
無線コントローラーを搭載する
KXRシリーズの各キットに受信機KRR-5FHを搭載することで、KRC-5FHを使用した無線コントロールができるようになります。今回は、KRR-5FHの搭載と設定についてご紹介します。
こちらの内容は、以下のPDFでもご覧いただけます。
■必要な製品

送信機と受信機がセットになっています。必要なケーブルもこちらに含まれていますので追加は必要ありません。

すでに送信機をお持ちの場合は、受信機KRR-5FHのみご用意ください。
※2017.3.27 3月27日出荷分より、ZH接続ケーブル2(60mm)が付属になりました。
■搭載方法
バックパック内の右側にKRR-5FHがちょうど収まる搭載スペースがあります。こちらにM2-6ビスで固定します。ビスは、KXRの組み立てで余ったビスを使用します。
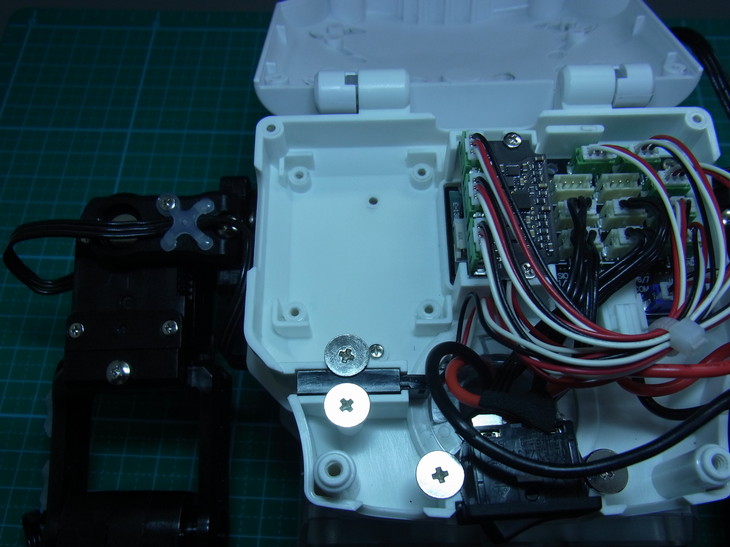
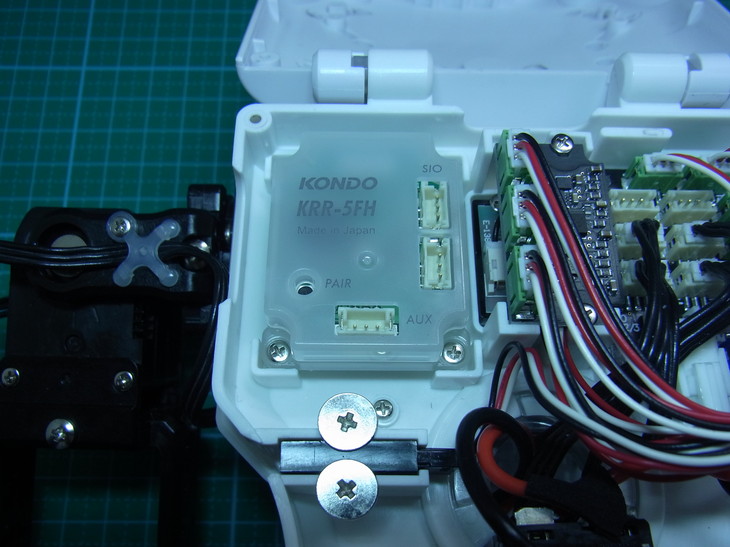
1)KRS-5FHを搭載スペースにM2-6で固定してください。4点固定します。
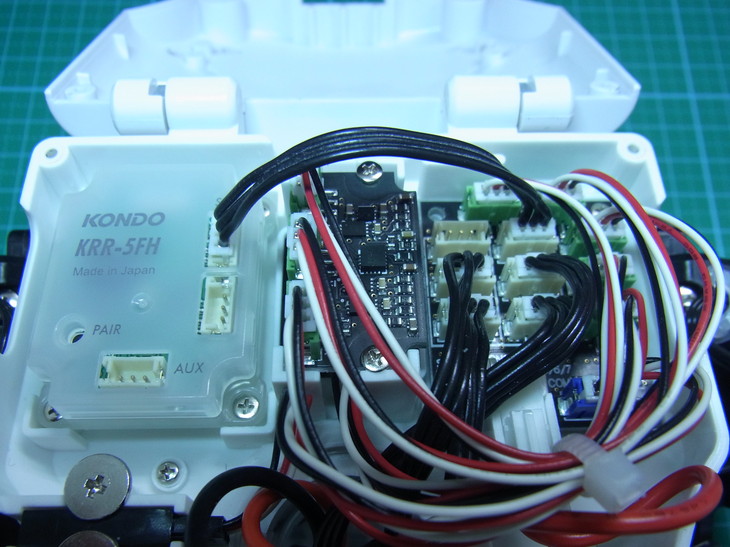
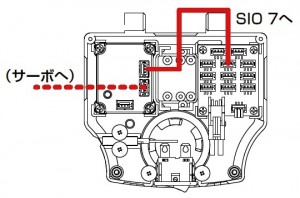
2)付属のZH接続ケーブル2(60mm)を配線します。KRR-5FHのSIO端子に片側を接続し、もう片方をRCB-4miniのSIO5,6,7で空いている端子に接続してください。
もし空いていない場合は、SIO5,6,7に接続しているケーブルをKRR-5FHのSIO端子に接続し、空いた端子にKRR-5FHのケーブルを接続してください。
以上です!たった2ステップの作業で搭載が完了しました!
次は、設定方法をご紹介します。設定にはHeartToHeart4を使用します。
●デイジーチェーン接続について
サーボや受信機などのICS機器は、各デバイスごとに個別のID番号が割り振られています。RCB-4miniから送られてくる角度情報などのコマンドは、このID番号を含めて構成されていますので、各デバイス同士が接続されていても自分のID番号以外の指令には対応しません。そのため、デバイス同士を接続する方法が可能になります。この方法をデイジーチェーン(マルチドロップ)接続と呼びます。

■ペアリング
送信機KRC-5FHと受信機KRR-5FHを通信できる状態にするために、ペアリングをします。
ペアリングとは、送信機と受信機を対にする作業です。

■設定方法
※サンプルプロジェクトは、予めボタンデータが登録されていますので、プロジェクトを書き込むだけで無線コントロールが可能です。以下の解説は、ボタンデータを変更したい場合や新規でプロジェクトを作成した場合にご利用ください。
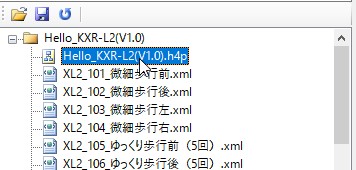
1)HeartoHeart4を起動し、ロボットに対応したサンプルプロジェクトを展開します。展開するためには、プロジェクトブラウザウィンドウのフォルダ内にある.h4pのファイルをダブルクリックします。
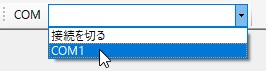
2)COMポートの番号も指定してください。
※COM番号はご利用のPCによって異なります。詳細はKO Driver付属のマニュアルをご参照ください。
3)Syncをアクティブにします。

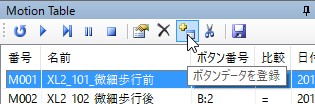
4)モーション一覧ウィンドウを開きます。

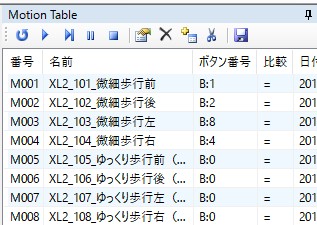
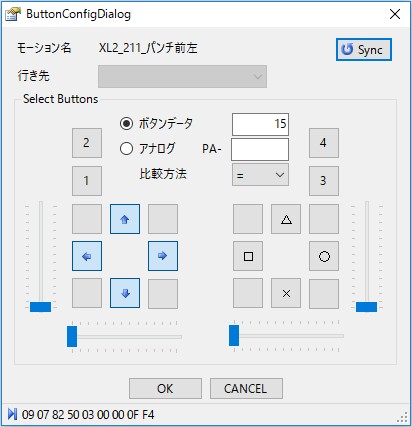
5)ボタンを登録したいモーションをダブルクリックすると、ButtonConfigDialogが開きます。ウィンドウ内には無線コントローラーと同じボタン配置で各ボタンが並んでいます。このボタンをクリックしてアクティブにすると、それがそのまま無線操縦するときのボタンになります。
ボタンを組み合わせることも可能です。例えばS1(シフト1)を押したまま↑を押すこともできます。
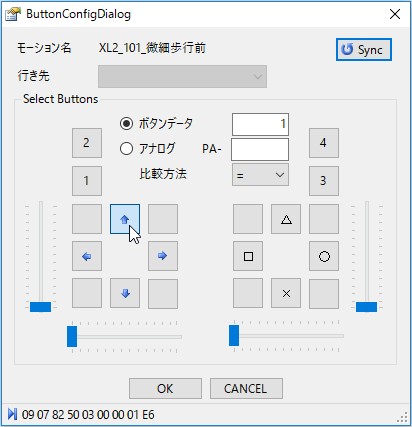
6)ボタンの選択が完了したらOKボタンで閉じます。
これをボタン登録したいモーションへ繰り返してください。
※登録をなくしたい場合は、すべてのボタンが押されていない状態でOKを押すと登録が外れます。
7)各モーション設定がすべて完了したらモーション一覧ウィンドウの上部にある「ボタンデータを登録」ボタンでロボットに登録します。
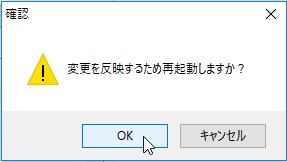
8)登録完了後に再起動を確認するダイアログが開きますので、OKでロボットを再起動してください。
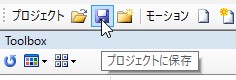
9)最後にプロジェクトを保存して作業は完了です。
●スペシャルボタンについて
KRC-5FH本体の中央部(画像の赤枠内)にスペシャルボタンを用意しています。

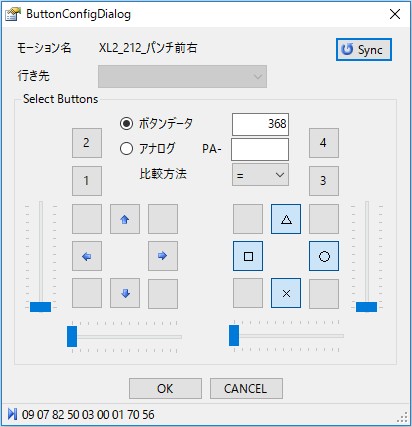
このボタンは、ボタン登録の際に片側すべてのボタンを押した状態に割り当てると各スペシャルボタンに対応します。
他のボタンより大きくわかりやすいので、左右のパンチやシュート、投げ技など突発的に押すときに大変便利です。
【左のスペシャルボタンに対する登録】
【右のスペシャルボタンに対する登録】
●KRC-5FH / KRR-5FHマネージャーソフト
マネージャーソフトを使用することでKRR-5の通信速度や、KRC-5FHのスペシャルボタンの割り当てを変更できます。以下よりダウンロードしてご利用ください。
■サポート情報『KRC-5FH / KRR-5FH マネージャーソフト』
サンプルモーションから、操作しやすいボタン配置にすることで無線コントロールが楽になります。また、新しいモーションを作成した際にも、この方法でボタンを割り当てることが可能です。
簡単に登録できますのでぜひお試しください。
以上です!