
KXR-L6の足先を変更する
今回はKXR-L6 6脚型ロボットの足先を変更し、より安定した歩行ができるように改造する方法をご紹介します。
■必要なパーツ
アドバンスセットA(またはB)の余ったパーツのほかに、追加で単品販売のパーツを用意します。
()内の数字は追加で用意するパーツの数です。
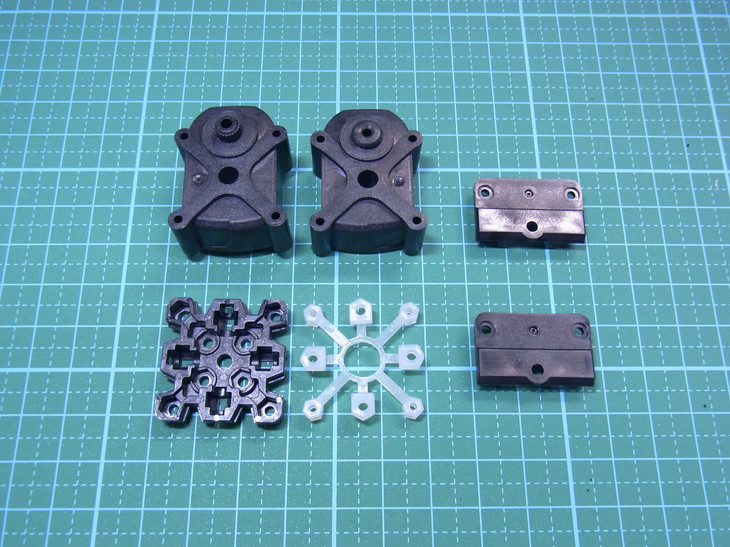
※画像は1セット分のパーツです。
・ビス類
■搭載方法
下記の作業は、6脚すべて同じ作業です。
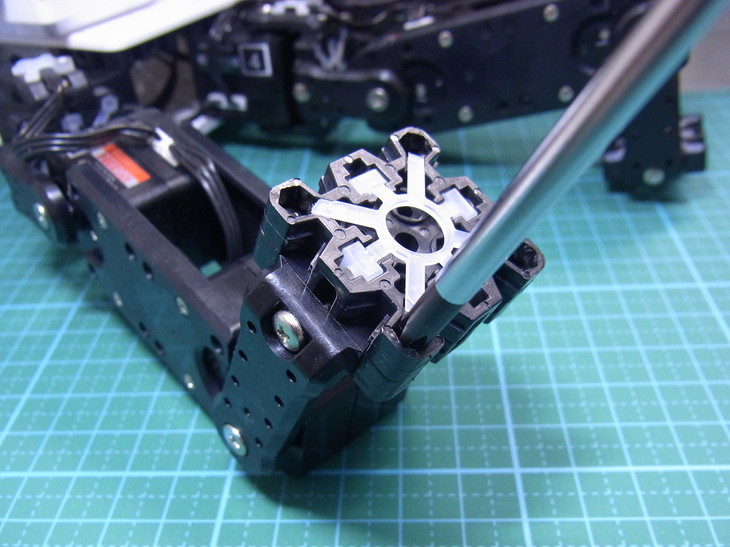
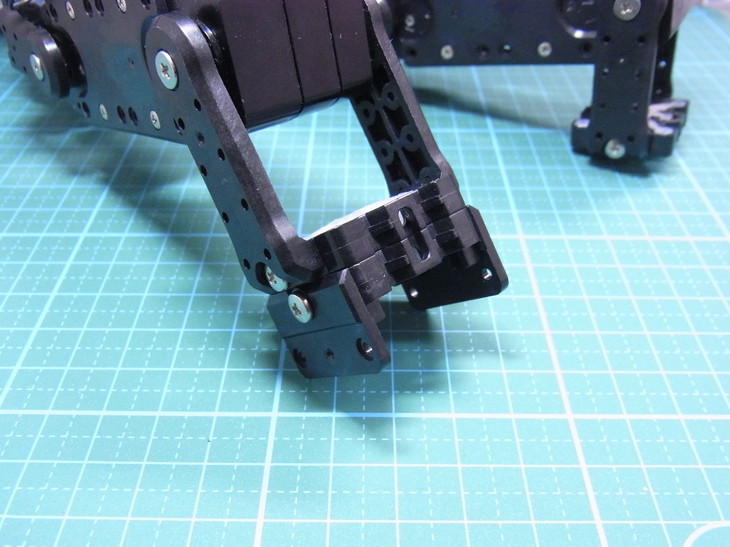
1)KXR-L6の足先についているサーボアーム3300A(38mm)を取り外します。


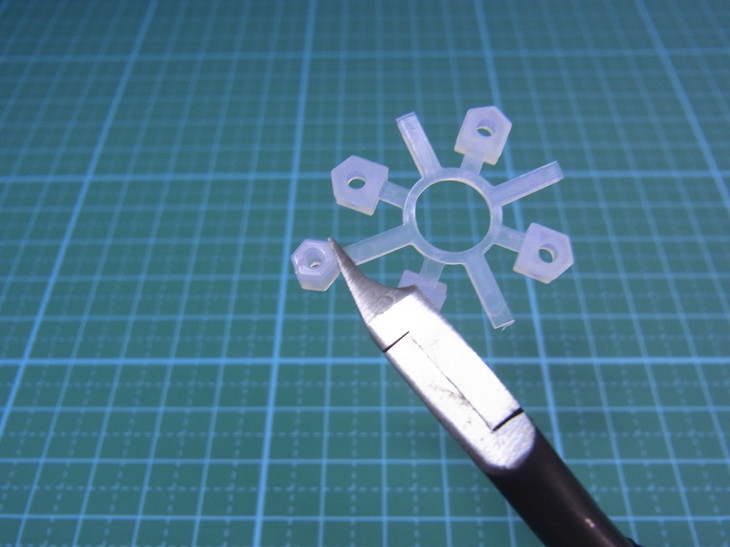
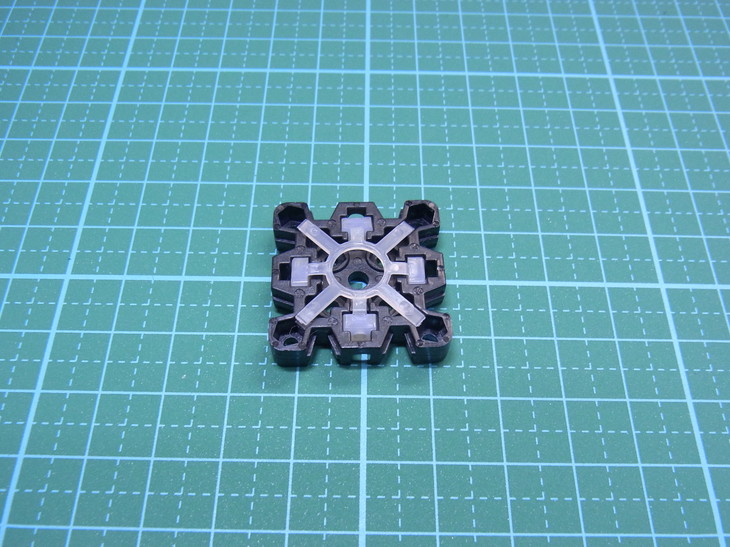
2)ジョイントナットのM2部をすべてカットし、ジョイントベースに取り付けます。
3)2)で組み立てたジョイントベースをM2-8ビスで足先に固定します。
4)ジョイントフレームをM2.6-10ビスで固定します。
5)ダミーサーボを組み合わせM2-6ビスで固定します。

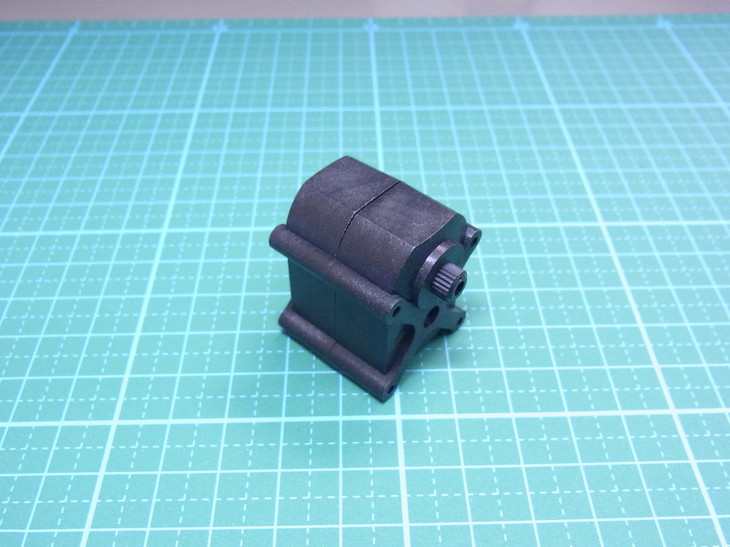
6)5)で作成したダミーサーボをM2-6ビスで足先に固定します。
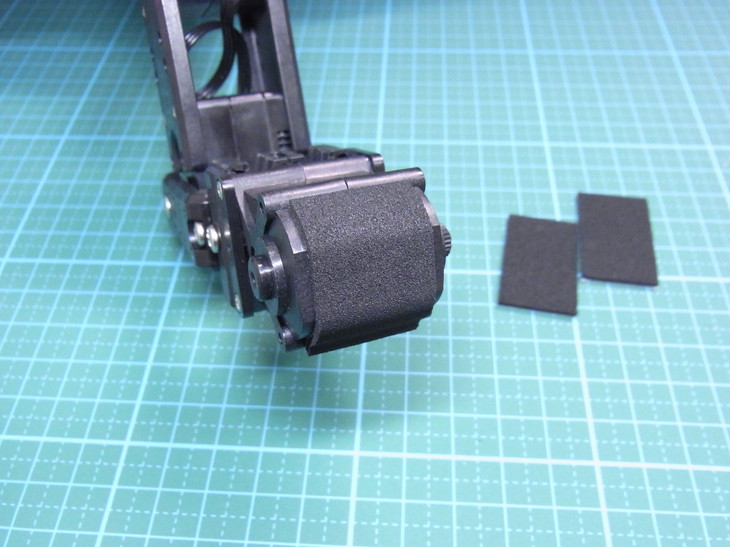
7)このままでも歩けますが、グリップをよくするためにグリップシートを貼り付けます。幅20mmでカットします。
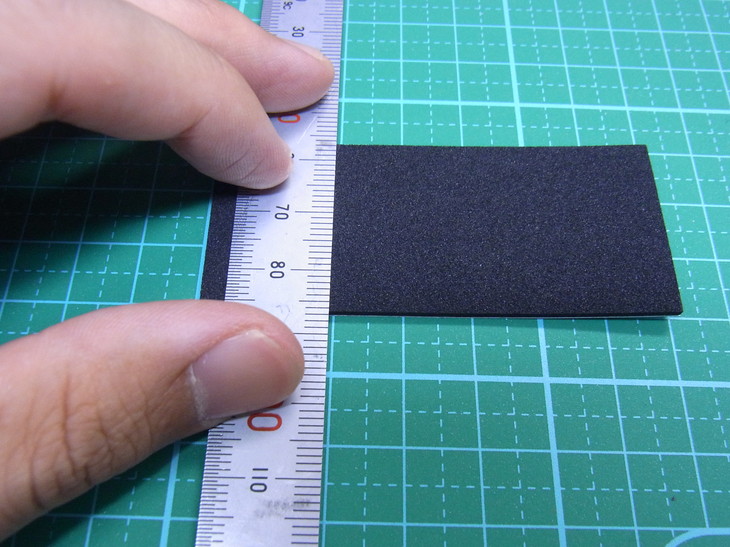
8)ダミーサーボに貼り付けて作業は完了です!
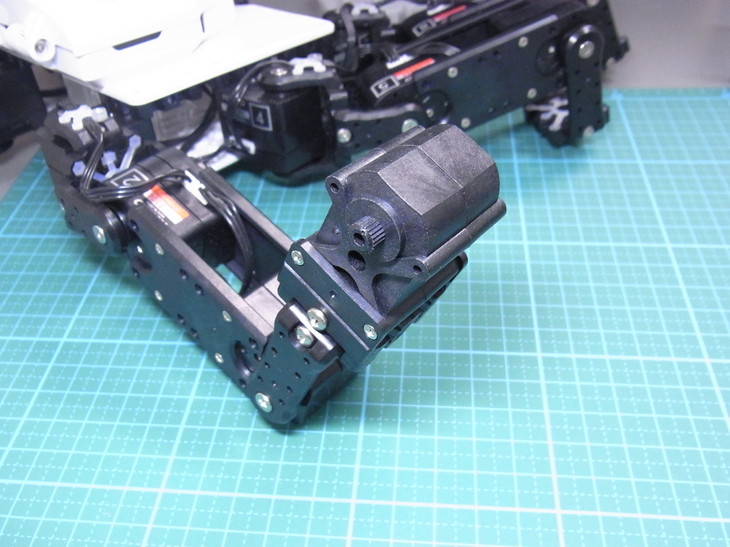
完成するとこのようになります。
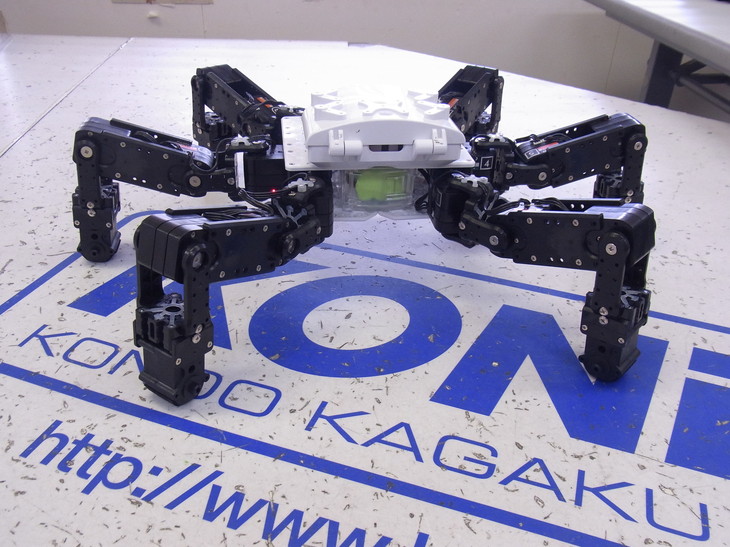
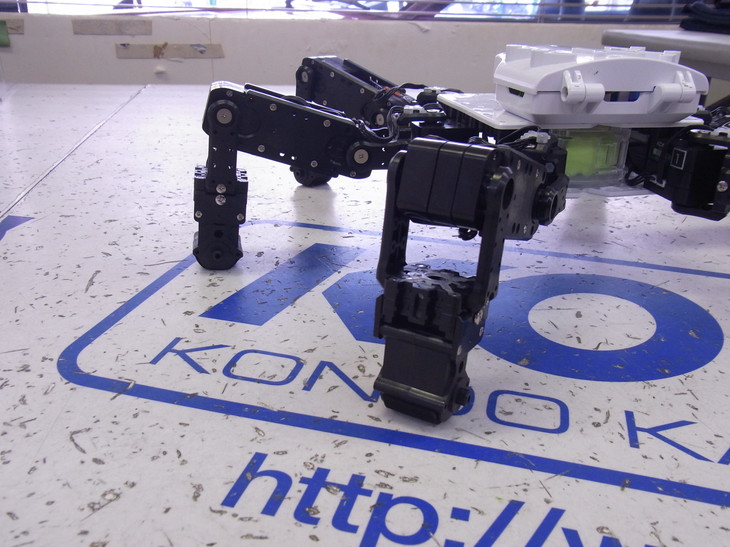
接地面が増えてより安定するようになりました。足の長さはほとんど変わりませんのでサンプルモーションをそのまま使用することができます。
作業時間は約1時間ほどで簡単にできました!
■動画
この動画のモーションは、V1.3のプロジェクト内にある「中姿勢歩行」をご利用ください。
以上です!ぜひお試しください!