
ジャイロセンサーを搭載する
KXR-L2 ヒューマノイド型は、ジャイロセンサーを搭載することでより安定した歩行ができるようになります。今回は、付属のサンプルプロジェクトを使用してジャイロセンサーの搭載と設定の方法をご紹介します。
こちらの内容は、以下のPDFでもご覧いただけます。
■必要なパーツ
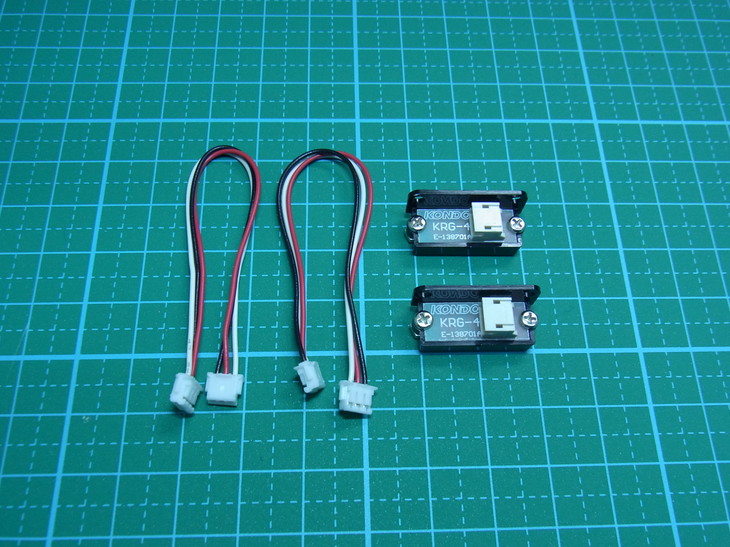
必要なケーブルが付属していますので、準備はこちらのセットのみでOKです!
■ジャイロの効果
ジャイロセンサーは「角速度」(時間当たりの角度の変化量)を検出するセンサーです。
ロボットの姿勢により値が変化しますので、バランスを崩した割合によって補正をかけることができます。
KXRでは、脚部の関節にバランスがずれた方向とは逆の角度に回転する制御を行い、姿勢の自動補正を行っています。
今回使用するジャイロセンサーKRG-4は1軸のジャイロセンサーですので、1方向の角速度を検出できます。このジャイロは、コネクタを上面にして垂直方向の角速度を検出します。

では、まず搭載方法をご紹介します。
■搭載方法
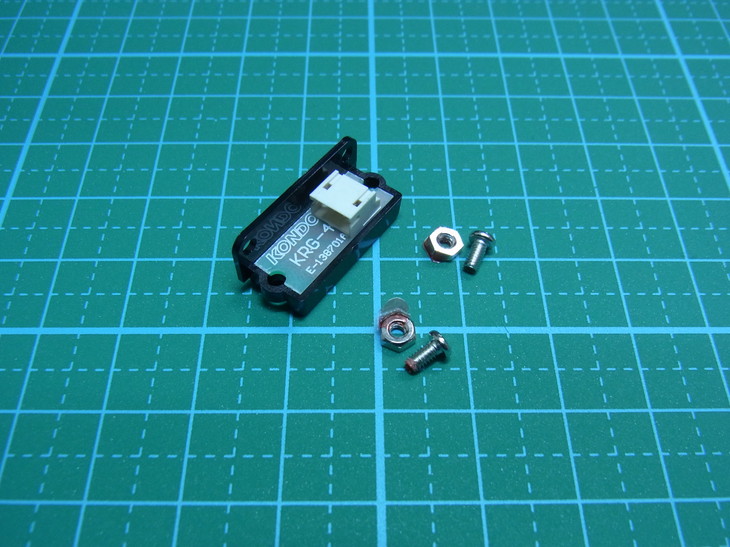
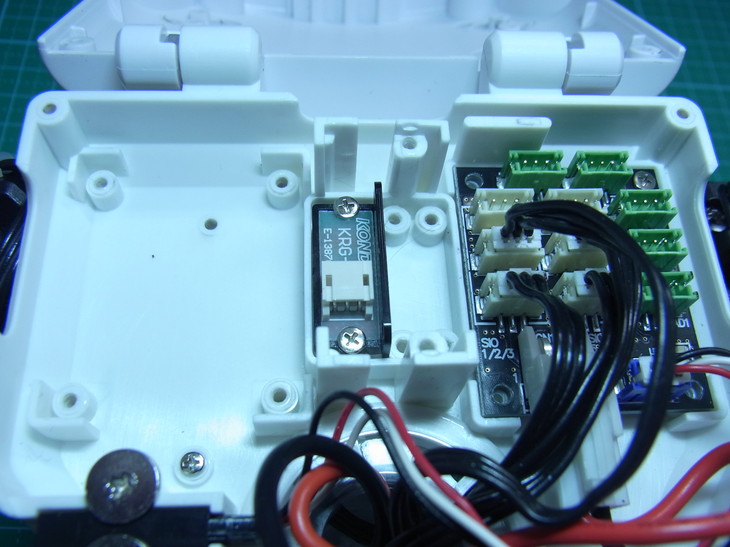
バックパックの中央部分に専用の搭載スペースがありますので、ここにビス止めします。ビスはKXRの組み立てで余ったM2-6ビスを使用します。
1)まず、搭載スペースの左側にジャイロを寝かせて搭載するために、ジャイロに本体に固定されているビスを予め取り外します。これはジャイロ一つだけでOKです。外したビスは使用しませんが万が一のために保管しておきましょう。
2)ビスを外したジャイロを搭載スペースにM2-6ビスでビス止めします。ビスを外した穴をそのまま利用して固定してください。
このジャイロは左右方向の角速度を検出します。
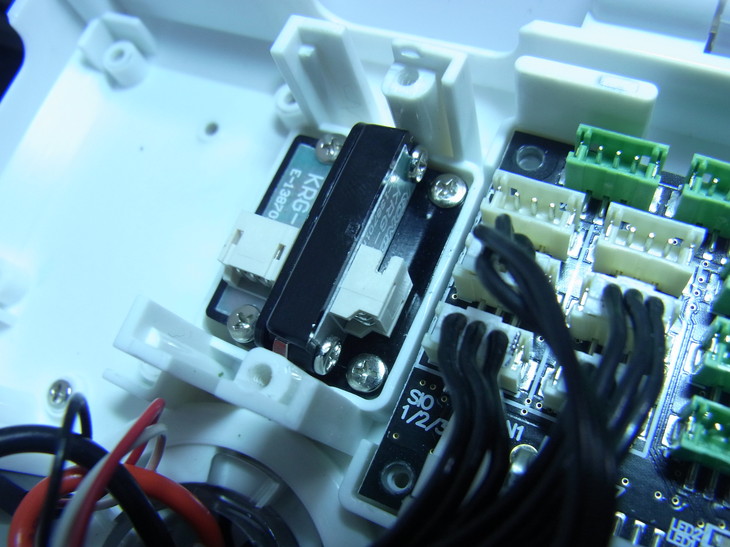
3)右側は、90度起こして立てるように搭載します。M2-6ビスで固定してください。
このジャイロは前後方向の角速度を検出します。
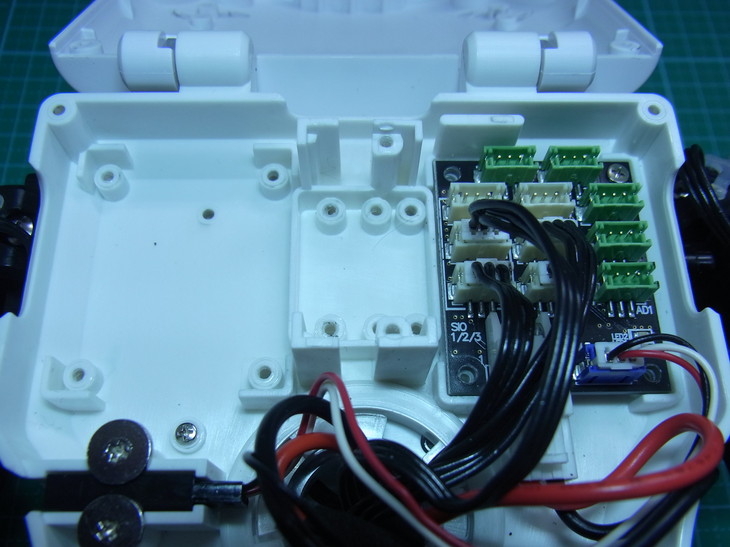
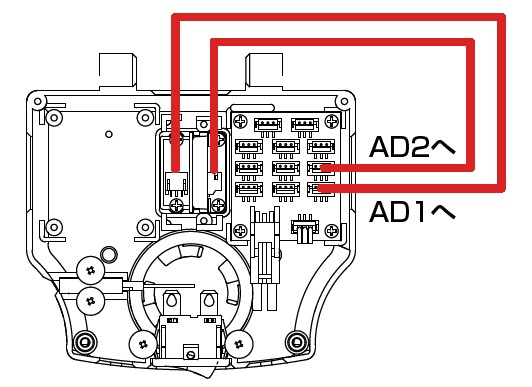
4)ケーブルはRCB-4miniのADポート1と2に接続します。左側の寝かせたジャイロはAD1へ、右側の立てたジャイロはAD2へ接続してください。ジャイロ付属の白赤黒の三本平行線を使用してください。
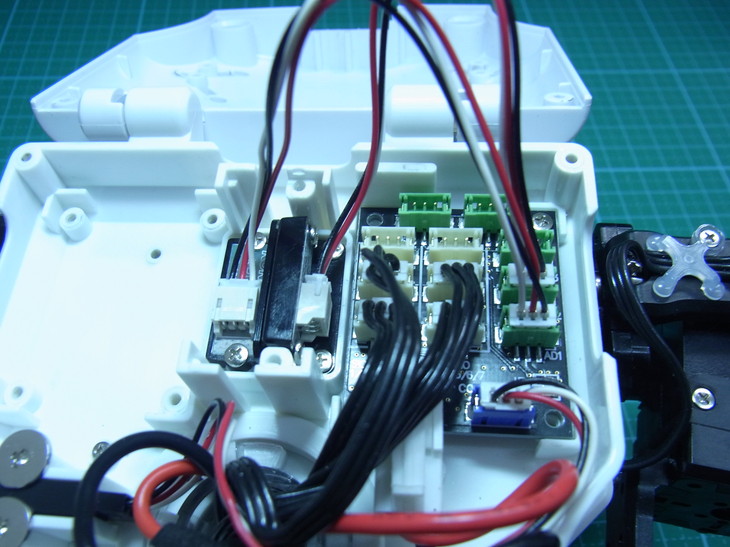
以上で搭載は完了です。非常に簡単ですね!
次に設定方法です。設定にはHeartToHeart4を使用します。
■設定方法
1)HeartoHeart4を起動し、サンプルプロジェクト『Hello_KXR-L2(Vx.xx)』を展開します。展開するためには、プロジェクトブラウザウィンドウのフォルダ内にある.h4pのファイルをダブルクリックします。
2)COMポートの番号も指定してください。
※COM番号はご利用のPCによって異なります。詳細はKO Driver付属のマニュアルをご参照ください。
3)Syncをアクティブにします。

4)プロジェクトウィンドウを開きます。

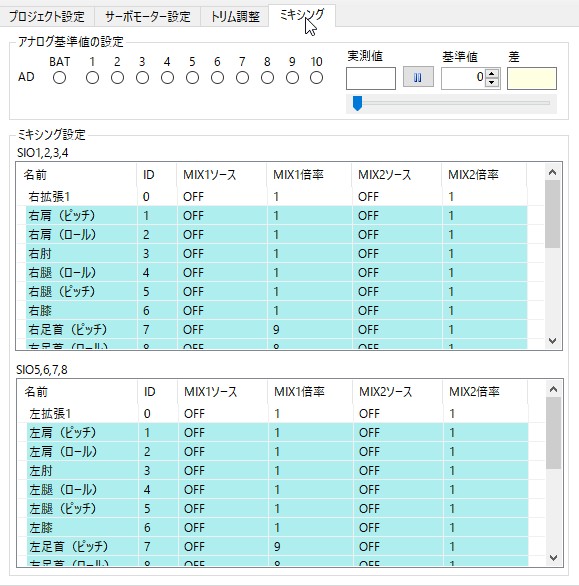
5)タブで「ミキシング」画面に切り替えてください。
●ミキシング機能について
この画面には、センサーが検出した値に対して各関節にどれくらいのミキシングをかけるかを設定できます。
今回のミキシング設定では、ロボットがバランスを崩した方向と逆方向に関節を動かすことで、ロボットの姿勢を保つように自動補正します。人間でも倒れそうになった時に、足首やひざを逆方向に曲げて姿勢を保とうとしますが、これと同じ状況をロボットにも行わせるのがこの機能です。
ミキシングをかける値は、実測値の基準値に対する差です。例えば以下のように設定したとします。
・基準値 = ロボットがまっすぐに立った状態の値
・実測値 = ロボットの姿勢が変わったときに検出された値
【具体例】
・基準値:270
・右足首(ピッチ):サーボID7
・ADポート:AD2
・MIX1倍率:9
AD2は前後方向の角速度を検出しますので、ロボットが前や後ろにバランスを崩したときに値が変化します。ここでは、前にバランスを崩し、値が280になったとします。
すると、実測値と基準値の差で
280-270=10
がミキシングの値になります。これに倍率をかけて
10×9=90
がサーボID7の角度に加算されます。
サーボID7の現在地500+90=590
倒れる方向とは逆に対象のサーボが90の角度が回転しますので、これでバランスを崩すことなく補正をかけることができます。
6)まずは基準値の設定を行います。画面上部「アナログ基準値の設定」のAD1をクリックしください。このボタンを押すとロボットのAD1に接続したセンサーの値をリアルタイムで検出します。ロボットが直立の状態で「取得ボタン」(一時停止デザインのボタン)を押すと基準値が取得されます。実測値と基準値が同じ値であればOKです!
AD2も同じように行ってください。

7)プルダウンメニューから選択して各値を設定します。設定値は以下を参考にしてください。
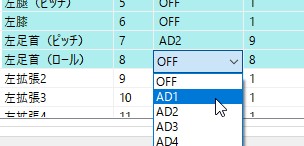

※「MIX2倍率」は設定しないでください。
8)「ROMにすべて保存」ボタンでロボットに設定値を登録します。書き込み完了後に再起動しますので、高速歩行を再生して歩行が安定しているか確認してください。万が一左右や前後への振れが大きくなってしまっている場合は、接続方法や設定値が間違っている可能性がありますので、もう一度各箇所の確認を行ってください。
9)プロジェクトを保存すれば完了です!
今回は、付属のサンプルプロジェクトを使用しましたのでADポートへの接続、各設定値を指定しましたが、ロボットの形によって倍率は異なりますので、オリジナルを組み立てた時は自分で試しながら適切な倍率を見付けてください。
また、ADポートは1、2である必要はありません。AD3に接続したらミキシングのポートをAD3と指定すれば同じように使用できます。
詳細は、HeartToHeart4のソフトウェアマニュアルをご覧ください。
ジャイロを搭載するだけで、歩行の安定性が抜群に良くなりますので大変お勧めですよ!ぜひご利用ください。