






KRS-3302 ICS
価格: オープン
■6個セット:No.03147 オープン
<スペック>
【7.4V時】
●最大トルク:6.7kg・cm
●最高スピード:0.16s/60°
【6.0V時】
●最大トルク:5.5kg・cm
●最高スピード:0.20s/60°
●寸法:32.5×26×26mm(突起部除く)
(寸法図)
●重量:26.4g
●最大動作角度:270°(±135°)
●ギヤ種類:樹脂ギヤ
●ケース材質:樹脂
●ギヤ比:262.92:1
●電源電圧:6~7.4V
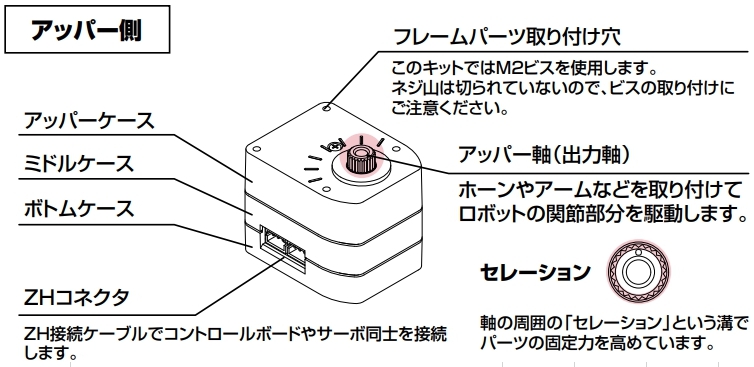
●ケーブル:脱着式
●コネクタ:ZHコネクタ
●通信規格:ICS3.6(シリアル/PWM選択式)
●通信速度:115200/625000/1250000bps
●初期設定:ノーマルモード(PWM/シリアル両対応)
●信号レベル:TTL
●回転モード:可
※温度制限、電流制限非対応
<対応コントロールボード>
●RCB-4mini
●RCB-4HV
●KCB-5
※以下PWM限定
●RCB-3HV
●RCB-3J
※RCB-3でご利用いただく場合はこちらの記事をご一読ください。
<インターフェース>
●Dual USBアダプターHS
●ICS USBアダプターHS
<付属品>
【単品】
ZH 接続ケーブル2A (300mm) ×1 本
ZH 接続ケーブル2B (300mm) ×1 本
M3×6 低頭ホーン止めビス ×1 本
【6 個セット】
ZH 接続ケーブル2A (300mm) ×6 本
ZH 接続ケーブル2B (300mm) ×6 本
M3×6 低頭ホーン止めビス ×6 本
Made in Japan
商品説明
KRS-3302 ICSは、キューブタイプデザインの小型サーボです。樹脂ギヤ、コアードモータを採用し手軽な価格帯でありながら、スムーズな動作と程よいトルクを実現しました。
金属ギヤでハイトルクなKRS-3304R2 ICSとケースが同寸法ですので、同じフレームを使用して組み込めます。
低価格サーボでありながら、ギヤのかみ合わせを妥協せず設計しました。これにより、静音で滑らかな動作を実現しました。
KRS-3302はICS3.6を採用しました。ICS3.6では、現在値を取得するためのコマンドが用意されています。ストレッチやスピードを読み込むコマンドと同じように現在値を読み込めますので、プログラムでサーボを制御する際に便利です。
【KRS-3301との違い】
KRS-3302は、パワフルなモータを新規採用しました。この新モータは、構造も通常のものとは異なり、モータ管を断面を見ると正方形になっています。
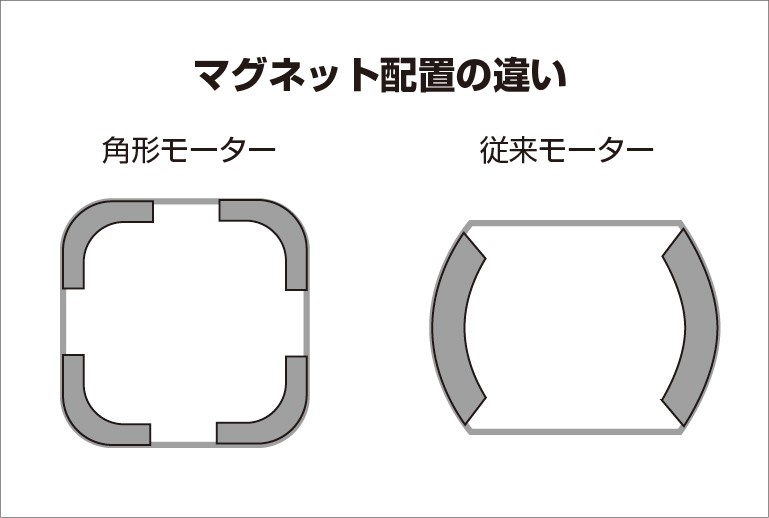
従来の俵型モータは管に磁石が二か所接着されていますが、この正方形のモータ管は、四隅にそれぞれ磁石が接着されています。これにより、回転子の直径を大きく取ることが可能になるため、従来より高いトルクを出力できるようになりました。
また、軸の保持力も強くなり、より安定したモーション再生ができるようになりました。二足歩行ロボットの歩行や起き上がりモーションでその差を実感いただけます。さらに、ハンチング(サーボの軸が振動する現象)が起こりにくくなりました。
【オプションについて】
ケース、ギヤはすべてKRS-3301と共通です。オプションも共通の商品をご利用いただけます。もちろん、ケースサイズが同じですので、KXRシリーズのすべてのパーツと組み合わせられます。
■ギヤ:樹脂ギヤ
ギヤのかみ合わせを0.01mm単位で調整し、スムーズで滑らかな動作を実現しました。

■ケース:KRS-3300シリーズ
キューブタイプのためどの向きで配置してもシルエットが大きく変わりませんので、ロボットのスタイルを崩しません。また、表面に凹凸が少ないためフレームの設計と装着が容易です。
※補修パーツのケースは「サーボケース KRS-3301用」に対応しています。「サーボケース KRS-3300シリーズ用」は使用できませんのでご注意ください。

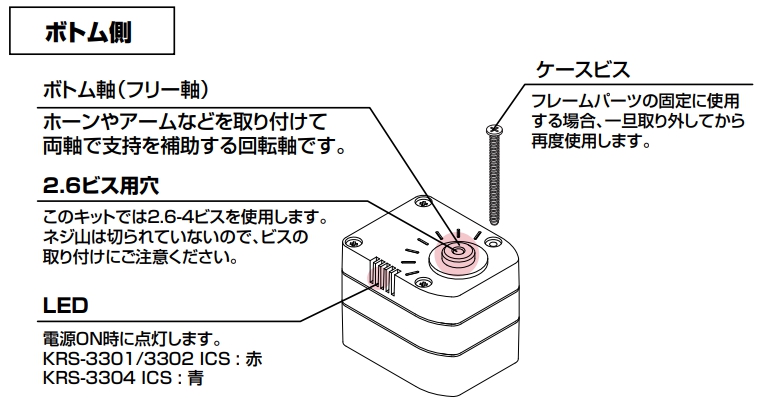
・フリーホーンを取り付け可能
ボトムケースには、出力軸のホーンと対になるフリーホーンを固定できます。ホーン固定部にはメタルインサートが埋め込まれていますので、従来よりしっかりとした固定が可能です。
対応オプション:小径フリーホーンC(PCDΦ12-M2-オフセット0)


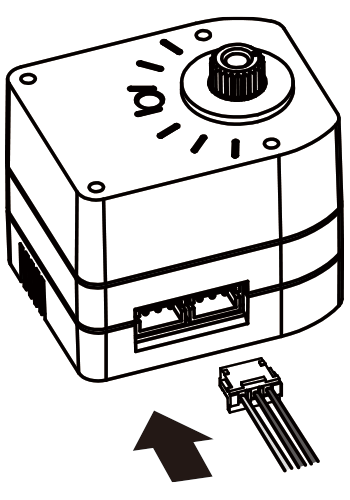
・ケーブル脱着式
ケーブルは脱着式で好きな長さのケーブルに交換することができます。コネクタが2つ実装されていますので、サーボに任意のIDを割り振ることによりサーボ同士を数珠状につなぐデイジーチェーン接続をすることが可能です。
対応オプション:ZH接続ケーブル2A / ZH接続ケーブルA
ZH接続ケーブル2B / ZH接続ケーブルB
■通信仕様:ICS3.6
ICS3.6は、ICS3.5の上位互換仕様です。3.5の内容に現在値を取得するコマンドを実装しました。
通信には、これまで通りシリアルとPWMを選択できます。
制御するマイコンボードに合わせてサーボの通信を変更することが可能です。
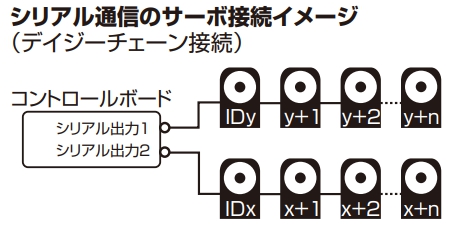
また、シリアルモードではサーボにIDを割り振ることができますので、サーボ同士をつなげるマルチドロップ接続が可能です。
■KRS-3301/3302/3304/3304R2は混在可能です。
マルチドロップ接続で使用する際に、KRS-3300シリーズ各種は混在して使用することができます。また、KXRシリーズのパーツ類は共通でお使いいただけます。
(出力軸は固定物により異なりますので、各組立説明書をご参照ください)
■マニュアル
『ICS3.5 / 3.6ソフトウェアマニュアル(コマンドリファレンス)』
■寸法図

フレームの設計用に3D、2Dの寸法図をダウンロードしてご利用いただけます。こちらのページをご参照ください。
■各部名称
■搭載方法
●サーボケースへのパーツ固定
ボトムケース側は、ケースビスを一度取り外してからフレームに共締めしてください。
アッパーケース側(出力軸側)は、2mmのビスが対応しています。フレームの厚さに合わせて長さを決めてください。
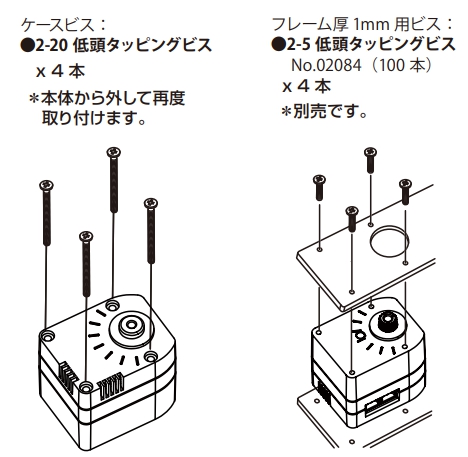
対応オプション:
2-5低頭タッピングビス
2-8低頭タッピングビス
KXRシリーズの組み立てに最適なビスをセットにしました。便利なパーツケース入りです。
●軸へのパーツ固定
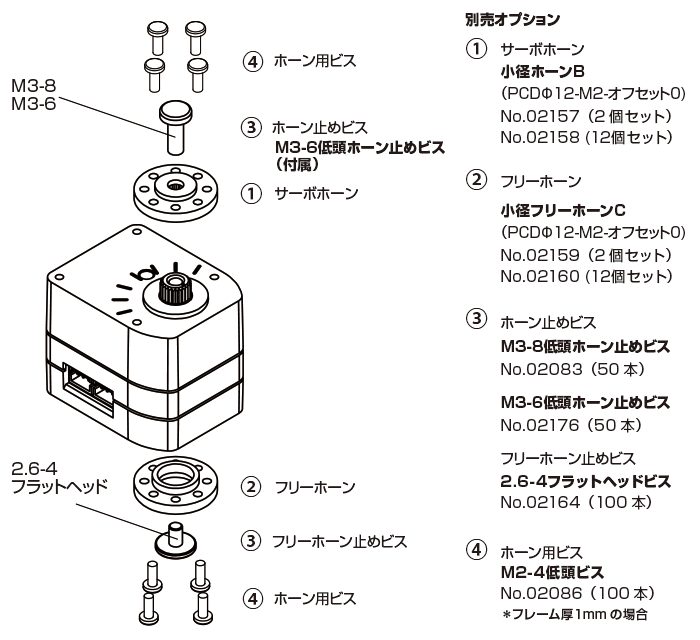
対応オプション:
小径ホーンB(PCDφ12-M2-オフセット0)
M3-6低頭ホーン止めビス
M3-8低頭ホーン止めビス
小径フリーホーンC(PCDφ12-M2-オフセット0)
2.6-4フラットヘッドビス
●豊富なオプションパーツ
KRS-3300シリーズは、KXRロボットシリーズの豊富なフレームパーツをすべて使用することができます。サーボアームやスペーサなど便利なパーツが揃っていますので、設計や工作をすることなくオリジナルロボットを組み上げることが可能です。
■制御方法
●コントロールボードRCB-4から制御する

RCB-4HVまたはRCB-4miniとモーション作成ソフトHeartToHeart4を組み合わせて簡単にサーボを制御することができます。RCB-4HVは、2系統のサーボなどICSデバイス用を制御する端子を装備し、アナログセンサー用の端子を10ポート、デジタルI/O端子を10ポート用意しています。
RCB-4miniは、小型ロボット用にコンパクト設計されていますので2系統のシリアルポートと、5ポートのアナログセンサー端子を使用できます。PIO端子は実装していません。
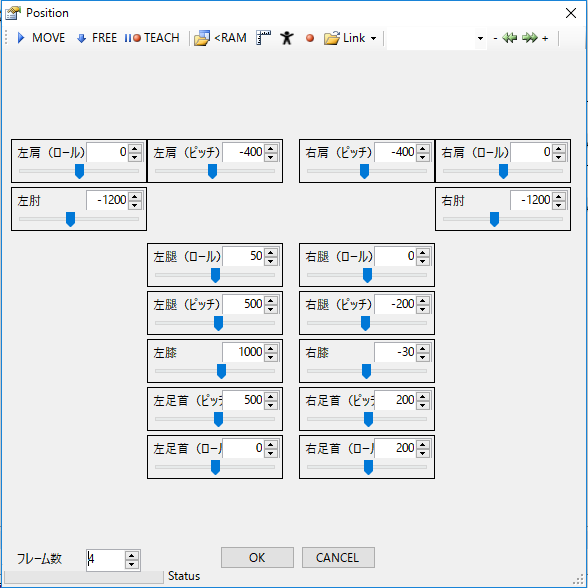
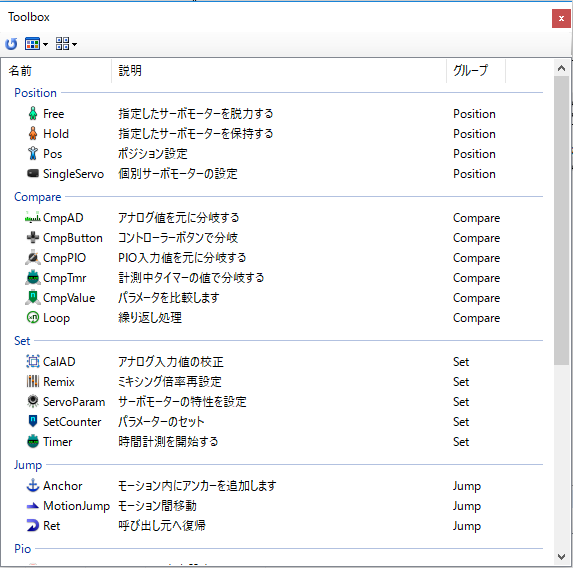
HeartToHeart4は、様々な機能を持つコントロール(パネル)を並べることでモーション作りが可能です。簡単な「あいさつ」などのモーション作成から、センサーや無線コントローラのボタンによる分岐など複雑なモーションも作成可能です。
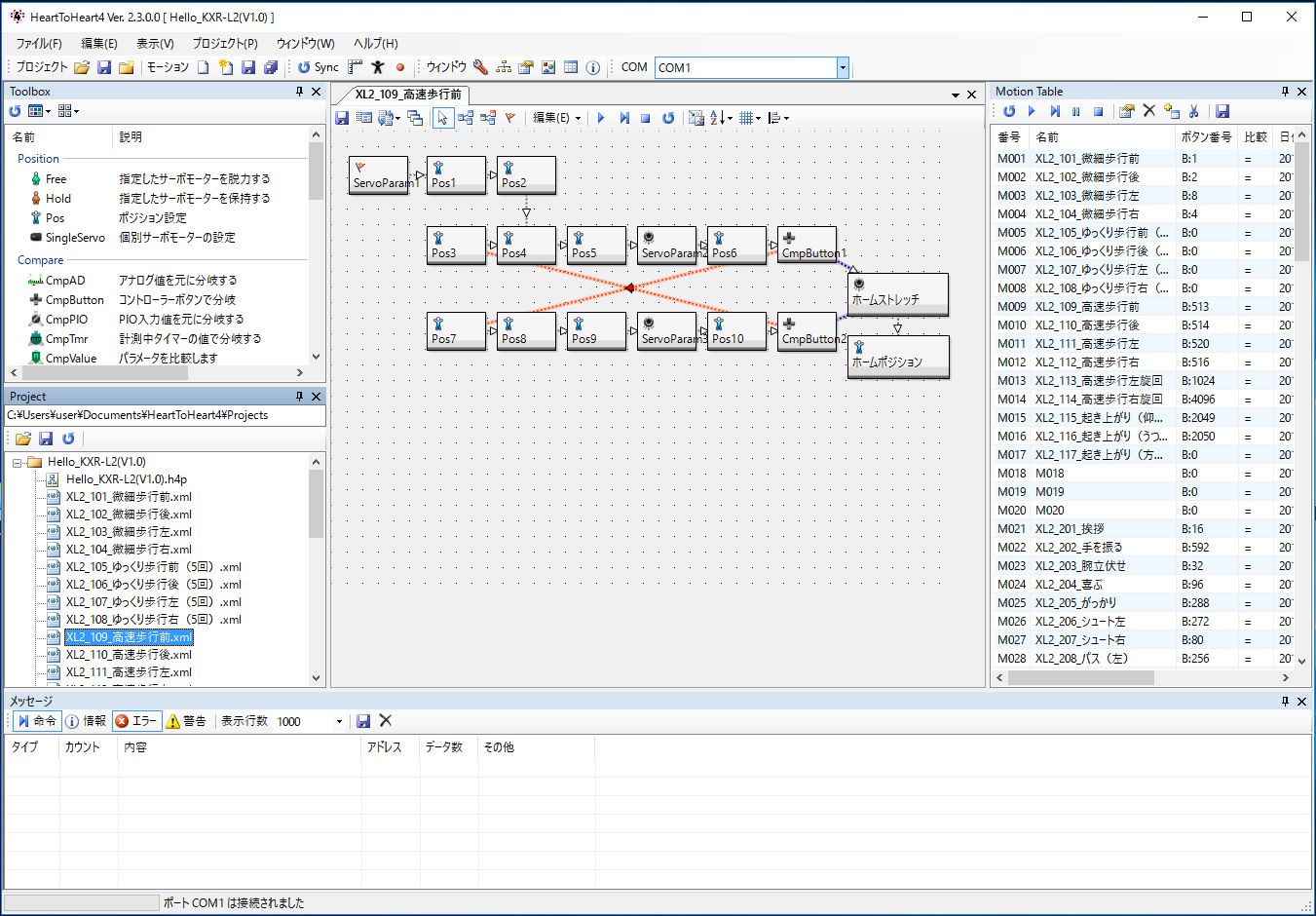
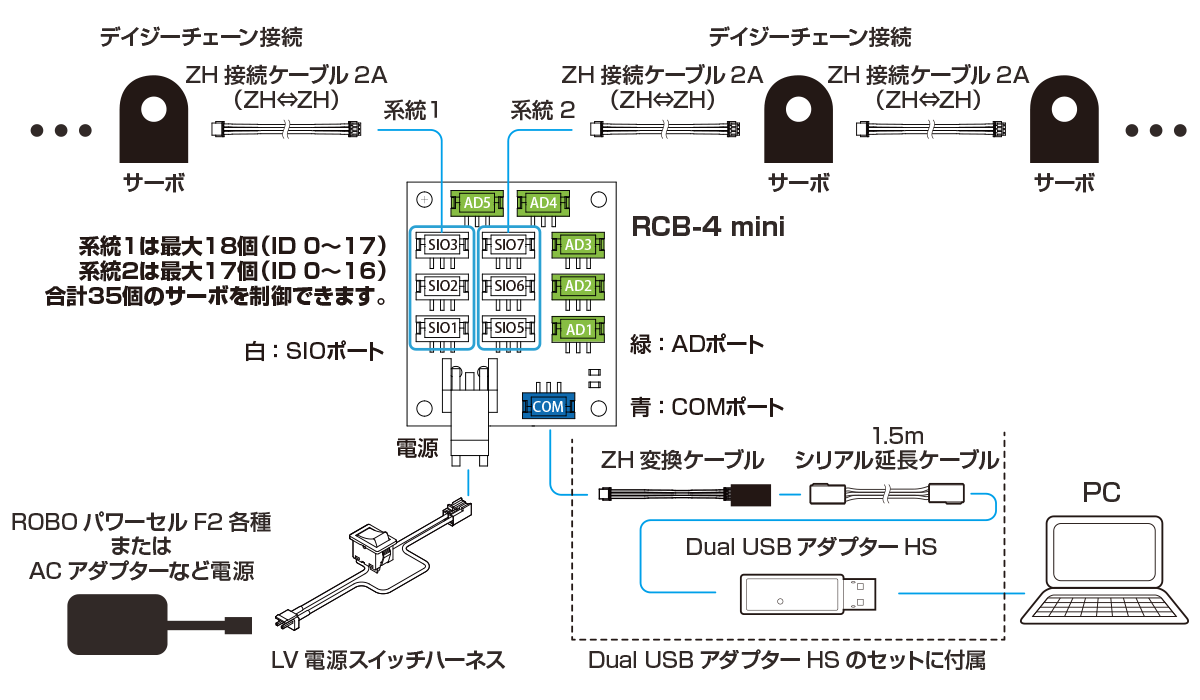
サーボは、それぞれにID番号を割り振り、デイジーチェーン接続によりデバイス同士を接続して通信します。

詳しい使い方は『HeartToHeart4講座』をご一読ください。
【必要な製品】
・RCB-4HV またはRCB-4mini
・Dual USBアダプターHS
・LV電源スイッチハーネス
【構成図】
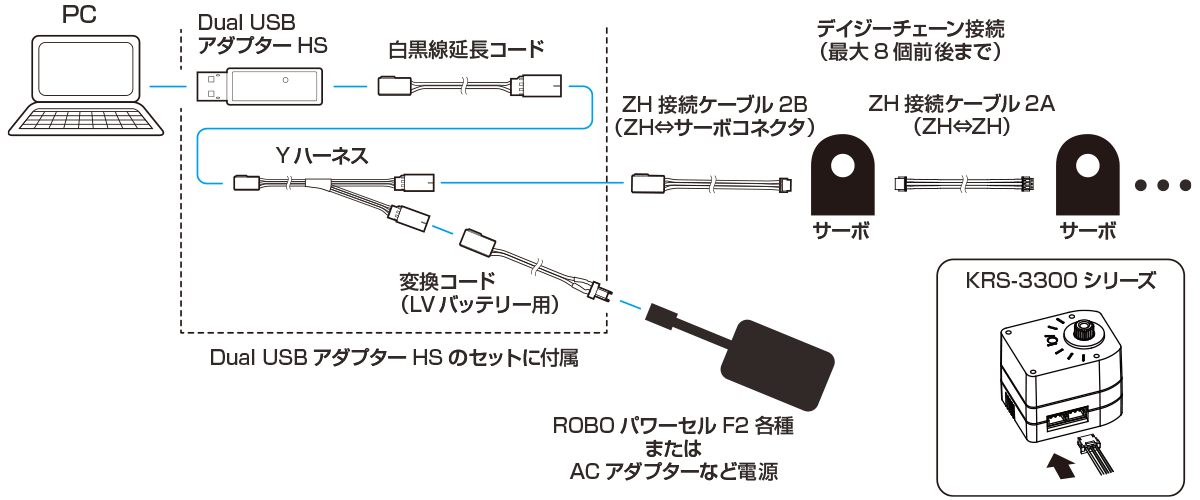
●PCから制御する

Dual USBアダプターHSを使用することで、PCから直接サーボを制御することができます。公開されているソフトウェアマニュアル(コマンドリファレンス)をもとにコマンドを送信します。通信方法やサンプルも公開されていますので、詳細は下記の記事をご覧ください。
『シリアルサーボ制御方法(4) PCから直接制御編(その1)』
『シリアルサーボ制御方法(5) PCから直接制御編(その2)』
【必要な製品】
(電源の接続には別途2pinの電源用ケーブルが必要です)
【構成図】
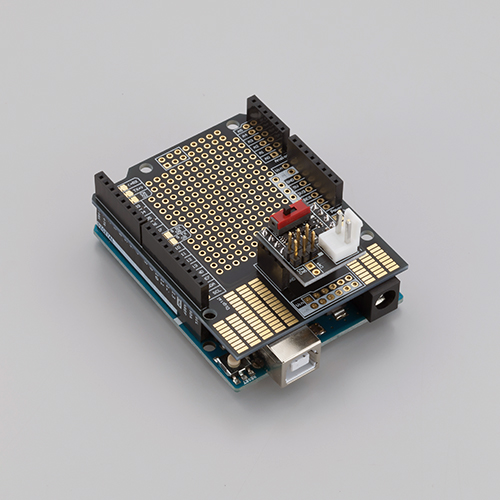
●市販のマイコンボード、小型PCボードから制御する
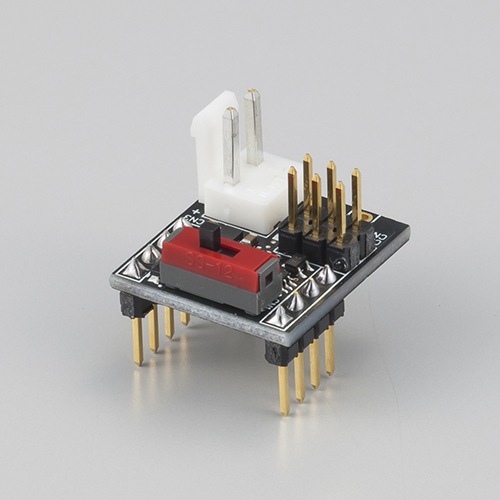
市販ボードのUART端子からサーボなどICSデバイスを制御することができます。ICSデバイスは、信号線のTx(送信)とRx(受信)が一体になっていますので、UARTに接続する場合は別途回路が必要でしたが、この変換基板を使用することで端子の接続のみ行えばICSデバイスとの通信ができるようになります。通信方法、コマンドについてはソフトウェアマニュアル(コマンドリファレンス)をご参照ください。
【必要な製品】
※Arduino UNOで使用する場合
・KSBシールド2 ×1
Arduino用のライブラリを公開しました。下記よりダウンロードしてご利用ください。
『ICS Library for Arduino ver.3』
★Arduinoライブラリの詳細な使用方法はこちらの記事をご覧ください。
『ICS変換基板の使用方法(2) サーボ制御編(R4改訂版)』
『ICS変換基板の使用方法(4-2) M5StackでID読み書き』
『ICS変換基板の使用方法(5) Arduino Nano EveryでKRSサーボを制御』
『ICS変換基板の使用方法(6-1) Arduino MEGAから18個のサーボを制御する』
【構成図】

●シリアルマネージャー
ICS3.5/3.6 マネージャーソフトウエアを使用することで、サーボのIDや通信速度を設定することができます。また、ストレッチやスピードなど各種パラメータの変更も可能です。
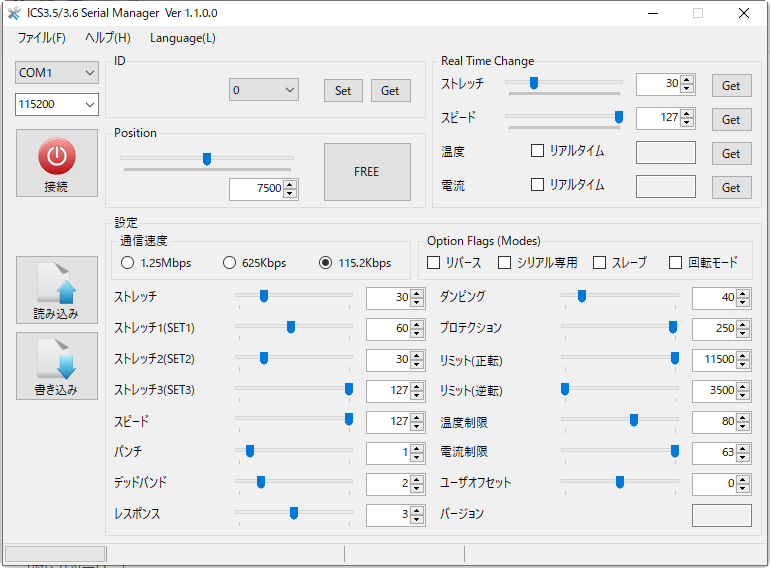
『ICS3.5/3.6 Manager software R1.1.0.0』
■電源
【対応バッテリー】
LVサーボには、2セル(6.6V)のリチウムフェライトバッテリーをご利用ください。


※バッテリーの取り扱いには注意が必要です。こちらの注意事項をよくお読みになってからご利用ください。
また、ニッケル水素タイプの6セル(7.2V)バッテリーもご利用できます。

・ROBOパワーセル Eタイプ 6N-800mAh(Ni-MH)
【充電器】



※BX-31LF/32MHは、PCのUSB端子からは充電できません。スマートフォンの充電などで使用するACアダプター(2A推奨)をご利用ください。
【ACアダプター】
アームロボットなど数個のサーボでしたら以下のACアダプターをご利用いただけます。ご利用の際は電流の容量にご注意ください。

KRSサーボに関する情報は、「ICS・KRSサーボ開発資料」にまとめてご用意しています。また、の「テクニカルガイド」にもロボットに関する様々な情報を公開していますので、ぜひご参照ください。
【注意事項】
※本製品は6~7.4V対応サーボです。HV対応バッテリーには対応しておりません。
※RCB-4HV/3HVとNi-MH5セル(6V)、Li-Fe2セル(6.6V)の組み合わせで
ご利用いただく場合は、ブースター3.1(昇圧回路)をご利用ください。
Li-Po2セル(7.4V)をご利用の場合は、特に必要ありません。
また、RCB-4miniでも必要ありません。
・ブースター3.1【RCB-4HV用】
・ブースター3.1【RCB-3HV用】
※出荷時通信モードは「ノーマルモード」ですので、
電源投入後の信号線のHigh/Lowによりシリアルモードと
PWMモードを切り替えることができます。
RCB-4で使用した場合は、自動でシリアルモードとして認識されますので、
サーボのID番号を割り振ってからご利用ください。
通信仕様の詳細はソフトウェアマニュアルをご参照ください。
シリアル専用(PWM禁止)で使用したい場合は、別売りの
Dual USBアダプターHSで切り替えてください。
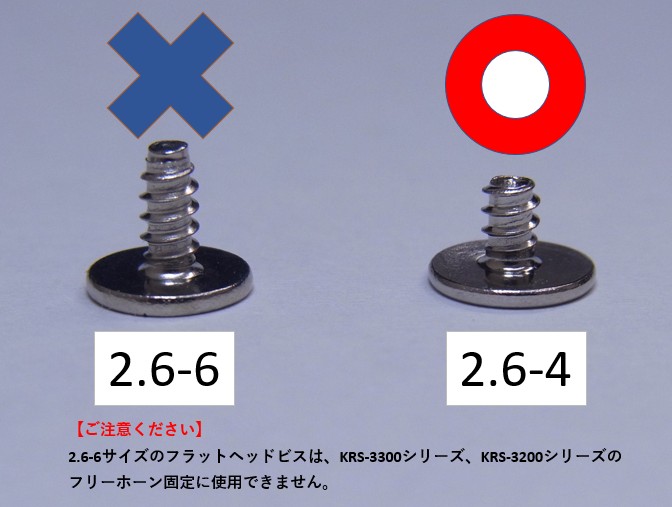
※フリーホーン側の固定ビスには、2.6-4フラットヘッドビスをご利用ください。
KHR-3HVなどに付属する2.6-6フラットヘッドビスを使用しますと、ケースを貫通し
基盤を破損してしまう場合がございます。
※アッパーケースへのフレームの固定には、2mmのビスをご利用ください。
※本製品は温度センサ、電流測定回路を実装していないため温度制限、電流制限をご利用できません。
プロテクションタイマはご利用いただけます。
関連するオプション
-
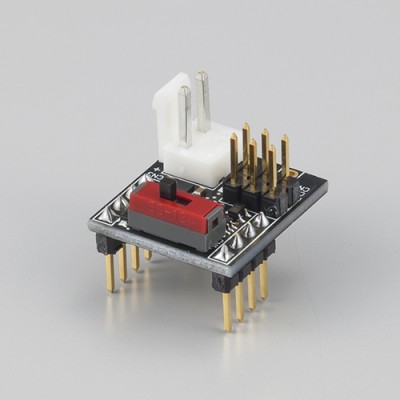
ICS変換基板
コード: 03121 ¥1,980 (税込)KRSサーボなどICSデバイスとマイコンのUARTを接続するための変換基板です。
-

ROBOパワーセル Eタイプ 6N-800mAh(Ni-MH)
コード: 02335 ¥3,850 (税込)ロボット用ニッケル水素バッテリー。KXRシリーズ標準品です。KXR用バッテリーボックスにちょうど収まるサイズです。
-

ACアダプター(6V2A)
コード: 03141 ¥2,970 (税込)KXRなど6~7.4Vサーボを使用したロボットに最適なACアダプターです。LV変換DCジャックが付属します。
-

M3-6低頭ホーン止めビス
コード: 02176 ¥550 (税込)KRS-3300、3200シリーズの出力軸へホーンなどを固定するときに最適なビスです。
-

RCB-4mini
コード: 03120 ¥10,780 (税込)ICS3.0/3.5/3.6対応シリアル専用のロボット用コントロールボードです。サーボ単体の制御からロボットを制御するためのメインボードとして使用できます。RCB-4HVのミニサイズ版です。
-

樹脂ギヤセット 【KRS-3301/3302用】
コード: 02181 ¥330 (税込)KRS-3301標準の樹脂ギヤセットです。 メンテナンス用におすすめです。
-

ケースビスセット KRS-3300シリーズ用(20本入り)
コード: 02183 ¥440 (税込)KRS-3300シリーズ用のケースビスです。 NO.02142 / 02182に使用できます。 メンテナンス用におすすめです。
-

サーボケース KRS-3301/3302用
コード: 02182 ¥660 (税込)KRS-3301/3302用のサーボケースです。 メンテナンス用におすすめです。
-

小径ホーンB(PCDφ12-M2-オフセット0)
コード: 02157 ¥330 (税込)小径ホーンのBタイプ。KRS-2500シリーズ、3200シリーズ、3300シリーズに対応します。
-

小径フリーホーンC(PCDφ12-M2-オフセット0)(2個入り)
コード: 02159 ¥330 (税込)小径フリーホーンのCタイプ。KRS-2500シリーズ、3200シリーズ、3300シリーズに対応します。
-

ROBOパワーセル F2-850タイプ (Li-fe)
コード: 02167 ¥2,970 (税込)ロボット用リチウムフェライトバッテリー。2セル / 6.6V / 850mAh。XHバランス充電端子付き。KRS-3300シリーズやKRS-3204 ICSなど6Vサーボにおすすめです!
-

ROBOパワーセル F2-1450タイプ (Li-fe)
コード: 02168 ¥3,520 (税込)ロボット用リチウムフェライトバッテリー。2セル / 6.6V / 1450mAh。XHバランス充電端子付き。KRS-3204 ICSなど6Vサーボにおすすめです!
-

RCB-4HVボードのみ
コード: 03076 ¥13,200 (税込)シリアルサーボ専用コントロールボード。KHR-3HVやKMRシリーズ、カメ型ロボット02で使用されています。付属のHeartToHeart4を使えば簡単にモーションを作れます。
-

Dual USBアダプターHS
コード: 02116 ¥6,600 (税込)シリアルUSBアダプターHS(No.02042)とICS USBアダプターHS(No.02043)の機能を統合した、多機能USBアダプターです。スイッチの切り替えで「シリアルモード」「ICSモード」を選択することができます。コントロールボードはもちろん、サーボなどICSデバイスから無線機の設定まで、これ一つで全て通信できます。