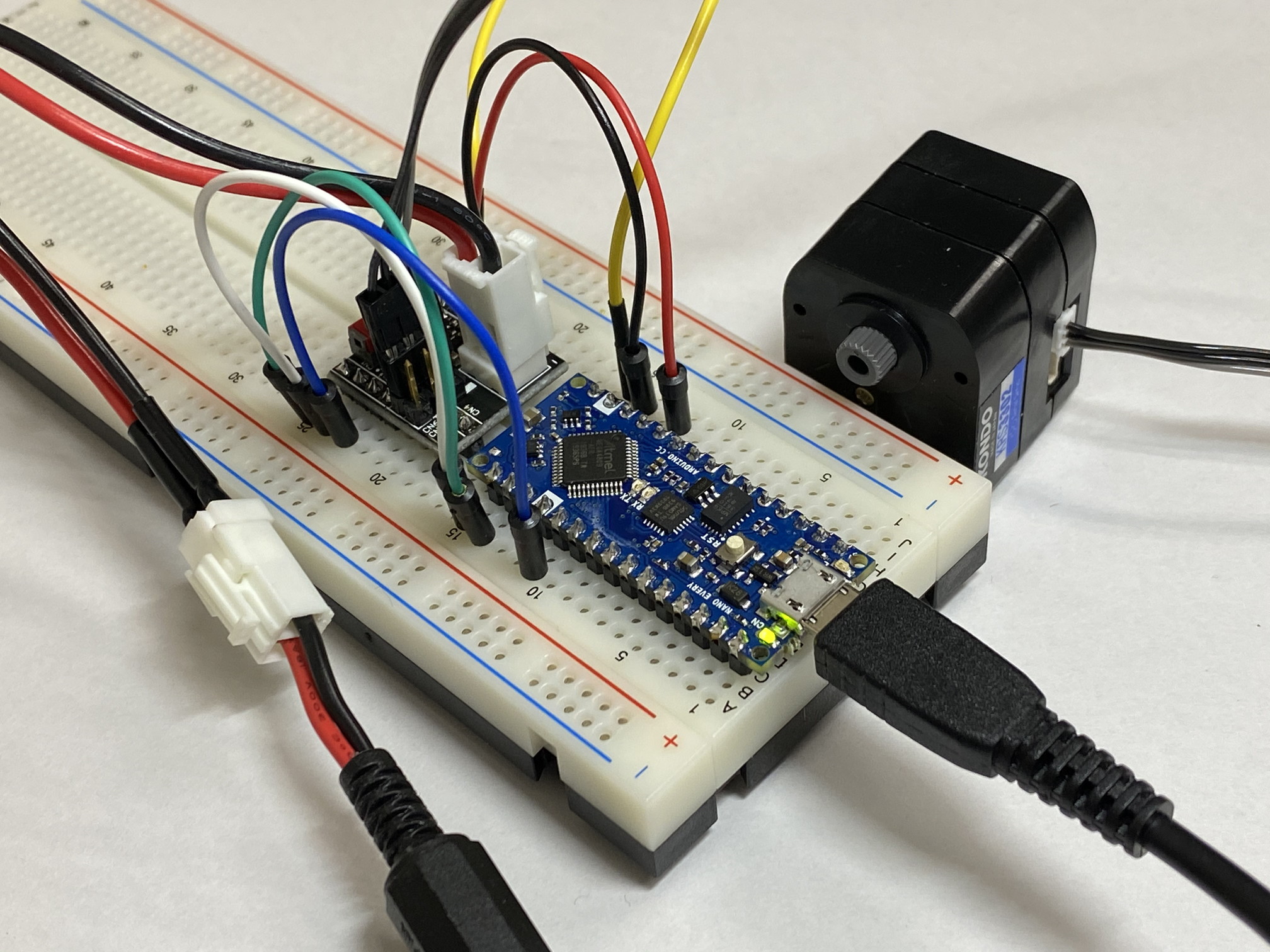
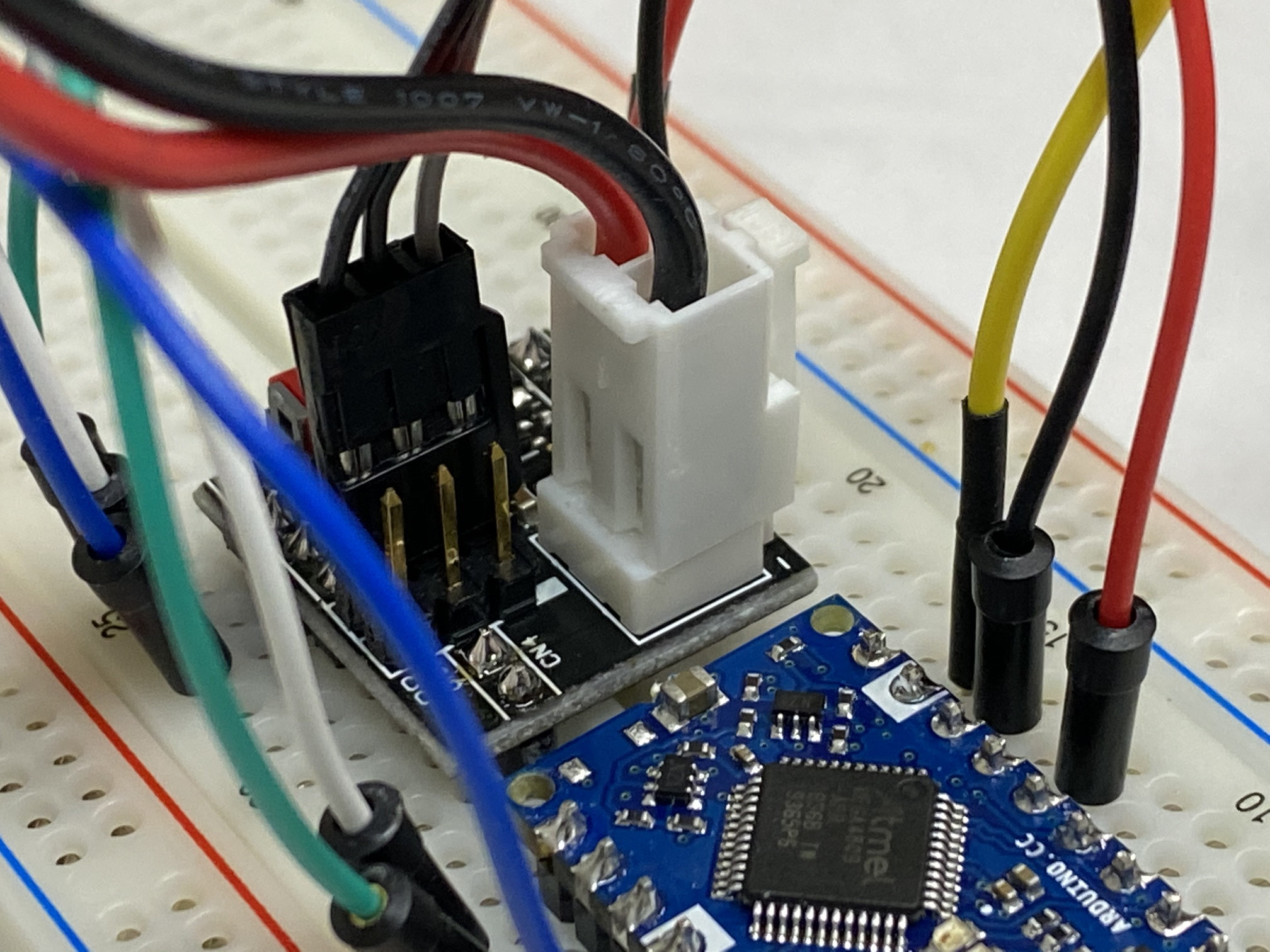
■接続方法
ブレッドボードにICS変換基板とArduino Nano Everyを挿し、下記のように端子同士を接続します。EveryのVINピンはHVの9~12Vでも直接接続できます。
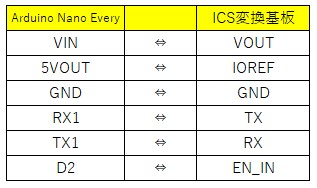
ICS変換基板にサーボを接続します。ケーブルは、片側がサーボ端子のZH接続ケーブルBを使用します。コネクタの爪が電源端子の方に向くように接続してください。
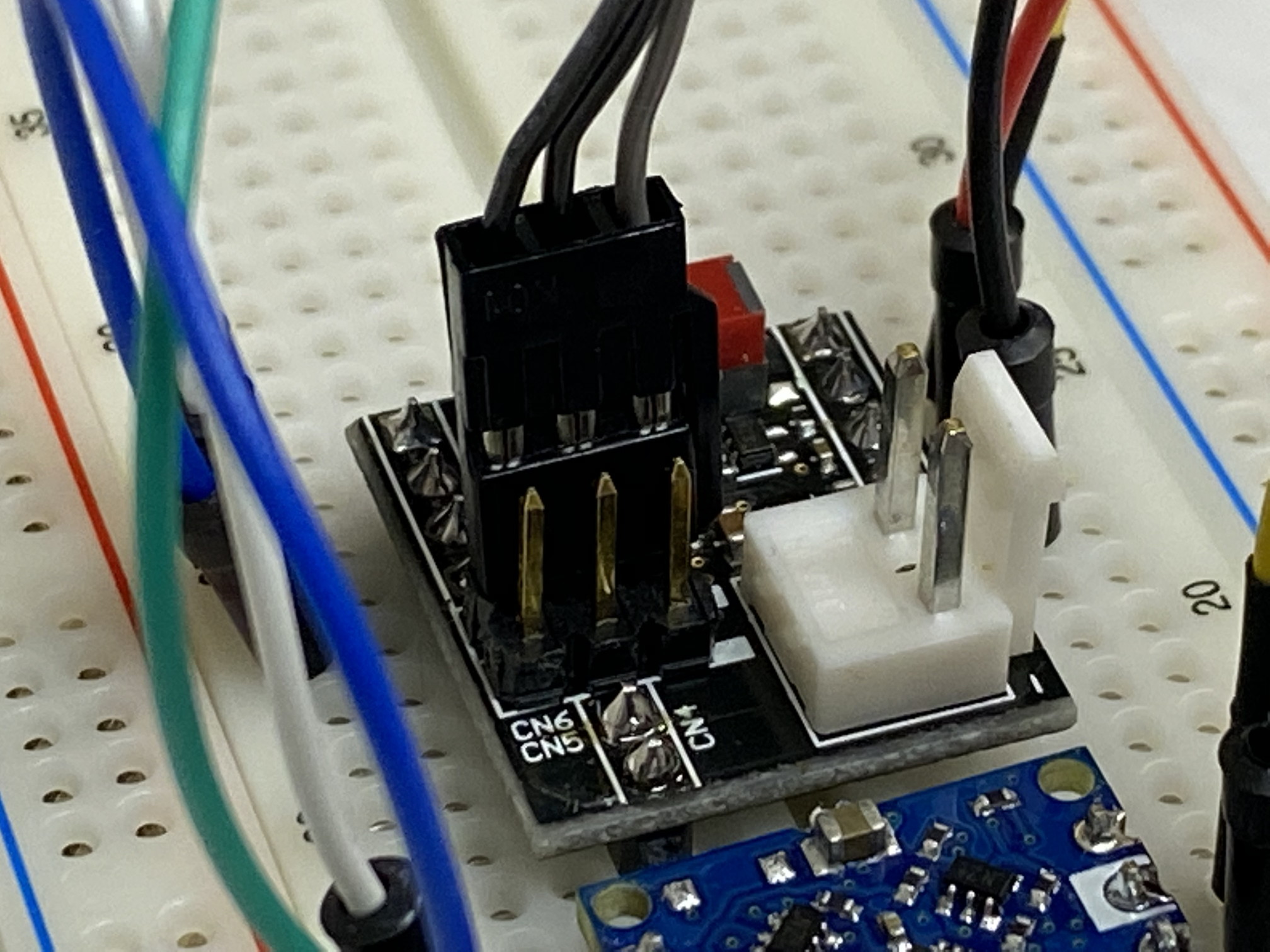
最後にLV電源スイッチハーネスをICS変換基板の電源端子に接続し、スイッチがOFFであることを確認してから電源につないでください。
電源をONにする前に、再度配線を確認し挿し間違い、逆接が無いように十分ご注意ください。
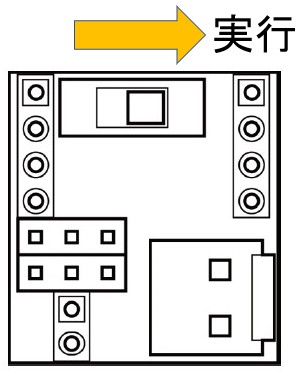
■切り替えスイッチ
ICS変換基板に実装されている「書込」「実行」の切り替えスイッチは、常に「実行」のままにしてください。
■ライブラリ
現在公開しているライブラリをそのまま使用することができます。下記よりライブラリをダウンロードし、付属のマニュアルに従ってインクルードしてください。
サポート記事『ICS Library for Arduino ver.3』
※Arduino Nano Every用に開発環境を設定する必要があります。
■サンプルプログラムでサーボを制御
ICS Library for Arduino ver.3のサンプルプログラムをそのまま使用することができます。また、各サンプルプログラムはシリアルモニタにより結果を表示できるようになっています。
下記は『KrsServo2』を例として掲載しました。こちらはサーボを動かすための基本になる内容です。プログラムを書き込んで電源をONにし、動作確認をしてみてください。ID0のサーボが左右に動けば成功です。
こちらのプログラムの詳しい解説は、付属のマニュアル、または『ICS変換基板の使用方法(2) サーボ制御編(R4改訂版)』をご参照ください。
【プログラム全体】
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 |
#include <IcsHardSerialClass.h> const byte EN_PIN = 2; const long BAUDRATE = 115200; const int TIMEOUT = 1000; //通信できてないか確認用にわざと遅めに設定 IcsHardSerialClass krs(&Serial1,EN_PIN,BAUDRATE,TIMEOUT); //インスタンス+ENピン(2番ピン)およびUARTの指定 void setup() { krs.begin(); //サーボモータの通信初期設定 } void loop() { krs.setPos(0,7500); //位置指令 ID:0サーボを7500へ 中央 delay(500); //0.5秒待つ krs.setPos(0,9500); //位置指令 ID:0サーボを9500へ 右 delay(500); //0.5秒待つ krs.setPos(0,7500); //位置指令 ID:0サーボを7500へ 中央 delay(500); //0.5秒待つ krs.setPos(0,5500); //位置指令 ID:0サーボを5500へ 左 delay(500); } |
■Arduino Nano 33 BLE
Evreyに似た Arduino Nano 33 BLEはArduinoのライブラリ本体のライブラリ側でUARTのパリティを設定しても無視される不具合があるので、現状は使用できません。
※2020/03現在
Arduino nRF528x Boards(Mbed OS) by Arduino ver 1.1.4
使用したい場合はユーザフォルダのAppDataのどこか(Windouws環境)にArduinoのフォルダがあり、のmbedに該当するフォルダを検索していただくとSerial.cppがあるので
UART::begin(unsigned long baudrate, uint16_t config)の内部を書き換えてみてください。
|
1 2 3 4 5 6 7 8 9 |
if(config == SERIAL_8E1) { _serial->format(8,mbed::RawSerial::Even,1); } else { _serial->format(); } |
この修正は暫定的なものです。
作業手順が不明の場合は修正されるまでお待ちください。
Arduino Nano 33 IoTに関しては未確認です。
KRS-9303HV ICSの詳細をみる KRS-9304HV ICSの詳細をみる KRS-2552R3HV ICSの詳細をみる KRS-3204R2 ICSの詳細をみる KRS-2572R2HV ICSの詳細をみる KRS-2552R2HV ICSの詳細をみる KRS-2542R2HV ICS の詳細をみる KRS-9004HV ICSの詳細をみる KRS-5054HV ICS H.Cの詳細をみる KRS-5053HV ICS H.Cの詳細をみる KRS-5034HV ICSの詳細をみる KRS-5033HV ICSの詳細をみる KRS-5032HV ICSの詳細をみる KRS-6104FHV ICSの詳細をみる KRS-3304R2 ICSの詳細をみる KRS-3302 ICSの詳細をみる ICS変換基板の詳細をみる KSBシールド2の詳細をみる ICS変換基板シールドの詳細をみる KXR用オプションボード搭載セットAの詳細をみる KRS-6003R2HV ICSの詳細をみる KRS-6003RHV ICSの詳細をみる KRS-2572HV ICSの詳細をみる KRS-2552RHV ICSの詳細をみる KRS-2542HV ICSの詳細をみる KRS-4037HV ICSの詳細をみる KRS-4034HV ICSの詳細をみる KRS-4033HV ICSの詳細をみる KRS-4032HV ICSの詳細をみる KRS-4031HV ICSの詳細をみる KRS-3304 ICSの詳細をみる KRS-3301 ICSの詳細をみる KRS-3204 ICSの詳細をみる KXR アドバンスセットA Ver.2の詳細をみる KXR-A5 アーム型 Ver.2の詳細をみる KXR-L4T-R カメ型・ローバー型 Ver.2(アカデミックパック)の詳細をみる KXR用オプションボード搭載セットBの詳細をみる