PMXシリーズサーボモーターを使用したSUSTAINA-OP2™の紹介
ロボカップで何度も優勝経験がある CIT Brains (千葉工業大学)。こちらのチームが開発した自律型ヒューマノイドロボット「SUSTAINA-OP2™」にはPMXシリーズサーボモータをご採用いただいています。こちらの記事は、CIT Brains の一員である千葉工業大学 未来ロボティクス専攻の久保寺さんに執筆していただきました。「SUSTAINA-OP2™」について詳しく解説します。
SUSTAINA-OP™シリーズの概要
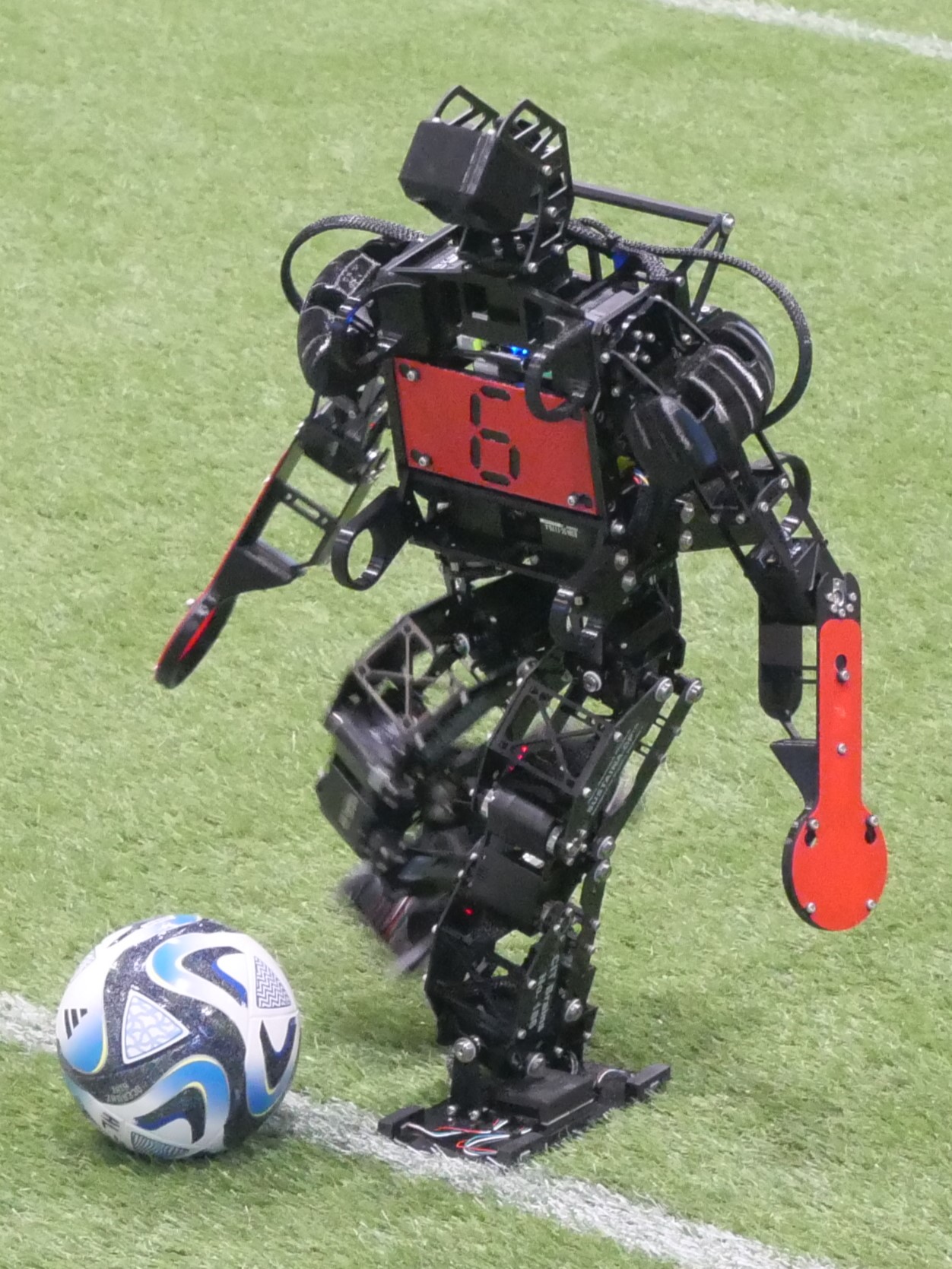
SUSTAINA-OP™シリーズは、ロボカップ ヒューマノイドリーグに出場するために設計・開発された自律型ヒューマノイドロボットです。ロボカップは、人が遠隔操作するのではなく、ロボットが自分で考えて動く自律移動型ロボットによる競技会です。今回紹介する「SUSTAINA-OP2™」は、ロボカップ2024 オランダ 世界大会でヒューマノイドリーグ キッドサイズ部門の優勝を果たしました。
ロボカップ2024 オランダ 世界大会 ヒューマノイドリーグ キッドサイズ 決勝
このロボットは、機械設計や電気設計のデータがGitHubで公開されており、誰でもアクセスして見ることができます。前モデルの「SUSTAINA-OP™」はB3Mシリーズサーボモータを使用していましたが、SUSTAINA-OP2™では新しくPMXシリーズサーボモータが採用されています。
●SUSTAINA-OP2™ GitHub公開データ

SUSTAINA-OP™(B3Mシリーズを採用,左),SUSTAINA-OP2™(PMXシリーズを採用,右)
SUSTAINA-OP2™の設計と機能
SUSTAINA-OP2™は、ロボカップヒューマノイドリーグに向けた研究・競技活動の中で開発されたプラットフォームロボットです。自作・外注可能な子供サイズのヒューマノイドロボットであり、高さ75cm、重量5.5kg(バッテリー込み)で、全21個のPMXサーボモータが使用されています。
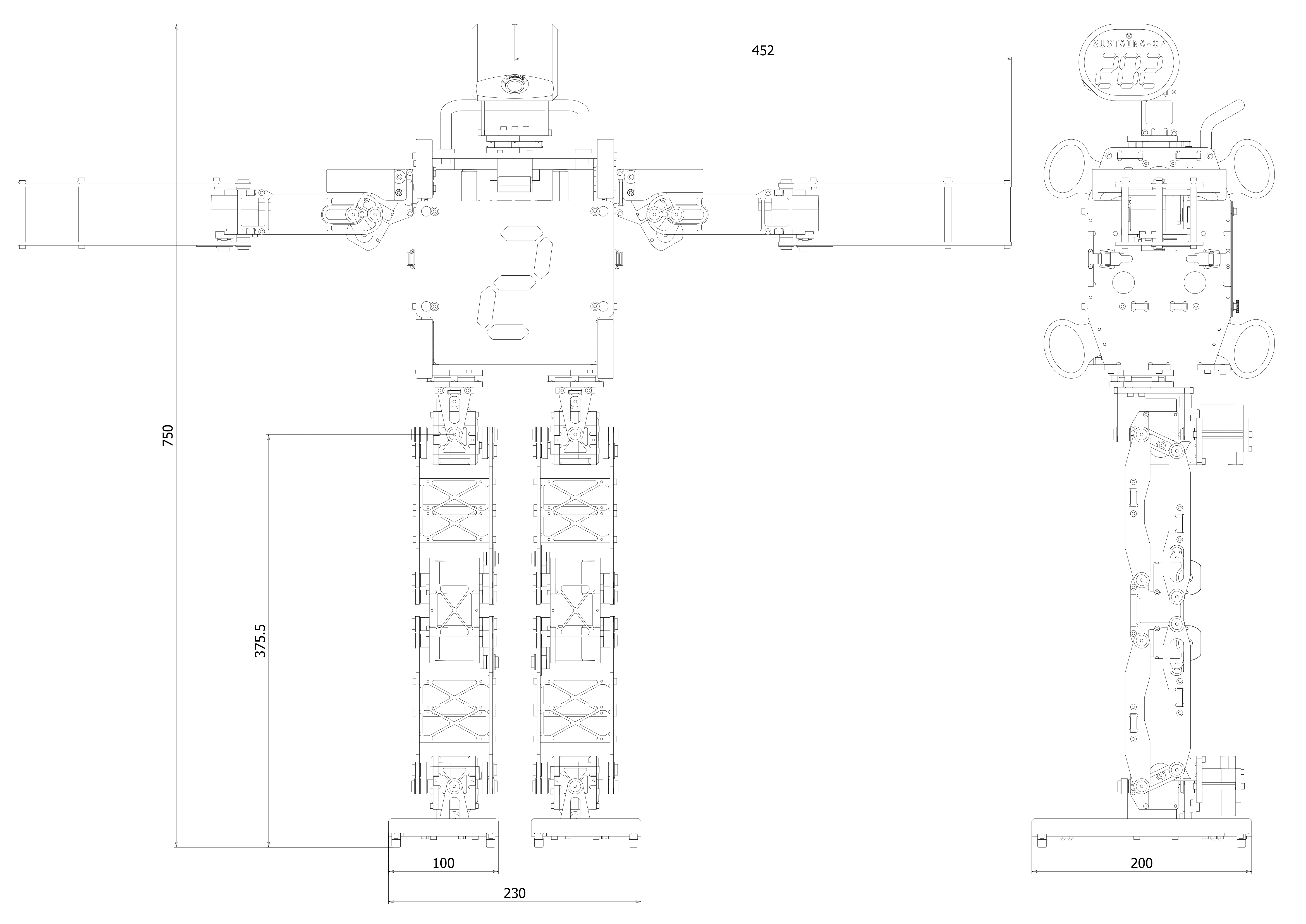
SUSTAINA-OP2™の外寸法
SUSTAINA-OP2™の機械部品は、小型CNCフライスでの加工または外注サービス(例: meviy)に対応しています。また、電気基板はPCBA(Printed Circuit Board Assembly)として入手可能で、製作の難易度が大幅に下がっています。
機械的構造
このロボットでは、サーボモータにかかる負荷を減らすために、可動域の広い四肢と頭部にはクロスローラベアリングを使用し、その他の関節には滑り軸受を用いた揺動型スライダクランク機構による減速機構を採用しています。この構造により、ロボットの外形を崩すことなく、サーボモータ本体をロボットから取り外すことが可能です。
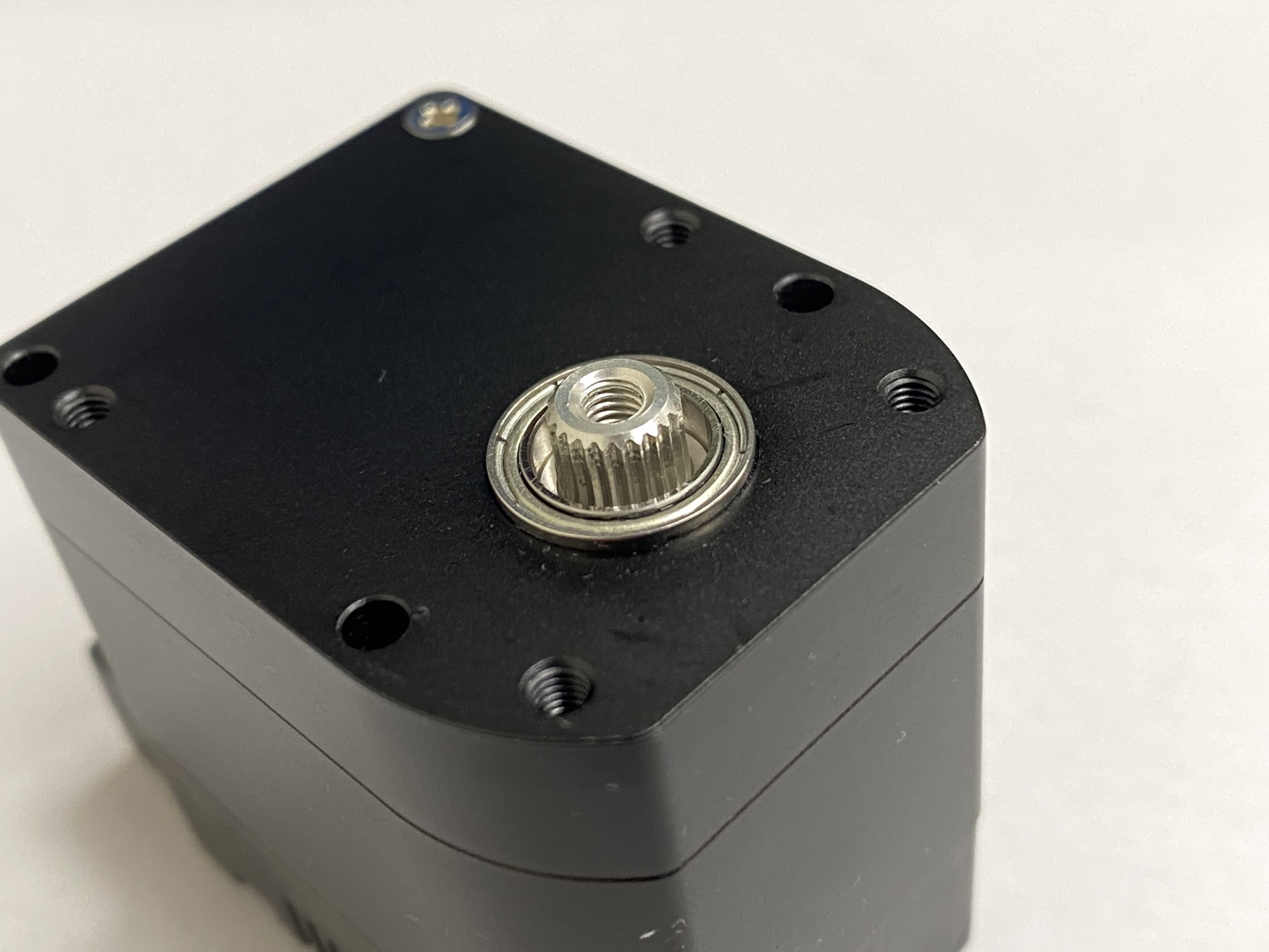
PMXサーボモータは、高強度のアルミケースが採用されており、この堅牢なケース構造のおかげで、すべての箇所でフレームの凹部にモータを嵌め込み、ネジ2本でしっかりと固定することができます。この設計により、位置決めが容易になり、さらにトップケースがサーボモータの回転方向の負荷を受け止めるようになっています。
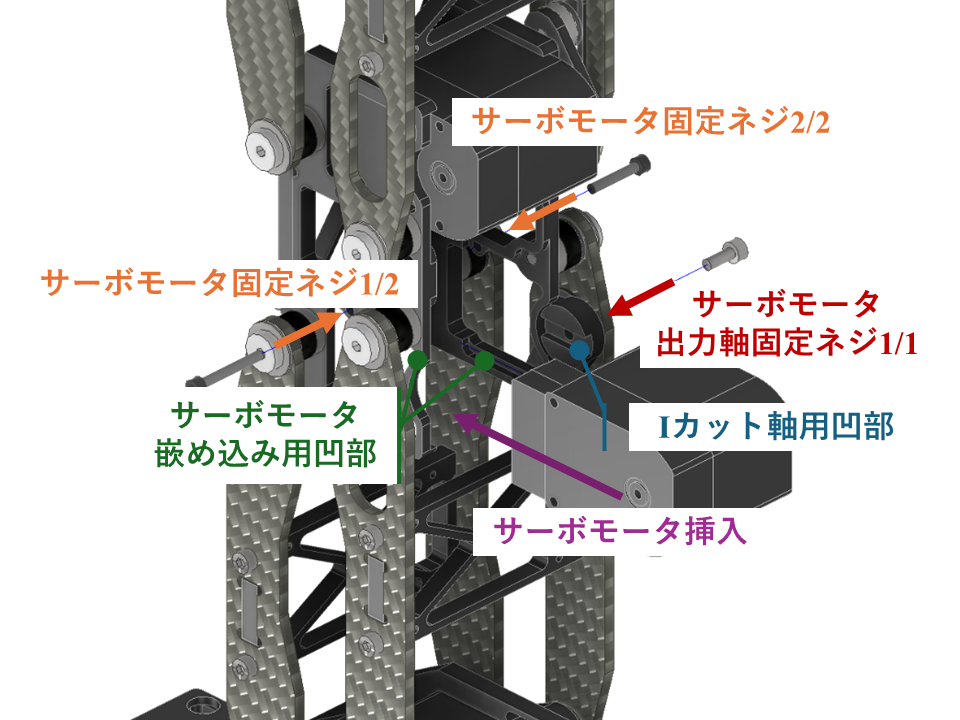
ロボット本体へのPMXサーボモータの固定

自律的な動作
SUSTAINA-OP2™は、ロボカップヒューマノイドリーグにおいて自律的にサッカーを行うための要素が揃っています。ロボットにはカメラとコンピューターボードが搭載されており、自律的にボールを認識し、ゴールやフィールドの白線などを基に位置を推定し、ゴールまでボールを運ぶ戦略を考えます。バッテリー(LIPO 3S1P 3,250mAh)を搭載することで、最大20分の連続動作が可能です。
コンポーネントとシステム構成
ロボットの主要なコンポーネントは、コンピューターボード (Jetson Orin Nano Developer Kit)、頭部に取り付けられたカメラ、胴体に搭載された慣性計測装置(IMU)、そしてPMXシリーズサーボモータがあります。センサーから得られるデータに基づき、コンピューターボードがサーボモータを制御します。身体制御は約100Hzの速度で行われています。
PMXサーボの「制御モード」は位置制御のみ、「応答データ指定」は全て受け取る設定にしました。応答データ指定は、サーボの角度を指定するMotorWRITEコマンドの返事パケットにサーボの状態を付与する種類を設定できます。応答データは常に記録しており、後に他の情報と組み合わせて、ロボットの状態を把握したり調整に活用しています。
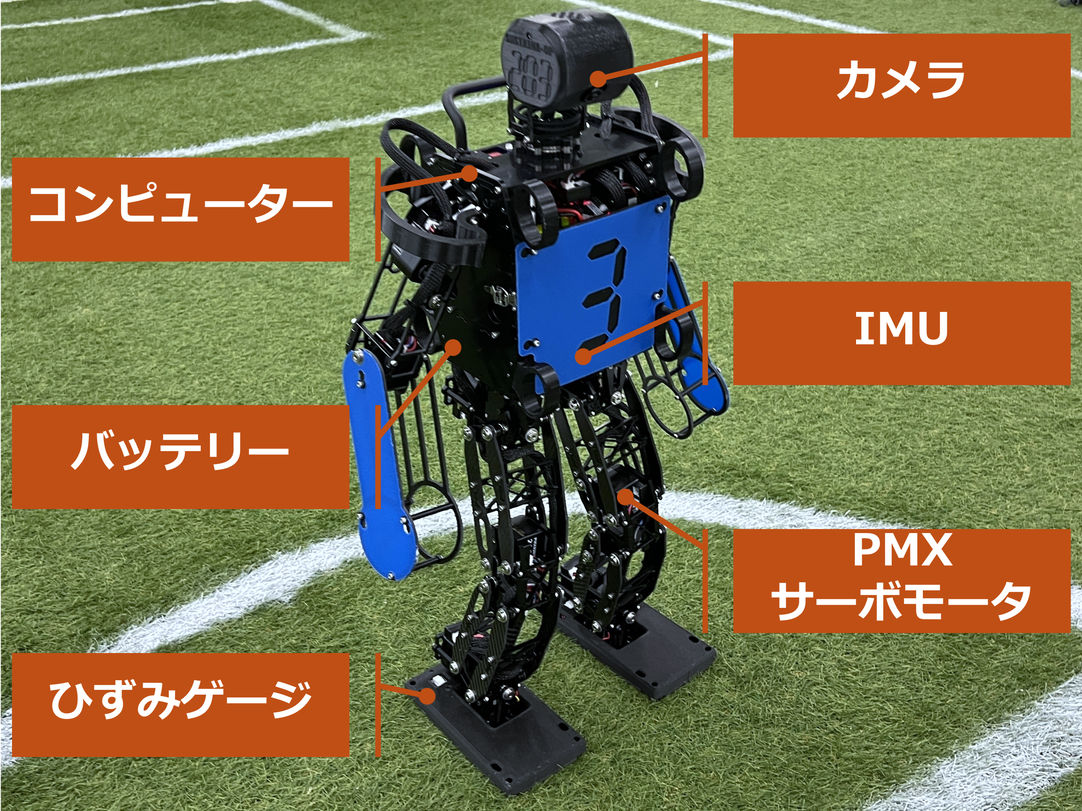
主要コンポーネント
サーボモータの構成
SUSTAINA-OP2™には、脚部各7個、腕各3個、頭部1個の計21個のPMXシリーズサーボモーター(PMX-SCR-5203HV ×10,PMX-SCR-5204HV ×1,PMX-SCR-9203HV ×8,PMX-SCR-9204HV ×2)が搭載されています。
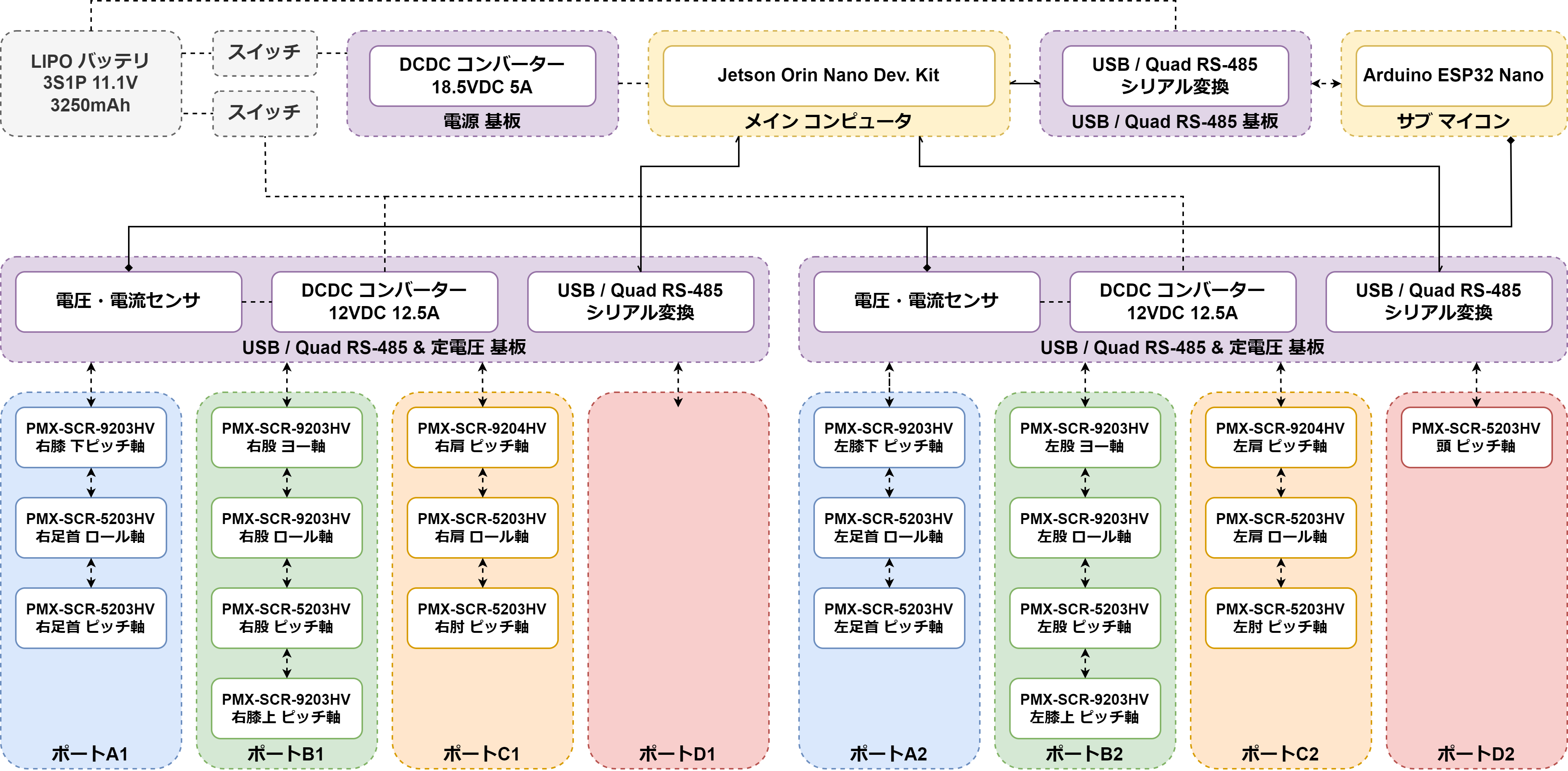
コンピュータボードとPMXシリーズサーボモータの接続
電力供給
電力供給は、ロボットの左右に分けて2つの系統で行われています。バッテリーからの電力は、DC-DCコンバータ(TDK I7C4W012A050V-0C1-R)を通じて12.0Vが安定して供給されます。これにより、競技中にバッテリーの電圧が下がっても、ロボットのパフォーマンスが低下するのを防ぎます。
通信制御
通信制御は、左右半身でそれぞれRS485 USB/シリアル変換アダプター(FTDI FT4232H + Texas Instruments SN65HVD75)を用いて行われます。全身のサーボモーターは7系統に分割され、各系統で1~4個のサーボモーターをデイジーチェーン接続することで、制御周期内に安定した通信と制御が可能です。
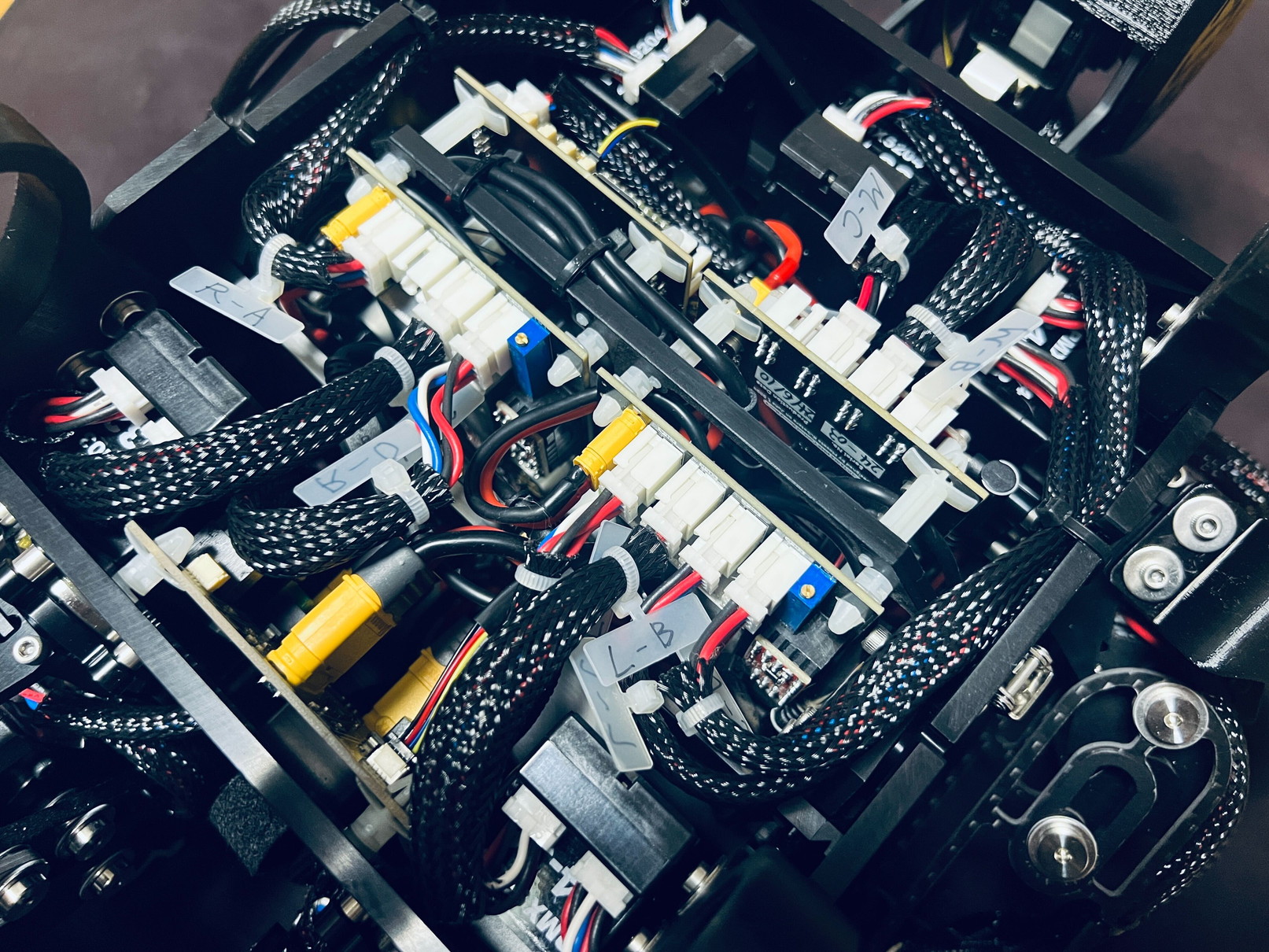
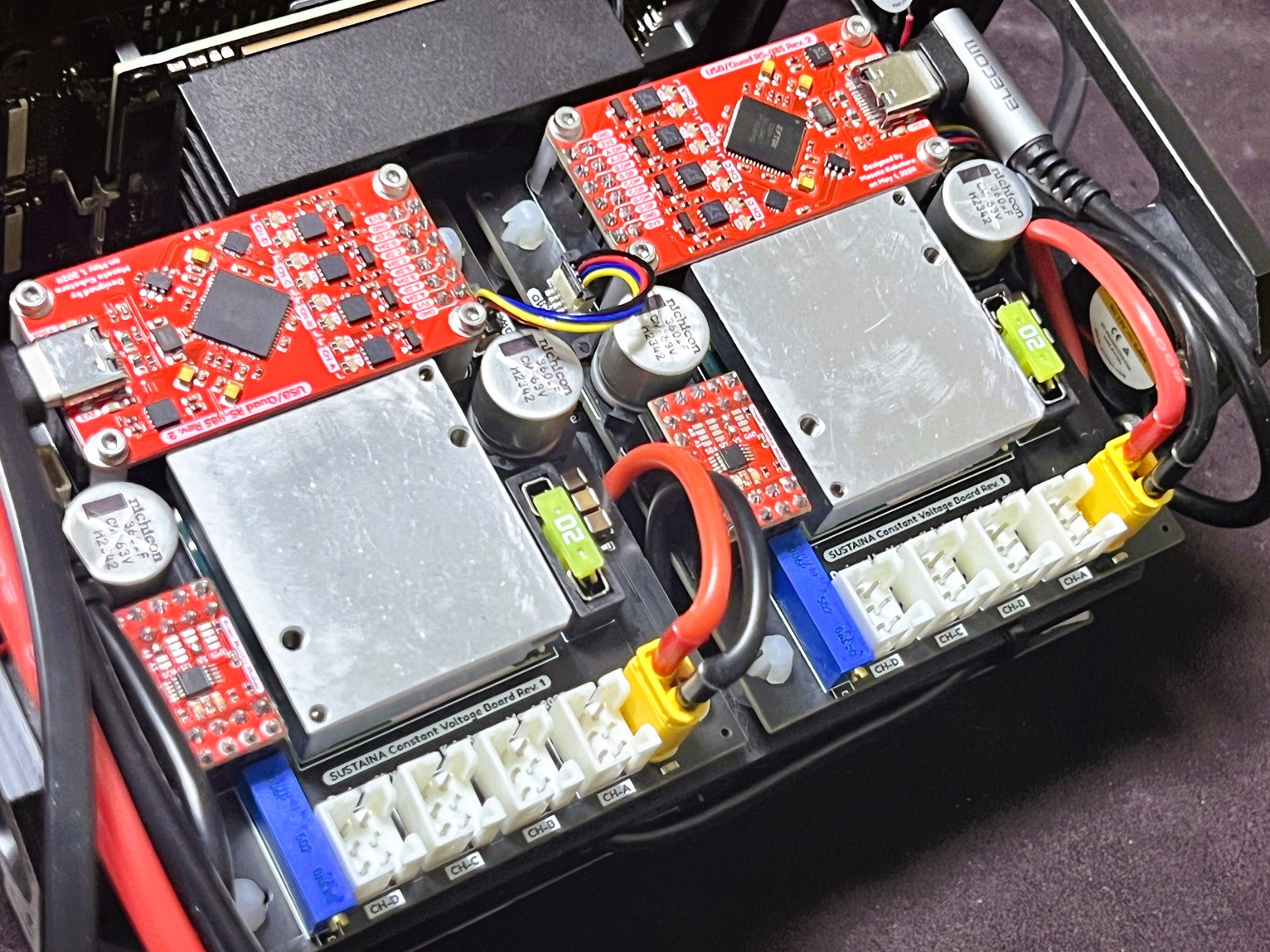
コンピューターボードとPMXサーボモーターを仲介する基板
PMXシリーズサーボモーターを採用したメリット
1.Iカット型出力軸の採用
PMXシリーズのサーボモーターには、Iカット型出力軸が採用されています。これは、従来のB3Mシリーズに比べて、長期間使用しても出力軸がガタつかないという特徴があります。これにより、ネジのゆるみなどのメンテナンスが不要になり、メンテナンスの手間が大幅に減ります。また、Iカット溝を利用することで、1本のネジのみでフレームを簡単に取り付けることができ、作業がより簡単になります。
B3Mシリーズ(SUSTAINA-OP™で採用、左)、PMXシリーズ(SUSTAINA-OP2™で採用、右)
2.高トルク・高速サーボのラインアップ
PMXシリーズサーボモーターは、B3Mシリーズと同サイズながら、瞬間最大トルクと無負荷回転数が向上しています。また、PMXシリーズではギヤ比が低く、高スピードなサーボもラインアップされています。これにより、回転数を保ちながらサーボモーターに外付けの減速機構を採用する選択肢が広がり、SUSTAINA-OP2™では、四肢と頭部を除く全16関節に揺動型スライダクランク機構による減速機構(長穴減速)を採用しています。
長穴減速の採用により、サーボモーターに直接的な衝撃を与えることを防ぎ、バックラッシュの軽減が期待されています。
| B3Mシリーズ | トルク | スピード | PMXシリーズ | トルク | スピード |
| B3M-SB-1040-A | 4.1[Nm] | 45[rpm] | |||
| B3M-SC-1040-A | 4.6[Nm] | 54[rpm] | PMX-SCR-5204HV | 6.18[Nm] | 64[rpm] |
| PMX-SCR-5203HV | 4.08[Nm] | 95[rpm] | |||
| B3M-SC-1170-A | 7.6[Nm] | 46[rpm] | PMX-SCR-9204HV | 9.74[Nm] | 47[rpm] |
| PMX-SCR-9203HV | 8.07[Nm] | 71[rpm] |
執筆: SUSTAINA-OP™シリーズ 製作 CIT Brains / 千葉工業大学 未来ロボティクス専攻 久保寺 真仁
SUSTAINA-OP™ © Masato Kubotera (2022) CC BY-NC-SA 4.0 DEED
SUSTAINA-OP2™ © Masato Kubotera (2024) CC BY-NC-SA 4.0 DEED