
KXR-L2G用高高速移動モーション

アドバンスセットAのセット内容でKXR-L2Gを組み立てた場合、脚部のサーボがKRS-3304 ICSになりますが、今回はこのハイトルクなサーボを活かして最高速の移動モーションを作成しました。
また、バトルでもおなじみのジャンプ旋回も付属しています!
ボタン配置もバトルに特化した内容に担っていますので、ROBO-ONEやKONDO BATTLEでのご利用におススメです。
ぜひ以下よりダウンロードしてご利用ください!
![]() Hello_KXR-L2G_Battle(V1.1).zip
Hello_KXR-L2G_Battle(V1.1).zip
■動画
■ボタン配置
↑ 高高速移動前
↓ 高高速移動後
← 高高速移動左
→ 高高速移動右
S2 ジャンプ旋回左
S4 ジャンプ旋回右
これまでの高速移動、旋回モーションは下記の内容でボタン登録されています。
S1+↑ 高速移動前
S1+↓ 高速移動後
S1+← 高速移動左
S1+→ 高速移動右
↑+← 左旋回
↑+→ 右旋回
【需要なお知らせ】
パンチモーションは、全身のサーボをいっせいに動かすため電圧が下がりやすいですが、試合中に「電源電圧低下時のモーション再生」が再生されないように電圧の閾値を下げています。ご利用の際は満充電のバッテリーをご利用の上、試合ごとにバッテリーを交換するようにしてください。バトル以外でご利用の場合は、閾値を6.0Vに設定してご利用ください。
【ご利用前にご確認ください】
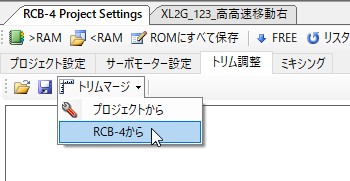
※ご利用の際はトリムの調整をしっかりと行ってください。すでにトリム調整をお済の場合は、トリム調整画面から「トリムマージ」→「RCB-4から」を選択し、ロボットからトリムデータをプロジェクトに反映させてください。
※高高速移動は、ジャイロセンサーを使用した状態を想定しています。必ずジャイロを搭載してからご利用ください。
搭載方法はこちらをご参照ください。
※起き上がりモーションは、S3に登録されています。こちらは加速度センサーRAS-3を使用した自動判別モーションに割り当てられていますので、RAS-3を搭載していない場合はボタン配置の変更をお願いします。
RAS-3を使用すると一つのボタンで起き上がりモーションを使い分けつことができますので大変便利です。
搭載方法はこちらをご覧ください。
※こちらは、バトル用のボタン配置になっています。「掴んで移動する」関連のモーションはボタン配置されていません。
※ボタンを押し続けた状態で連続歩行をするために「CmpButton」コントロールを使用しています。ボタン配置を変える場合は、モーション内の「CmpButton」も変更してください。