6VサーボをRCBで制御するための電源について
リチウムフェライトバッテリー(Li-Fe)は、ニッケル水素バッテリーに比べて大電流を流しやすく、ロボットをより安定して動かすことができます。さらに、メモリー効果がほとんどありませんので追い充電することができますし、自己放電も少ないので長期間の保存に優れ、メンテナンス性も優れていますので、ロボット用の電源としておすすめです。
弊社で発売しているLi-Feバッテリーの電圧は、2セル(6.6V)タイプと3セル(9.9V)タイプの2種類あります。1セル(電池でいう1本)の電圧が3.3Vですので、それぞれ2倍、3倍の電圧になります。KHR-3HVなどに搭載されているHV対応サーボは3セルタイプを、KRS-3204など6V~7.4V対応サーボは2セルタイプを使用します。
■3セル(9.9V)

■2セル(6.6V)

リチウムフェライトバッテリーに関しましてはこちらの記事も合わせてご覧ください。
■サポート記事『Li-Feバッテリーのメリットと注意事項』
6V以上対応のサーボはRCBのコントロールボードにて制御できますが、ボード内部の電源電圧が5Vで動作しているため、2セル(6,6V)ではサーボが踏ん張った時、電力が不足することで一瞬電圧が低下した場合に、5Vを下回るとボードがリセットしてしまう場合があります。万が一イベント中にロボットにリセットがかかると一大事ですので、Li-Fe2セルを使うときには予防としてブースター3.1を搭載することをお勧めします。
※RCB-4miniでは必要ありません。
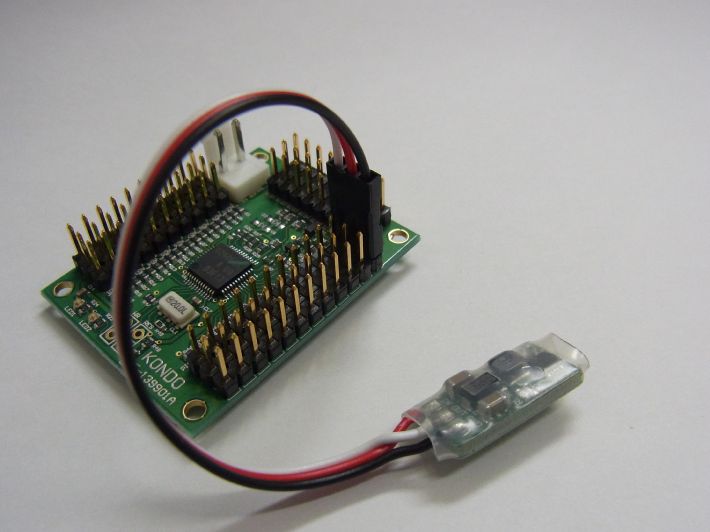
【昇圧回路 ブースター3.1】
ブースター3.1は外付けの昇圧回路です。ボードに入力される電圧が低下したとしても、一時的に5.7Vまで昇圧し、5Vを下回らないようにします。
<注意事項>
※リフェ2セルを使用すると必ずリセットが起こるというものではありません。ブースターの搭載は予防対策としてお勧めします。
※使用しているサーボの数、バッテリーの充電状態など、ロボットの状態によってはブースターを搭載してもリセットがかかる場合があります。
※ブースター3.1は、最大定格電圧が12Vまでとなっていますので、3セルのリチウムポリマーバッテリー(Li-Po / 11.1V)には使用しないでください。
■用意するもの
・ブースター3.1(RCB-3HV用)または(RCB-4HV用)
ボードの種類によって、RCB-4HV向け、RCB-3HV向けの2種類があります。
使用するボードにあったものをご用意ください。


左がRCB-3HV用、右がRCB-4HV用です。基板にはんだ付けされた白、赤線がケーブルがクロスしている方が4HV用です。
■接続手順【RCB-4HV編】
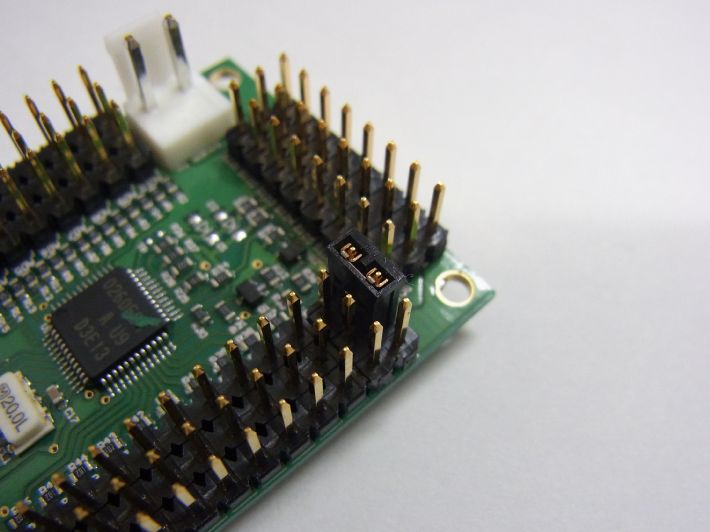
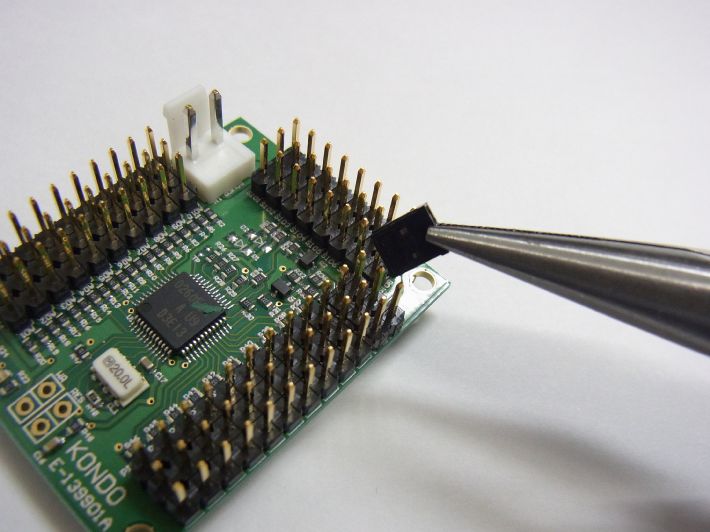
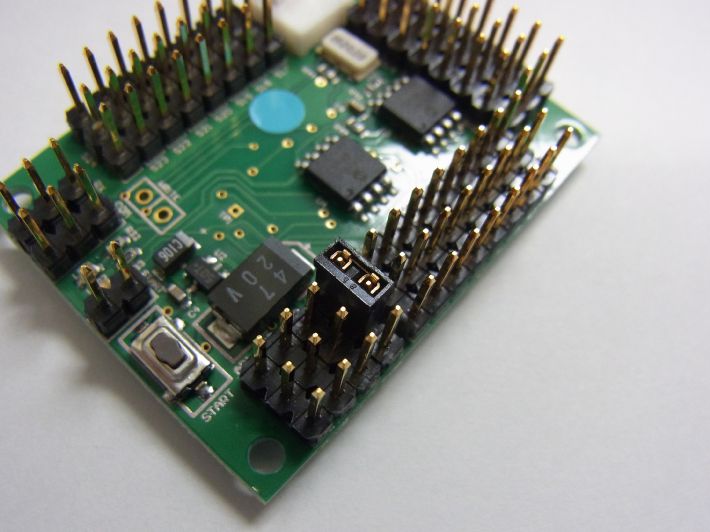
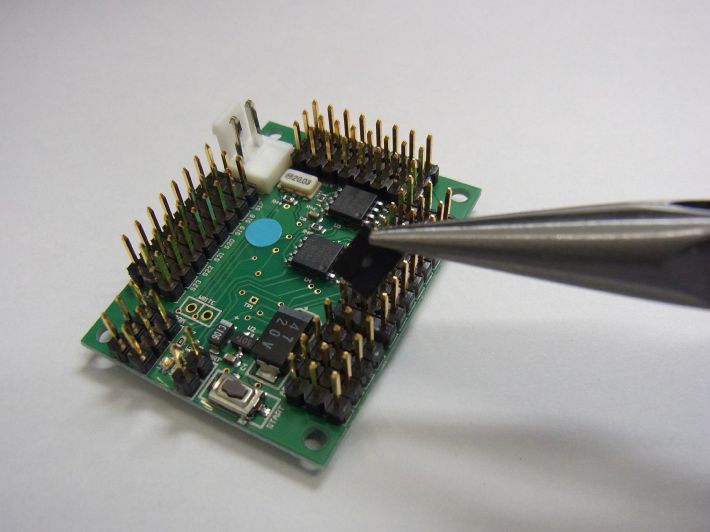
1) ボードのジャンパーピンを抜きます。
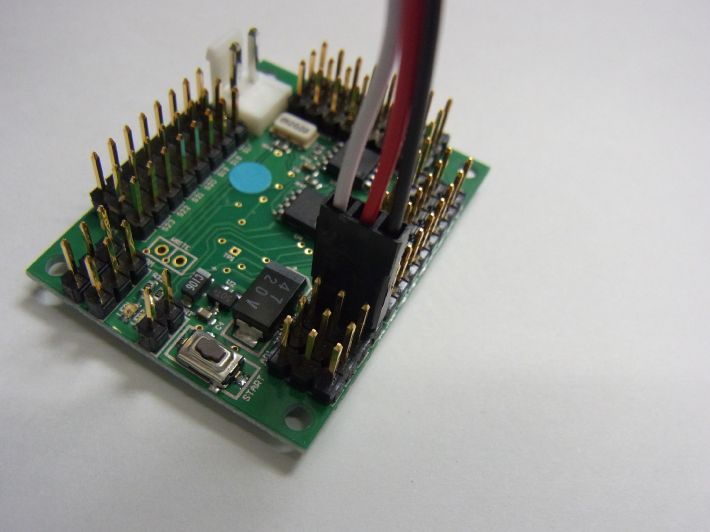
2) ヘッダピンを抜いた端子にブースター3.1を接続します。白線がボードの内側に来るよう極性にご注意ください。
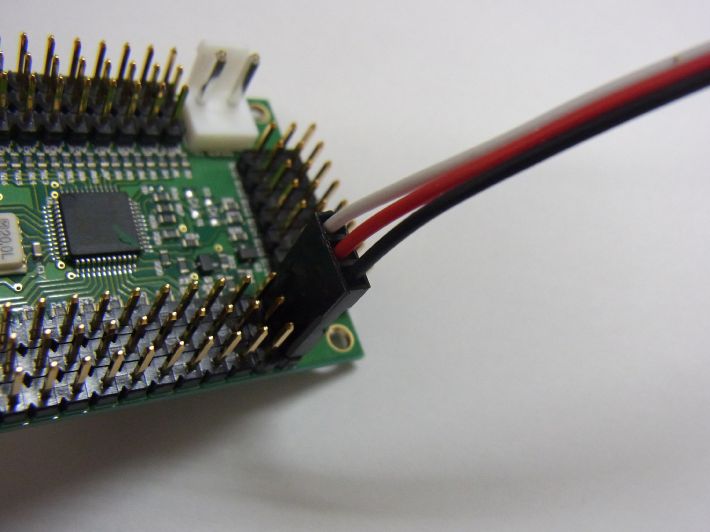
以上です。非常に簡単に接続できます。
■接続手順【RCB-3HV編】
1) ボードのジャンパーピンを抜きます。
2) ヘッダピンを抜いた端子にブースター3.1を接続します。白線がボードの内側に来るよう極性にご注意ください。
手順はRCB-4HV編と全く同じで簡単です。
■スイッチハーネスについて
バッテリーと基板の接続にはスイッチハーネスがお勧めです。従来のスイッチハーネスは、バッテリー側が3ピンですが、2セルタイプのコネクタに合わせて2ピンタイプのスイッチハーネスをご用意しました。

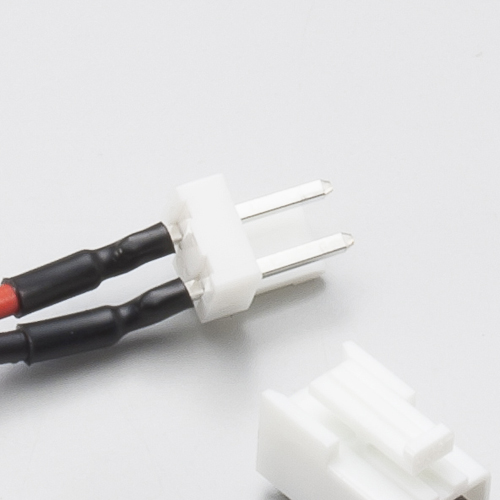
こちらもぜひご利用ください。
以上です。
KRS-3304R2 ICSの詳細をみる KRS-3302 ICSの詳細をみる KRS-3301 ICSの詳細をみる KRS-3304 ICSの詳細をみる KRS-3204 ICSの詳細をみる の詳細をみる ROBOパワーセル F3-1450タイプ (Li-fe)の詳細をみる ROBOパワーセル F3-2100タイプ (Li-fe)の詳細をみる ROBOパワーセル F2-850タイプ (Li-fe)の詳細をみる ROBOパワーセル F2-1450タイプ (Li-fe)の詳細をみる ブースター3.1【RCB-3HV用】の詳細をみる ブースター3.1【RCB-4HV用】の詳細をみる RCB-4HVボードのみの詳細をみる RCB-3HVボードのみの詳細をみる