カメ型
サーボをハイトルクに交換する

KXRシリーズはメインサーボにKRS-3301を採用していますが、このサーボは高トルクのKRS-3304とケースが同寸法ですのでそのまま交換することが可能です。今回は、KXR-L2 ヒューマノイド型のキットを使用してサーボの交換方法をご紹介します。
■KRS-3304 ICS
■交換方法
■比較動画
距離センサーを搭載する

KXRのセットには、PSD距離センサーや超音波センサー(受信部)を搭載するためのセンサーベースが付属しています。今回は、このセンサーベースの使用方法をご紹介します。
■PSDセンサーとは
■必要なパーツ
■搭載方法
■HeartToHeart4でセンサーを制御する
■プログラムの実行
■プロジェクト、モーションを保存する
無線コントローラーを搭載する

KXRシリーズの各キットに受信機KRR-5FHを搭載することで、KRC-5FHを使用した無線コントロールができるようになります。今回は、KRR-5FHの搭載と設定についてご紹介します。
■必要な製品
■搭載方法
■設定方法
組立ポイント セレーションとニュートラル

今回の組立ポイントは、サーボのセレーションとニュートラルについてご紹介します。組みあがったロボットが正常に動作するためは、サーボとパーツが正しく接続されている必要があります。非常に重要なポイントですのでぜひご一読ください!
■ニュートラルとは
■セレーションへのパーツの取り付け
■組み立て途中でニュートラルがずれてしまったら

組立ポイント ジョイントベース
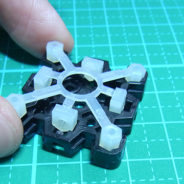
今回から、数回に分けてKXRの組み立てのポイントをご紹介します。
初回は、ジョイントベースとナットです!
ヒューマノイド型のみならずカメ型など他のキットも同じパーツを使用していますので、ぜひ参考にしてください。
■ジョイントベースにナットを取り付ける
■M2.6ナット部を切る場合
■M2ナット部を切る場合