
KXR-L2に脚の旋回軸を追加する
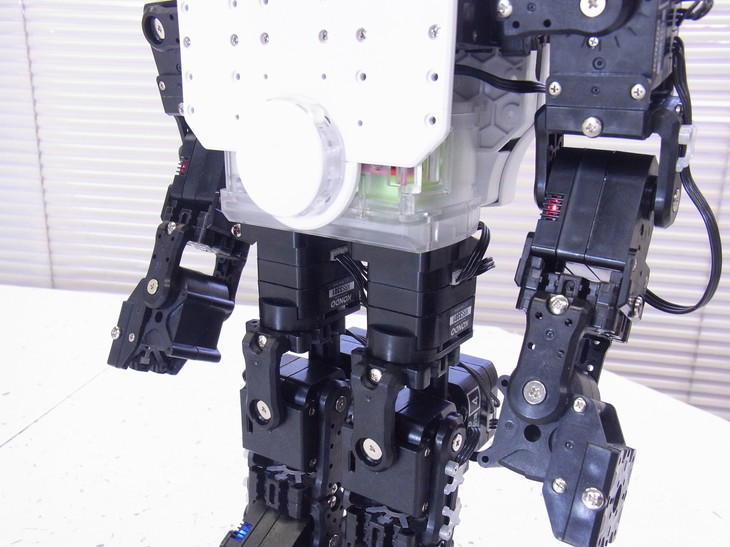
KXR-L2は、パーツの組み合わせにより両足の旋回軸を追加することができます。旋回軸を追加することにより、標準の地面をこすって旋回する方法から足を上げての旋回が可能になります。絨毯の上やグリップの大きい路面では脚を上げての旋回が大変有効です!ぜひお試しください。
今回の改造は、前回で脚部をKRS-3304に換装した状態のヒューマノイド型を使用して追加方法をご紹介します。
※2017.7.22 追記
ロボットに搭載しているサーボが19個以上の場合は、全てのサーボのICS通信速度を1250000bpsに設定してください。このブログの最後に公開しているサンプルプロジェクトは、ICS通信速度を1250000bpsで設定されていますのでご注意ください。
■必要なパーツ
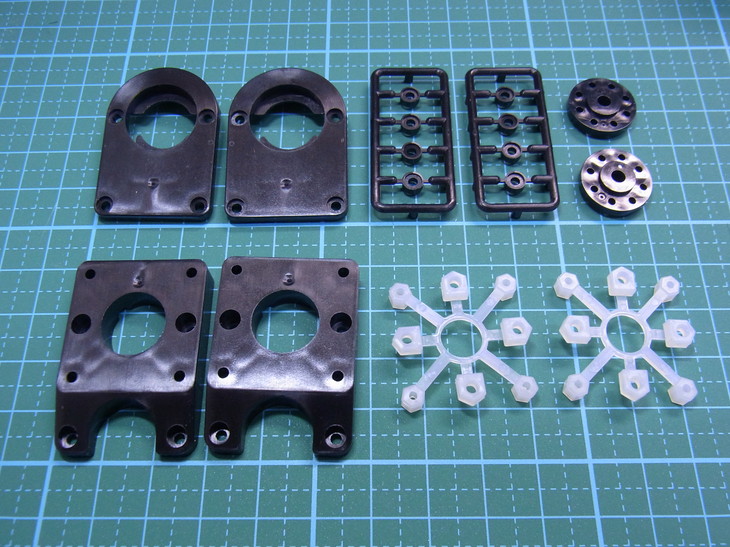
・KRS-3301 ICS ×2
(KRS-3304 ICSでも可)
・アームサポーター3300B ×2
・サポーターBスペーサー ×2(ランナー)
・ボトムスペーサー3300A ×2
・ジョイントナット ×2
・小径ホーンB ×2
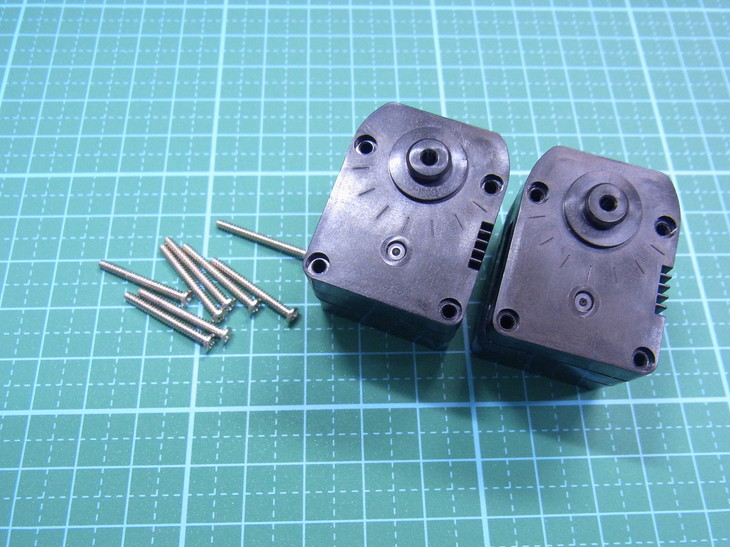
・ビス類
■搭載方法
1)股関節のM2.6-10ビスを取り外し、胴体から脚部を分離します。

2)ボディーパネルのロックリングキャップ、ロックリング、パネルスペーサーを外します。
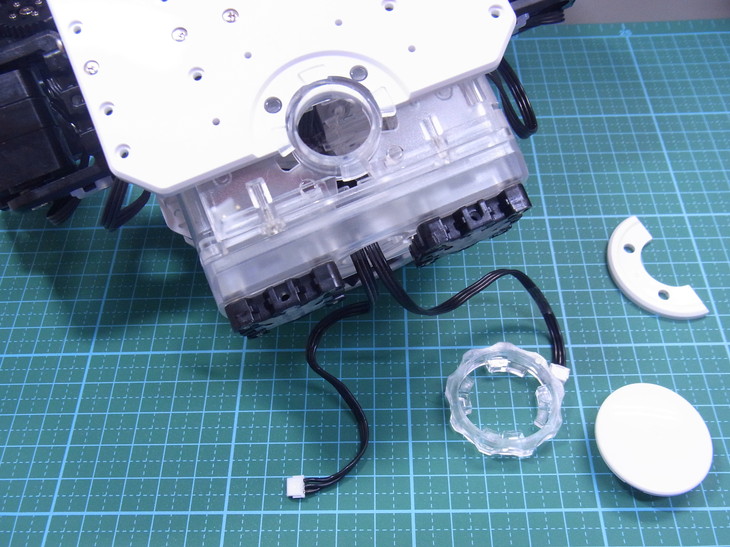
3)バックパック側のパネルスペーサーも外し、BTレッグプレートを外します。
4)BTレッグプレートのジョイントベースを外します。
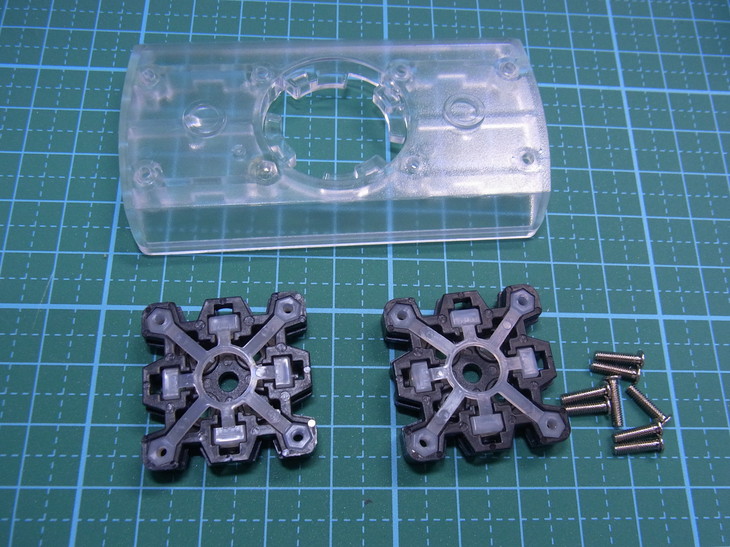
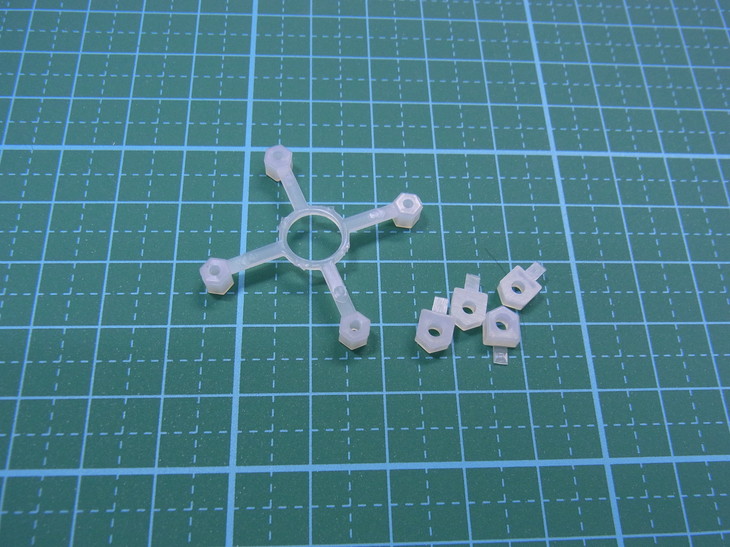
5)用意したジョイントナットのM2.6部をすべてカットし、ボトムスペーサー3300Aに取り付けます。
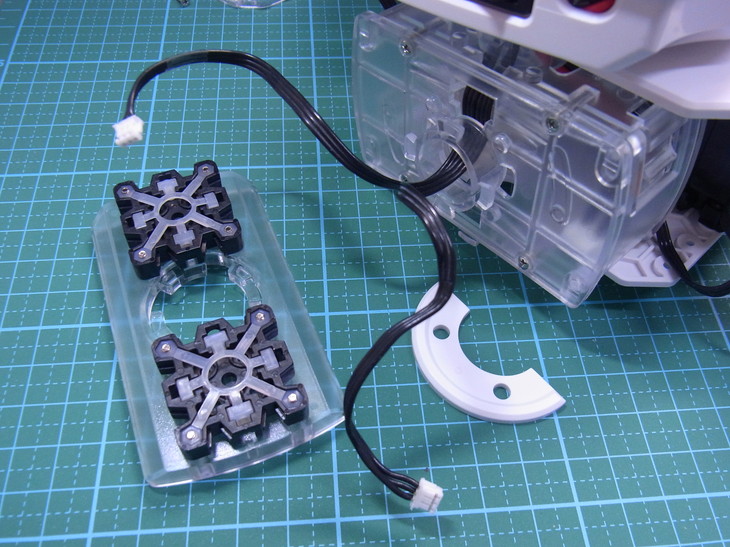
6)用意したサーボを2つともID11に、ICS通信速度を1250000bpsに設定してください。

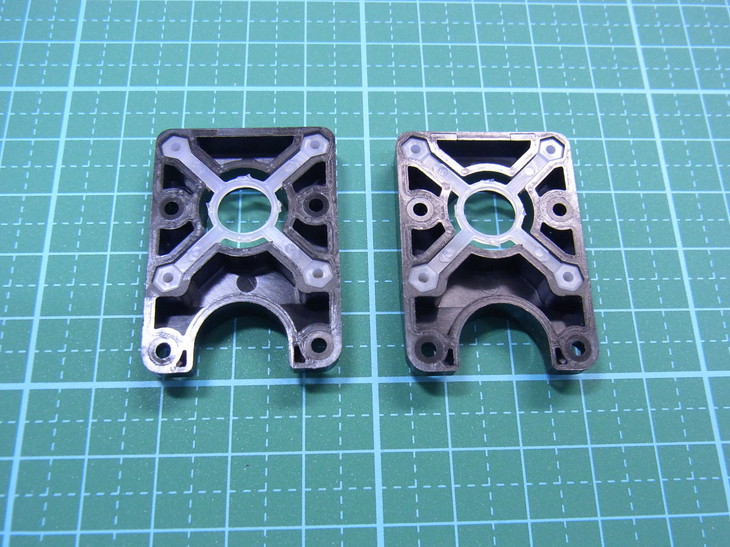
7)サーボのケースビスをすべて外します。
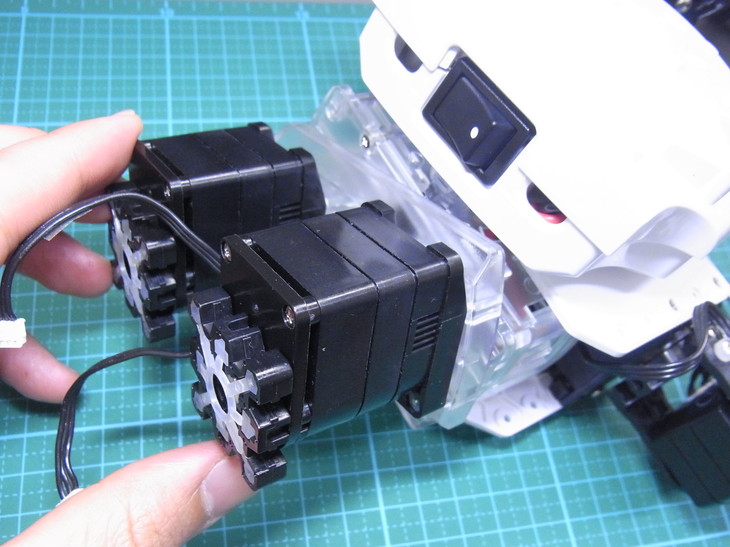
8)サーボのボトムケースにボトムスペーサー3300Aを7)で外したケースビスで固定します。
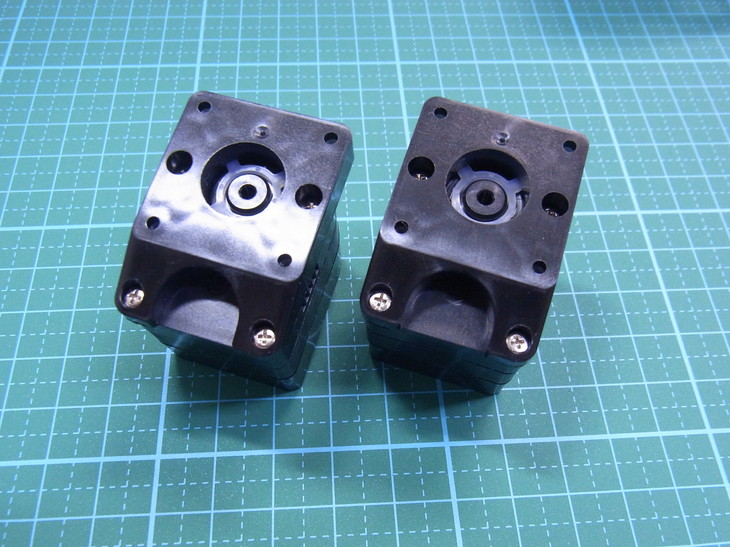
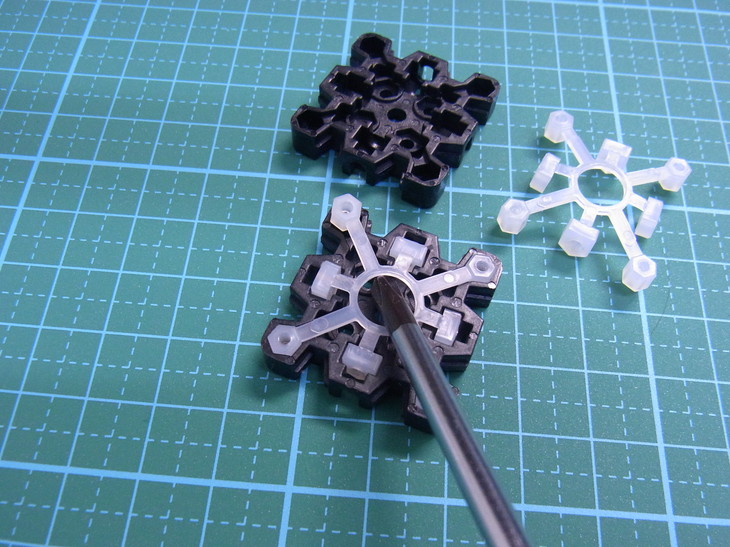
9)アームサポーター3300BにサポーターBスペーサーを四隅にのせます。サポーターBスペーサーは表裏があります。表側をアームサポーター向けにかぶせてください。

10)アームサポーター3300Bをサーボのトップケースに固定します。スペーサーが外れないように、机に置いたアームサポーターへサーボをかぶせるように装着すると簡単に固定できます。


11)小径ホーンをサーボの軸に取り付けます。軸のニュートラルとホーンのセンターが合わさるように取り付けてください。

12)4)でBTレッグプレートから外したジョイントベースからジョイントナットをはがします。
13)ジョイントベースを小径ホーンに固定します。固定にはM2-4を四隅に使用し、ホーン止めビスはM3-8を使用してください。


14)取り付けたジョイントベースに12)で取り外したジョイントナットを再び取り付けます。

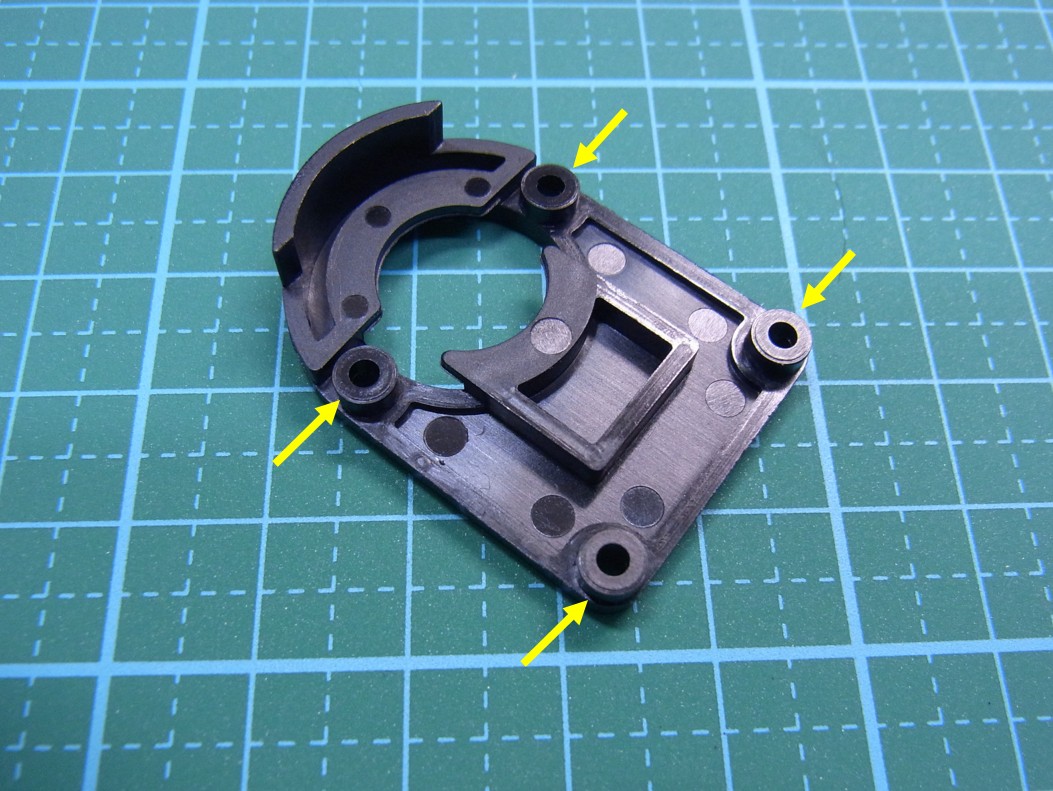
15)BTレッグプレートにボトムスペーサー側を固定します。


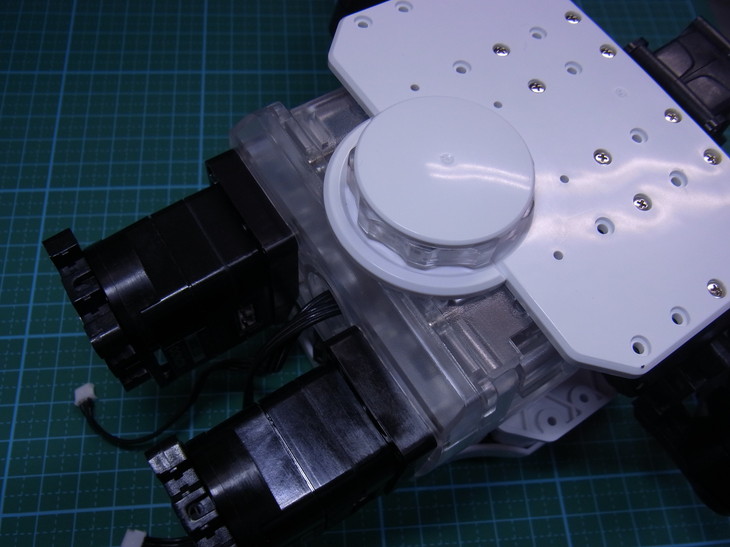
15)BTレッグプレートをボディーのBTボックスにつけ直します。取り付け向きに注意してください。

16)ボディーパネル、ロックリング、ロックリングキャップを取り付けます。バックパック側のボディーパネルも取り付けてください。
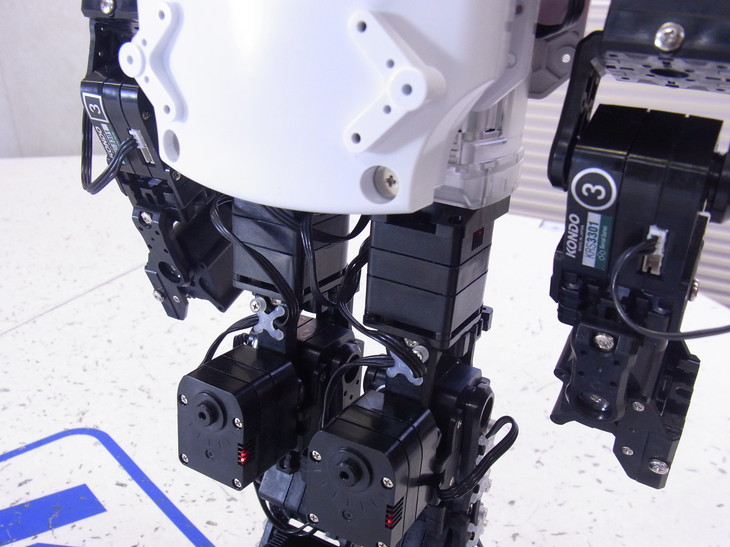
17)ジョイントベースに脚部を固定します。固定には外した時と同様にM2.6-10ビスを使用してください。
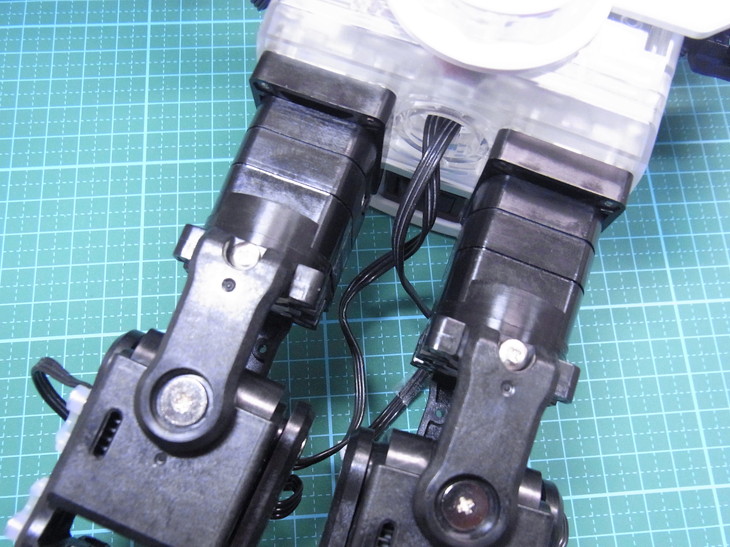
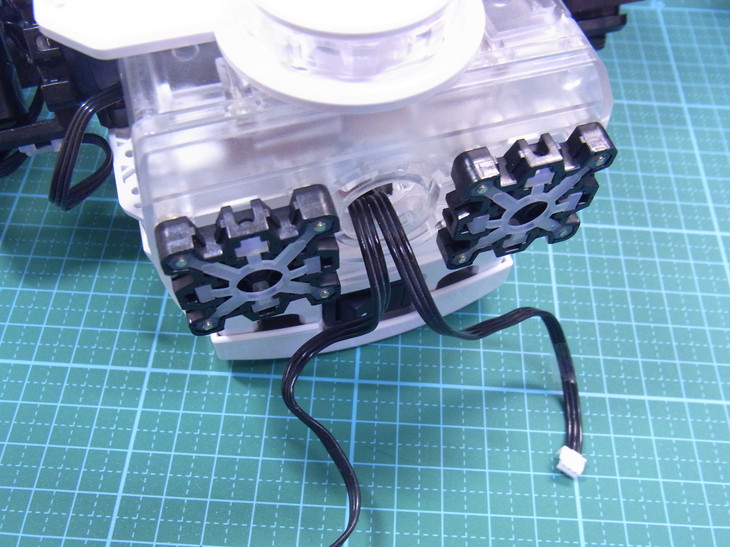
18)配線をします。BTボックスからのケーブルは、新規で取り付けた旋回軸のサーボに接続してください。旋回軸のサーボとID5のサーボは、用意したZH接続ケーブル2Aのケーブルで接続してください。

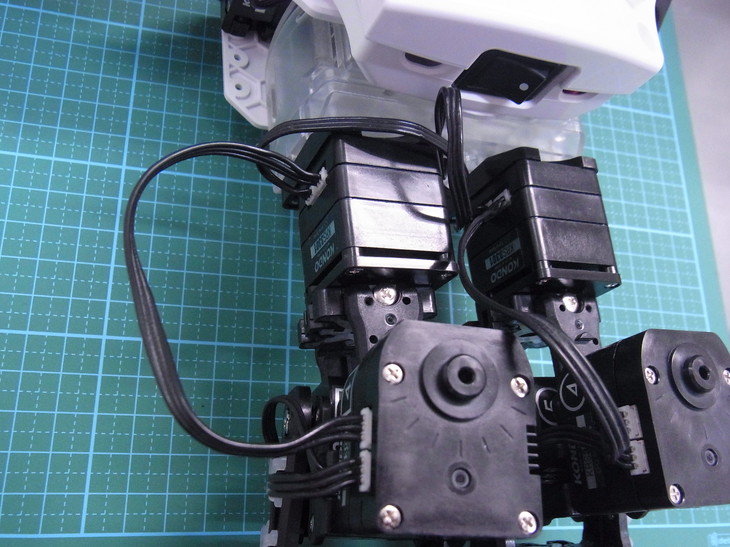
19)ケーブルガイドXでZH接続ケーブルをしてください。

以上で作業は完了です!
■動画
旋回軸を取り付けた状態のモーション作成例です。以下の動画をご覧ください。
■サンプルプロジェクト
旋回軸を追加した状態のサンプルプロジェクトを公開します。ダウンロードしてご利用ください。
![]() <ダウンロード>
<ダウンロード>
・「XL2-20DOF_xxx_ヨー軸旋回」モーションが旋回軸を使用した旋回モーションです。
・次回でご紹介する腕のヨー軸を追加した状態のプロジェクト設定になっています。
※2017.7.22 プロジェクトを修正しました。ICS通信速度は1250000bpsにて使用してください。115200bpsのまま使用すると誤動作しますので、必ず設定の変更をお願いします。
今回は旋回軸を追加しましたが、ここで課題が一つ発生しました。
脚部が長くなった分腕の長さが足りなくなったため起き上がりができません・・・
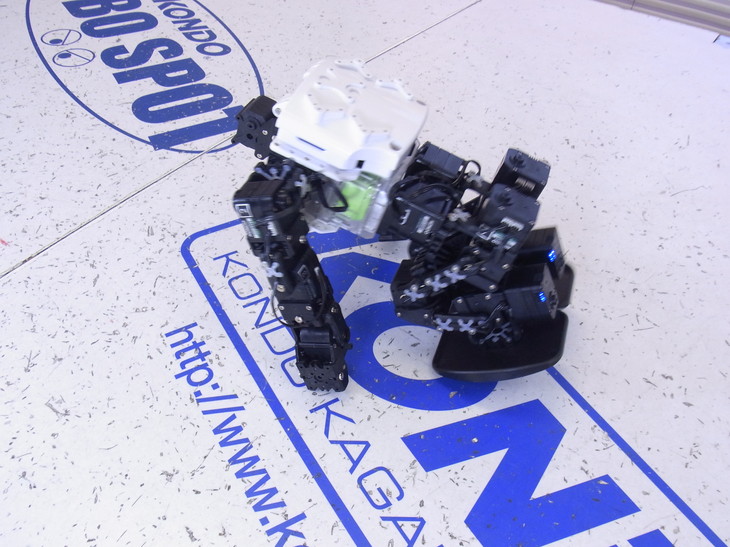
そこで、次回は腕部にも1軸ずつ追加して腕の延長と自由度の追加を行いたいと思います!
以上です!
<商品紹介>
KXRの改造には複数のビスを使用しますが、改造に合わせて買い足しを行うのは手間がかかります。そこで、KXRの組み立てに必要なビスをまとめたビスセットがお勧めです。ビスケース入りですので使い勝手もよく、故障やメンテナンスなどの対応にも役立ちます。
