
組立ポイント セレーションとニュートラル
今回の組立ポイントは、サーボのセレーションとニュートラルについてご紹介します。
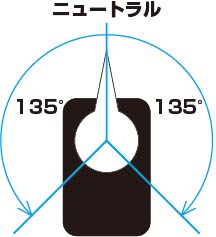
■ニュートラルとは
サーボのニュートラルとは、動作角の中心位置のことです。サーボは左右同じ角度に動作しますので、その真ん中がニュートラルになります。
ちなみに、KXRシリーズで採用されているKRS-3300シリーズは動作角が最大270°ですので、ニュートラルから左右135°動作します。
■セレーションへのパーツの取り付け
サーボの出力軸にあるギザギザをセレーションと呼びます。ここにパーツを取り付けることで、サーボの回転を関節として使用することができます。

セレーションへパーツを取り付ける際に、溝がずれていると直立した際に関節がずれてしまいます。組み立て後にトリム調整(ソフトで関節をまっすぐにする作業)を行いますので多少のずれは修正できますが、大きなずれはサーボの動作に影響が出てしまいますので、慎重に取り付けを行ってください。
取り付け作業の前にサーボのセレーションにある丸い目印が真上にあることを確認してください。出荷時にニュートラル(動作角の中心)にあるように調整されていますので、すべて真上にあるはずです。

●サーボアームを取り付ける場合
画像のように真っ直ぐ取り付けてください。
●小径ホーンを取り付ける場合

小径ホーンの丸い目印が真上になるように取り付けてください。
●直行軸フレームへ取り付ける場合
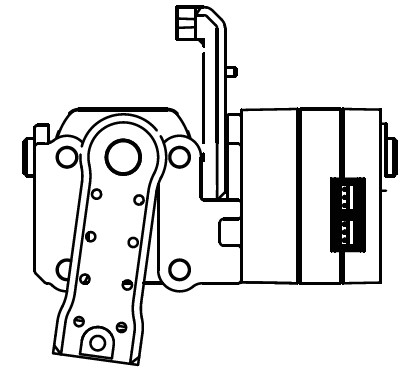
直交軸へ取り付ける場合は少しずらして取り付ける必要があります。アームをニュートラル位置にして溝一つ分左にずらした個所に挿入します。画像を参考に取り付けてください。
■組み立て途中でニュートラルがずれてしまったら
セレーションへのパーツの取り付け時にニュートラルからずれてしまった場合、パーツの付け直しが必要になりますが、その際にパーツはしっかりとはまってしまっているますので、取り外しに力が入ります。その反動で軸が回転し、軸のニュートラル位置がずれてしまう可能性があります。
もしニュートラルがずれてしまった場合は、以下の手順を参考に位置を見つけてください。
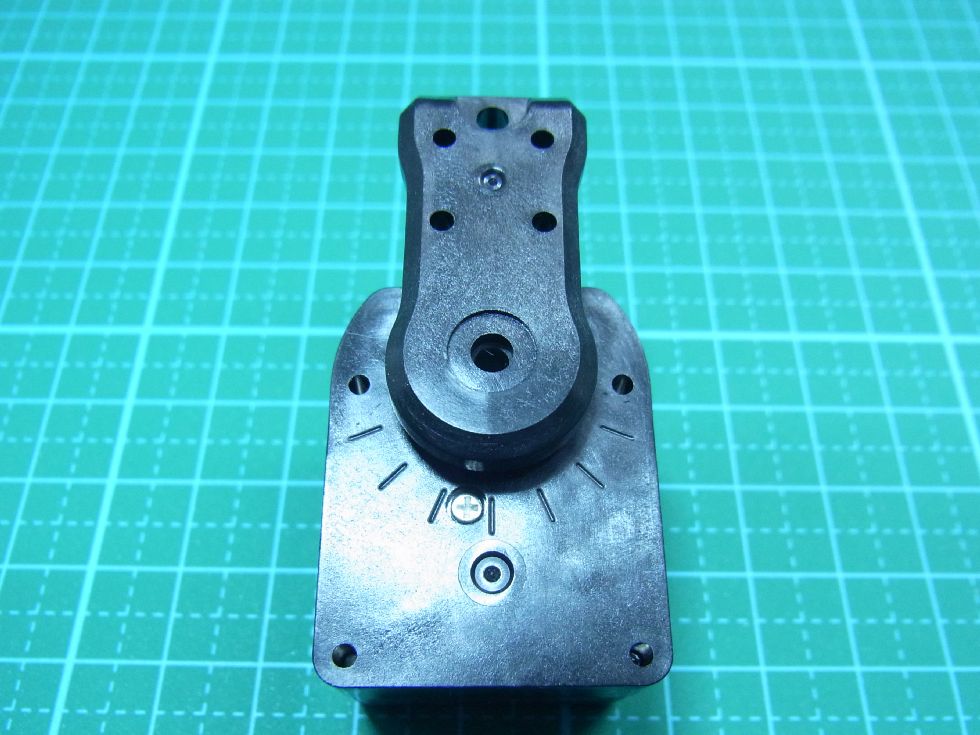
●出力軸の丸いしるしを参考にする
出力軸には、セレーション位置に丸いしるしがあります。これを参考にニュートラルとパーツを合わせて取り付けることが可能です。
●サーボマネージャーでニュートラル位置に戻す
サーボマネージャーを使用して、サーボの軸を動かしニュートラル位置をセンターに戻すことが可能です。
以下のアイテムを使用します。
・Dual USBアダプターHS
・シリアル延長ケーブル
・ZH変換ケーブル
Dual USBアダプターHSを使用するためには、PCにドライバーソフトをインストールする必要があります。組み立て完了後に必ず行う作業ですので、この際に行ってしまえばロボット本体の調整が後々スムーズに行えます。
付属のCD-ROMに収録されている「USB」フォルダ内のKO Driver2015をインストールマニュアルを参考にインストールしてください。最後にCOM番号を調べる手順がありますので、COM番号をメモしてください。
以下のページからもドライバーをダウンロードできます。
ダウンロードページ『KO Driver2015』
ダウンロードが完了したら、サーボとUSBアダプターをケーブルでつなぎます。
USBアダプターのスイッチを切り替えてLEDが赤に点灯していることを確認します。
(サーボにつなぐときは赤、コントロールボード(RCB-4miniなど)につなぐときは緑と覚えてください)
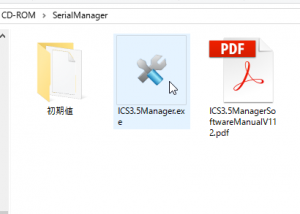
同じくCD-ROMに収録されている「SerialManager」フォルダ内のICS3.5Manager.exeをクリックしソフトを立ち上げます。
以下のページからもマネージャーソフトをダウンロードできます。
ダウンロードページ『ICS3.5 マネージャーソフトウエアR1.0.0.3』
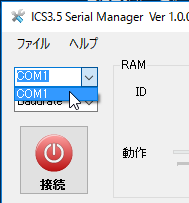
ソフトが立ち上がりましたら、COM番号を選択します。
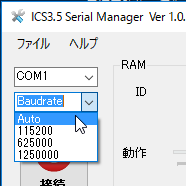
次に通信速度を選択します。出荷時では「115200」になっていますので、変更していなければ「115200」を選択してください。または、Autoを選択すれば自動で通信速度とIDを割り振りますので便利です!
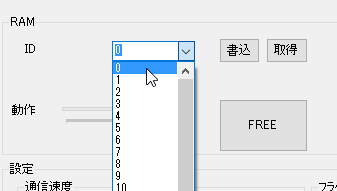
Autoを選択していな場合はIDを設定します。サーボに張り付けてあるIDシールを参考に選択してください。〇と▢はID番号に関係ありませんので、数字のみ参考にしてください。
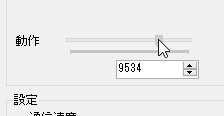
「動作」のスライドバーを動かしてサーボが動作するか確認します。
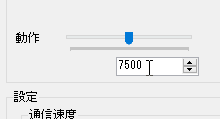
サーボの角度が表示されているテキストボックスに「7500」と打ち込んでEnterキーを押してください。「7500」がサーボのニュートラル位置です。
以上の作業でサーボがニュートラル位置に戻ります。
このマネージャーソフトでは、IDの書き換えや通信速度の変更、その他パラメーターの調整を行うことができます。詳細は、マネージャーソフト付属のマニュアルをご参照ください。
ID書き換え機能は、サーボ単品をご購入して追加した際に必要ですので、ぜひ覚えておいてくださいね!
作業を終了したらサーボを抜いて、ソフトを閉じてください。
組み立て完成後の作業でコントロールボードRCB-4miniと通信する場合は、Dual USBアダプターHSのLEDを緑にする必要がありますので予め変更しておくようにしましょう。
以上です。