
KXR-L2に腕ヨー軸を追加する
今回は、前回の記事で旋回軸を追加したロボットに、腕の延長も含めまして腕ヨー軸を追加する方法をご紹介します。
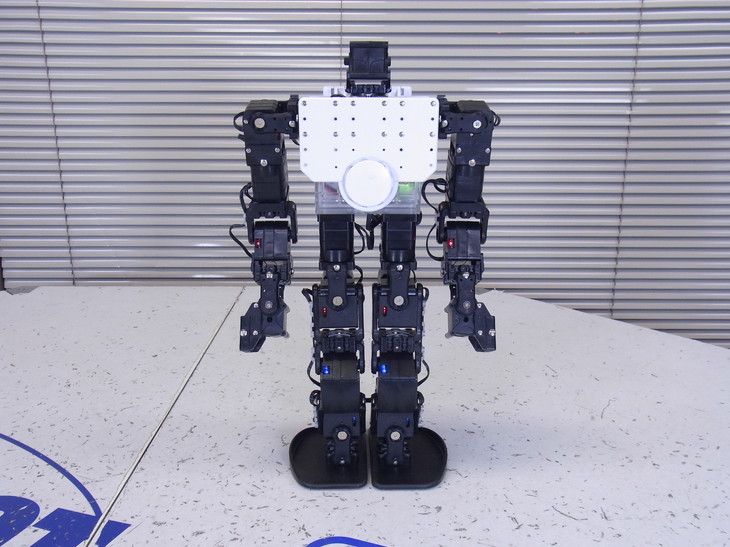
こちらの改造で合計20軸のヒューマノイド型が完成します。多彩な動きが可能になりますのでぜひお試しください!
※サーボの追加によりニッケル水素タイプのバッテリで動作できない場合があります。この記事の最後に解説がありますので、改造の前に最後までご一読ください。
■必要なパーツ
必要なパーツは前回と同じです。
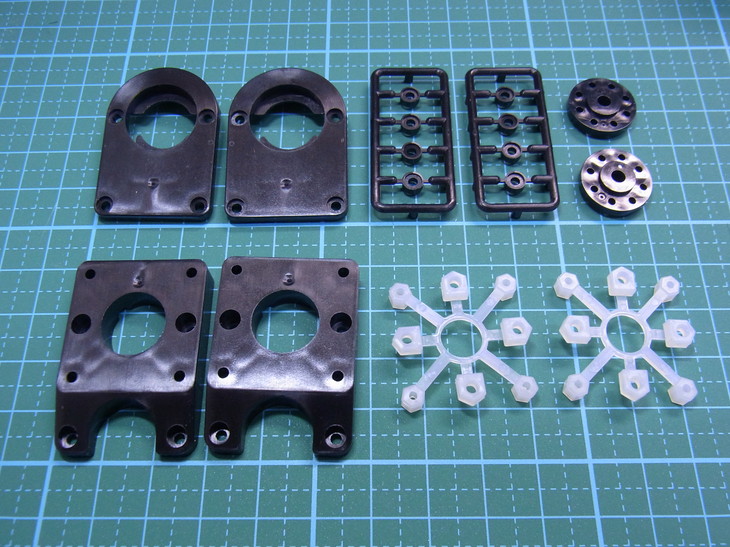
・KRS-3301 ICS ×2
(KRS-3304 ICSでも可)
・アームサポーター3300B ×2
・サポーターBスペーサー ×2(ランナー)
・ボトムスペーサー3300A ×2
・ジョイントナット ×2
・小径ホーンB ×2
・ビス類
■搭載方法
1)用意したサーボを二つともID12に書き換え、通信速度を1250000bpsに変更してください。

※搭載するサーボが19個以上になりますと通信速度を1250000bpsに変更する必要があります。
搭載する全てのサーボを125000 0bpsに変更してください。
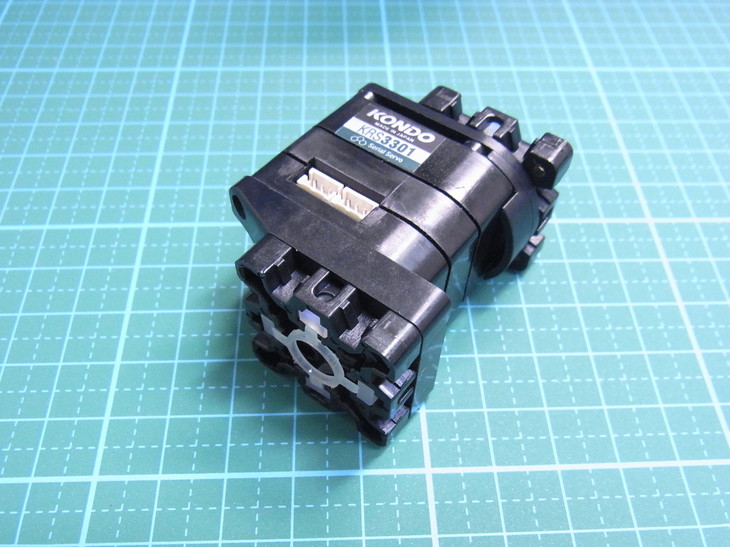
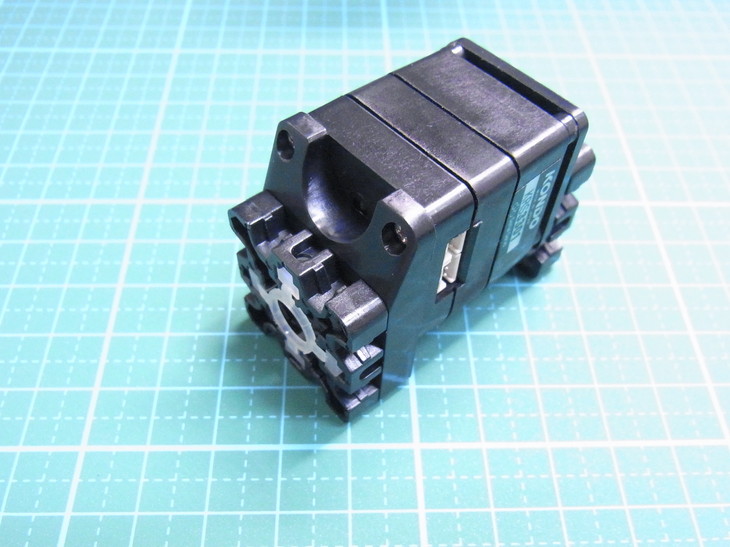
2)前回と同じ方法で下記の状態までユニットを組み立ててください。

3)KXR-L2の腕を上腕の部分から取り外します。
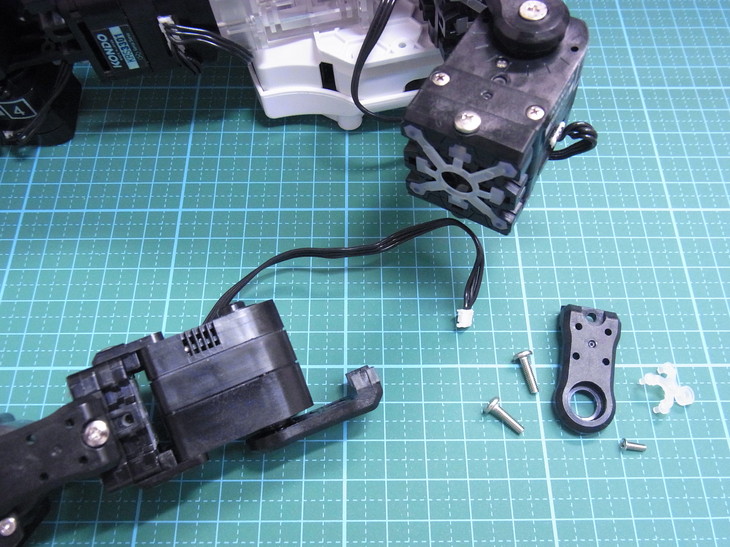
4)上腕に残ったジョイントベースも取り外します。
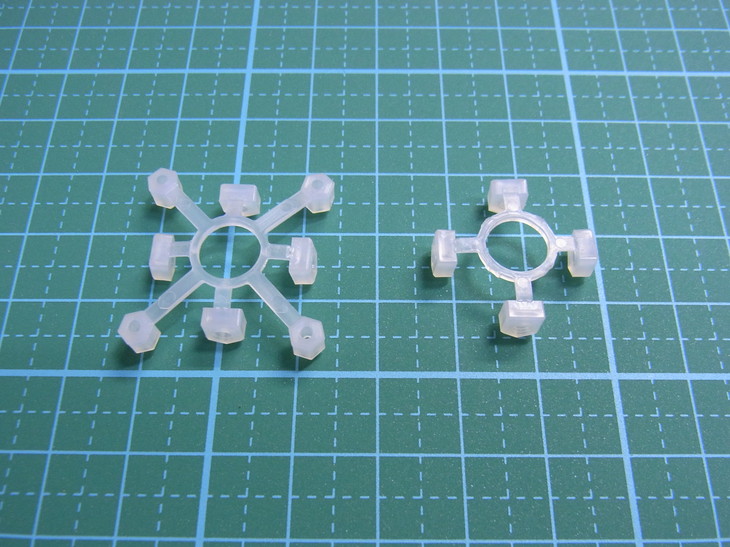
5)取り外したジョイントベースからジョイントナットを抜き取り、画像右側のようにM-2部のナットを切り離します。加工したジョイントナットはジョイントベースに再び取り付けます。
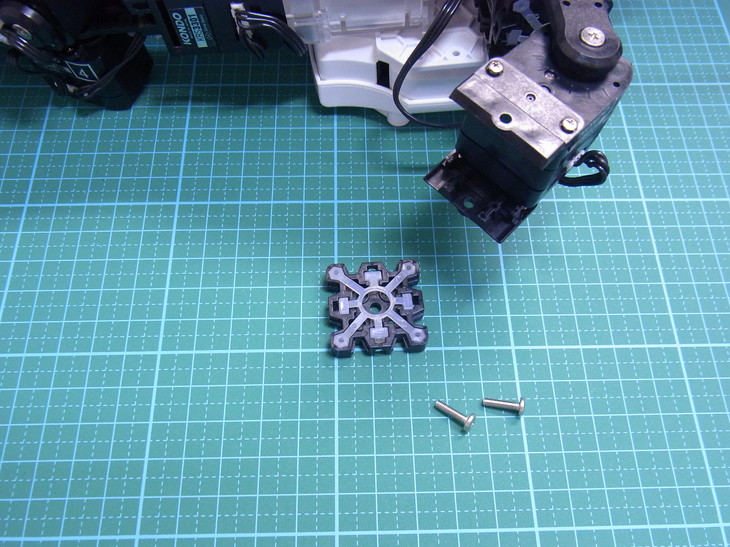
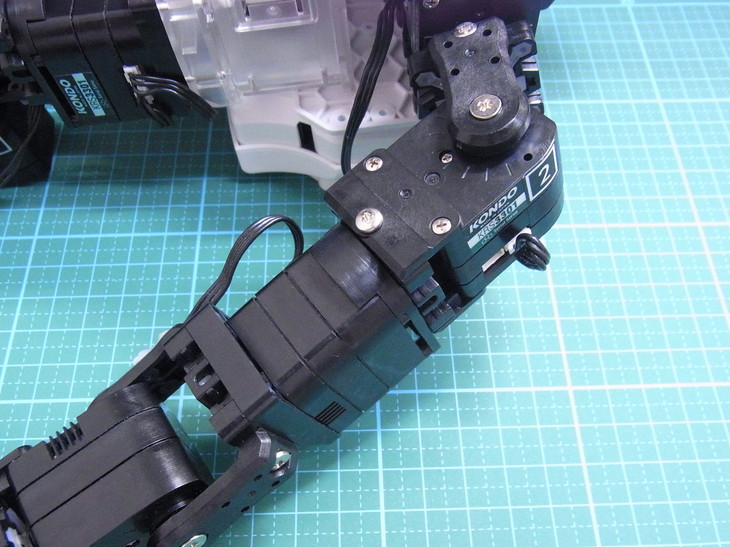
6)組み立てたユニットのボトムスペーサーにM2-8ビスでねじ止めします。
7)取り外した前腕とユニットを合体させます。

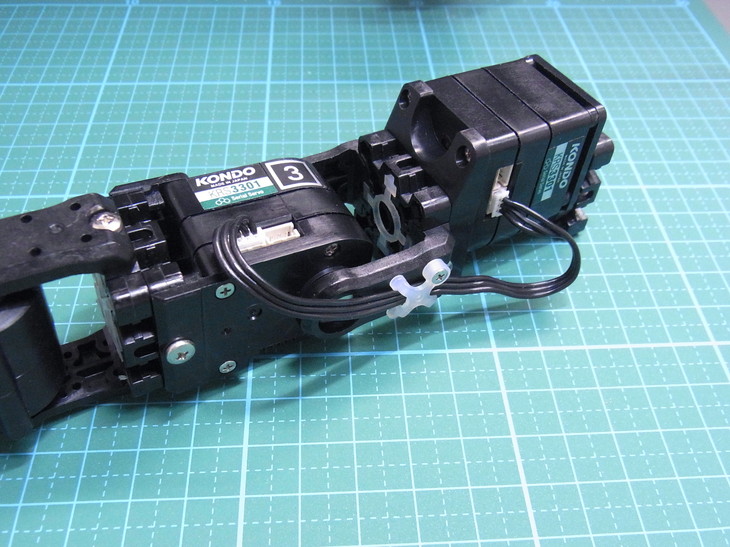
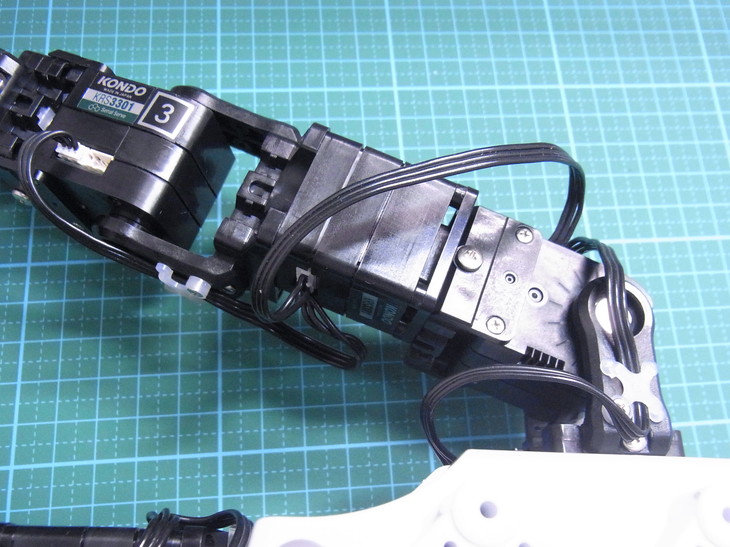
8)画像のようにID3に接続されていたZH接続ケーブルを追加したID12に配線してください。
9)さらに、組み立てた腕を本体の上腕に合体させます。
10)最後に用意したZH接続ケーブル2A(200mm)を配線します。
以上で作業は完了です!

■動画
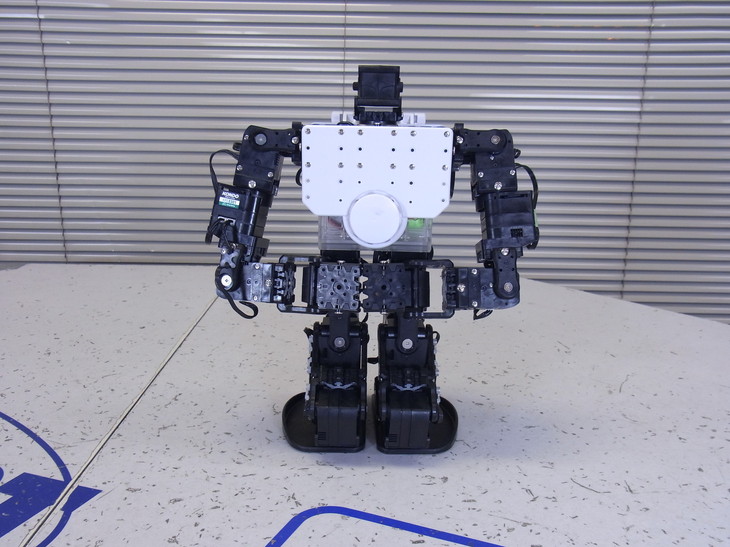
腕が長くなりましたので前回できなかった起き上がりができるようになりました。また、腕をひねるように動かせるようになりましたので、手を前に合わせるポーズや左右に広げるポーズなど、モーションの幅が増えました。
■サンプルプロジェクト
旋回軸、腕ヨー軸を追加した状態のサンプルプロジェクトを公開します。ダウンロードしてご利用ください。
![]() <ダウンロード>
<ダウンロード>
・「XL2-20DOF_xxx_ヨー軸旋回」モーションが旋回軸を使用した旋回モーションです。
・次回でご紹介する腕のヨー軸を追加した状態のプロジェクト設定になっています。
■バッテリについて
サーボを増やすごとに必要な電力が増えてきますが、16軸を超えた場合はニッケル水素タイプのバッテリで動作できない場合があります。特にKRS-3304は、必要な電力が大きいため注意が必要です。
ニッケル水素タイプのバッテリで動作できない場合は、リチウムフェライトバッテリ「ROBOパワーセル F2-850タイプ (Li-fe)」をご利用ください。

※KXR付属のBX-32MHでは充電できません。必ずLi-Fe対応のBX-31LF、またはBX-20LFをご利用ください。
初めてリチウムフェライトバッテリをご利用の際は、下記に記事を必ずご一読ください。
以上です!ぜひお試しください!