
4軸の二足歩行ロボットを作る
KXR-A5 アーム型のセットにはサーボが5個と複数のフレームパーツが付属しています。今回は、これらのパーツを組み合わせて4軸の二足歩行ロボットを組み立てる方法をご紹介します。
■必要な製品
※2017.8.29出荷のKXR-A5 アーム型よりBTレッグプレートが付属になりました。詳細はこちらをご覧ください。
■組立手順
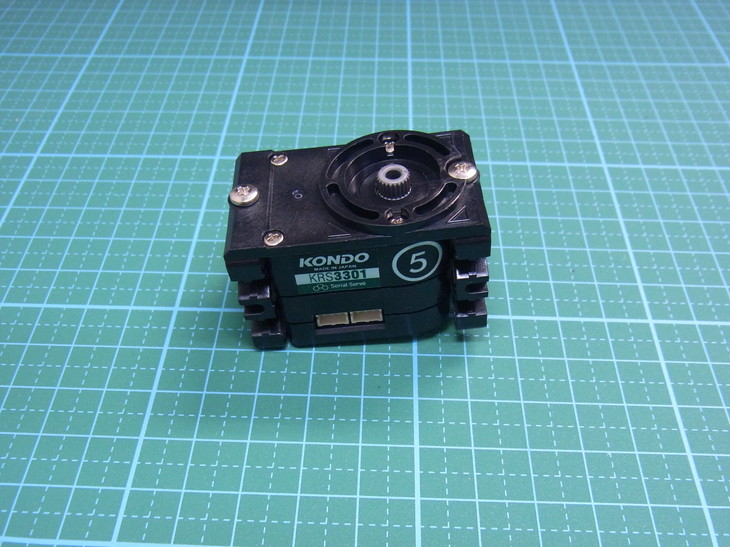
1)サーボに1~5のIDシールを貼り、ICS3.5 マネージャーソフトウエアでシールの数字通りにサーボIDを書き換えます。
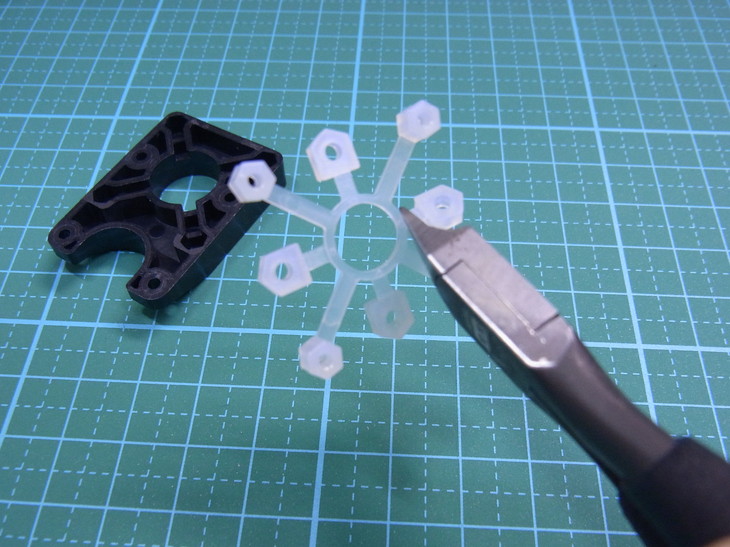
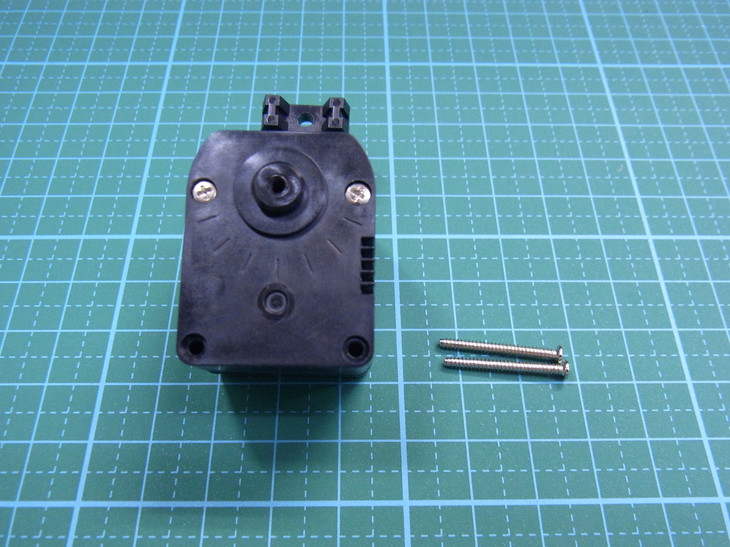
2)ジョイントナットのM2.6ナット部をカットし、ボトムスペーサー3300Aに取り付けます。
カットしたナットの内2個は、バックパックの作成時に使用しますので保管してください。

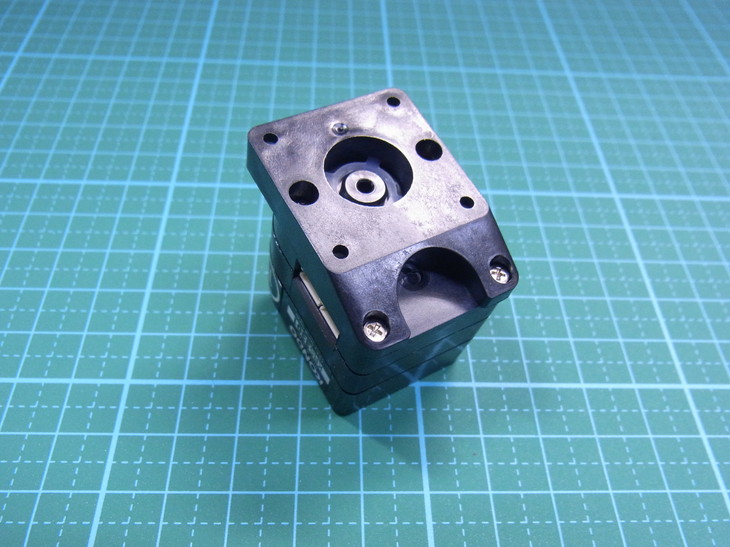
3)ID1のサーボのケースビスをすべて外し、同じビスでボトムスペーサー3300Aを固定します。
取り付け向けに注意してください。

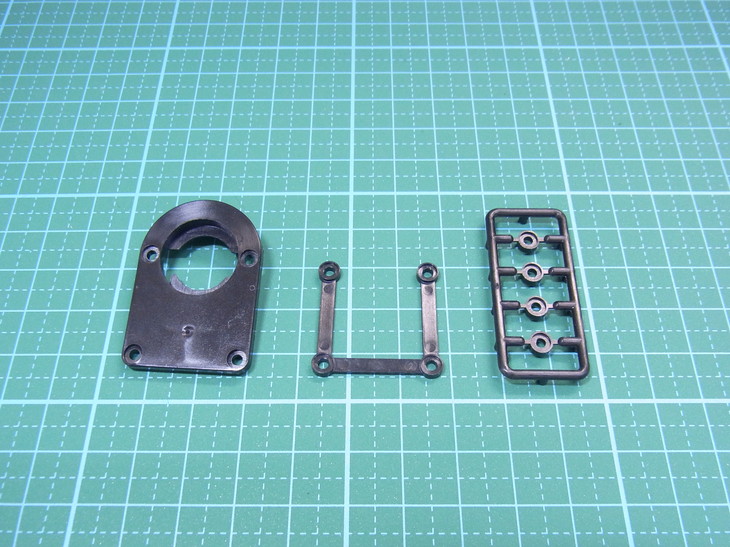
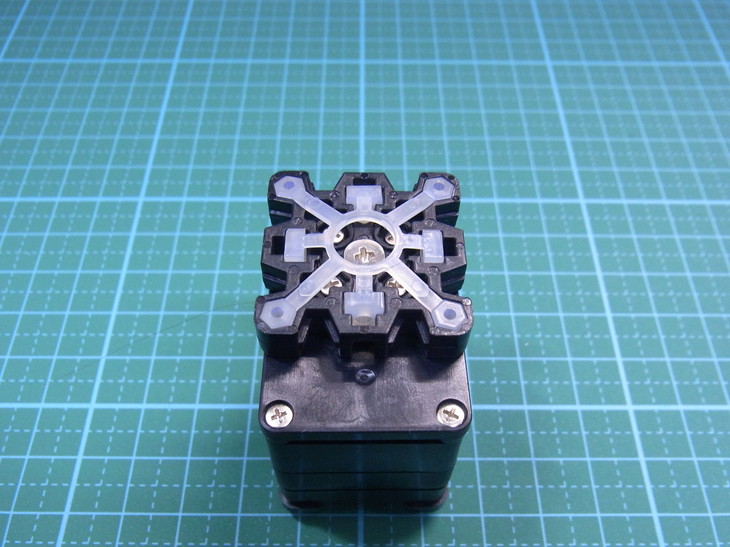
4)ID1のサーボにサポーターBスペーサー、またはボーナスパーツのサポーターBスペーサー2を挟み、M2-6ビスでアームサポーター3300Bを取り付けます。
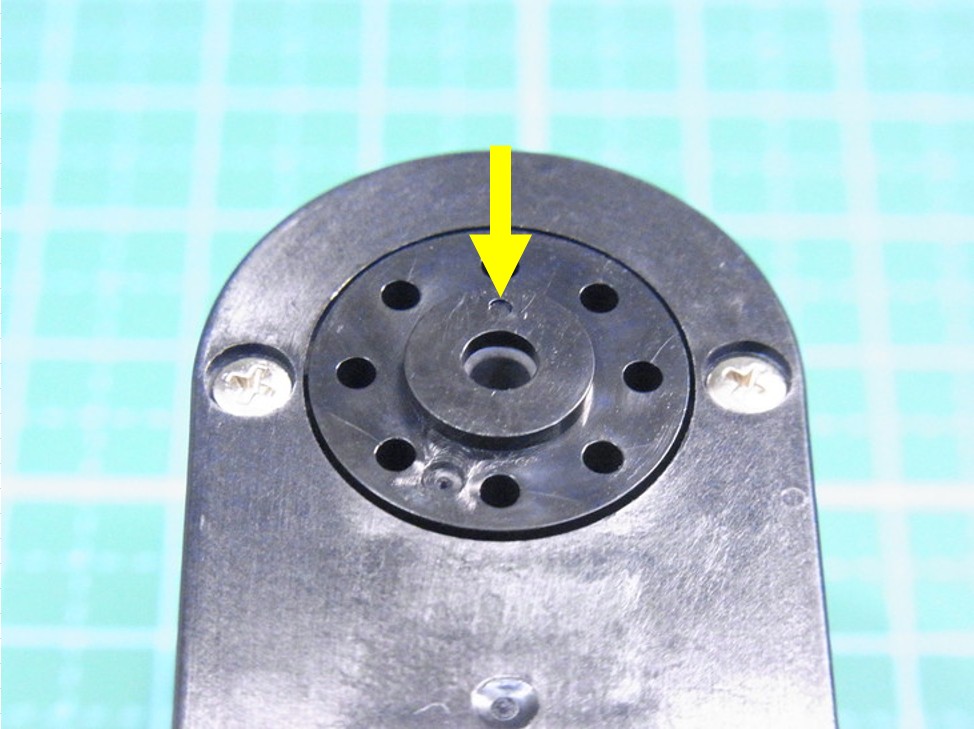
5)画像の矢印の箇所にある印を目印に、ニュートラル位置に合わせて小径ホーンを取り付けます。見づらい場合は画像をクリックし、拡大してご覧ください。

6)小径ホーンにM2-4ビスとM3-6ホーン止めビスでジョイントベースを取り付けます。

7)ジョイントナットを取り付けます。
8)ジョイントフレームAを2箇所に取り付け、M2-10ビスで固定します。

9)ID2のサーボにサーボアーム3300A(26mm)のアッパーアームを取り付け、M3-6ビスで固定します。

10)ID2のサーボのケースビスを2箇所外し、M2-6ビスと外したケースビスでジョイントフレームAに固定します。

11)ジョイントベースにジョイントナットを取り付け、M2-8ビスでソールに固定します。

12)ソールとアッパーアームをM2.6-10ビスで固定し、ボトムアーム同様にも取り付けます。軸のビスは、アッパーアーム側はM3-6、ボトムアーム側は2.6-4ビスを使用してください。

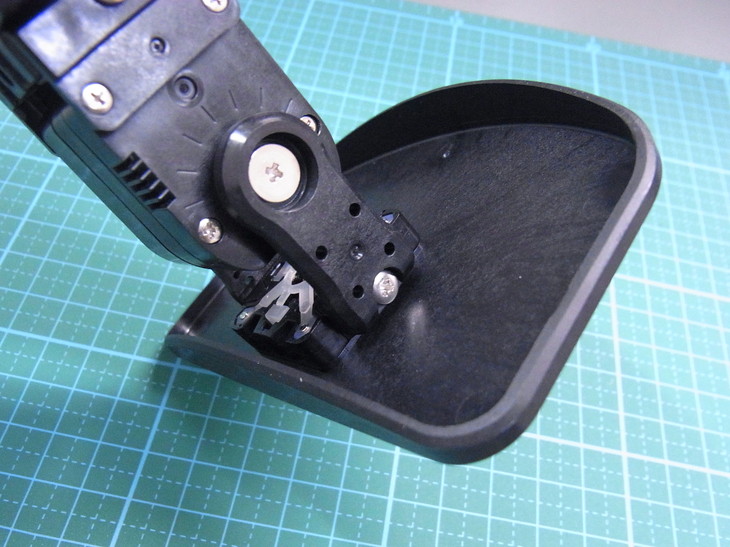
13)片足ができました!

14)ZH接続ケーブル2A(120mm)でID1とID2を接続します。



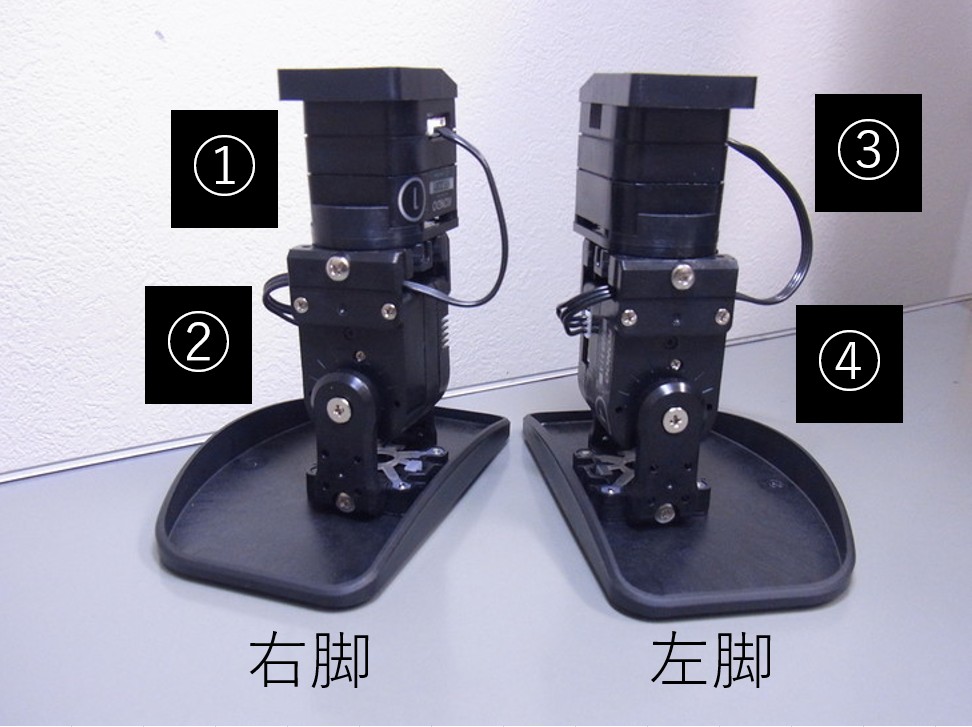
15)ID3、ID4でもう一脚作成します。組立方法は全く同じですが、ソールの向きが反対になりますのでご注意ください。
画像のように、ID2、ID4のアッパーアーム側がロボットの前側になります。
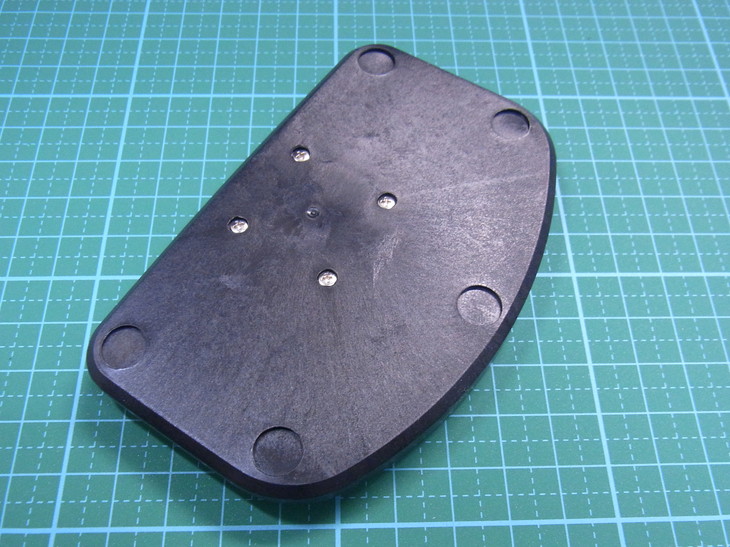
16)両足をM2-8ビスでBTレッグプレートに固定します。


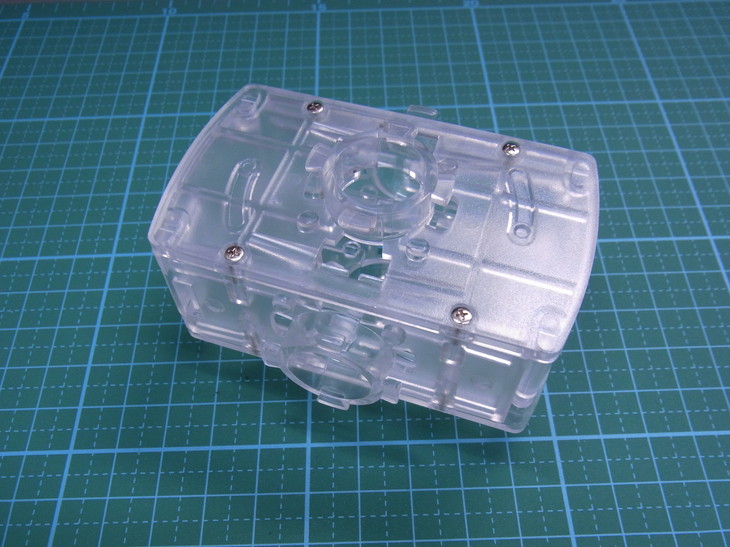
17)バッテリーボックスを組み立てます。
組み立てはこちらを参考にしてください。
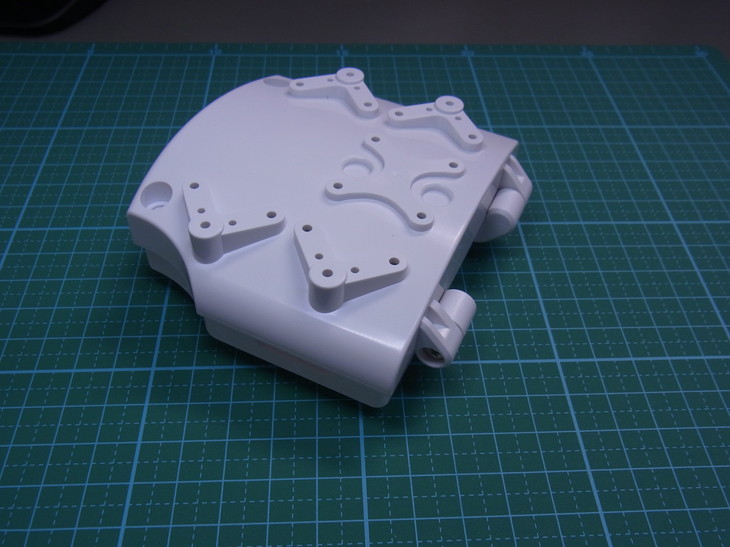
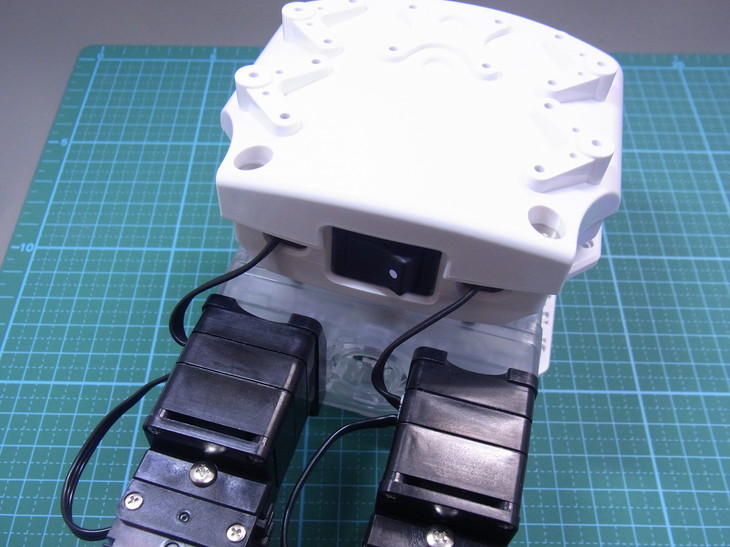
18)レッグプレートをバッテリーボックスに固定します。
これで下半身が完成です!
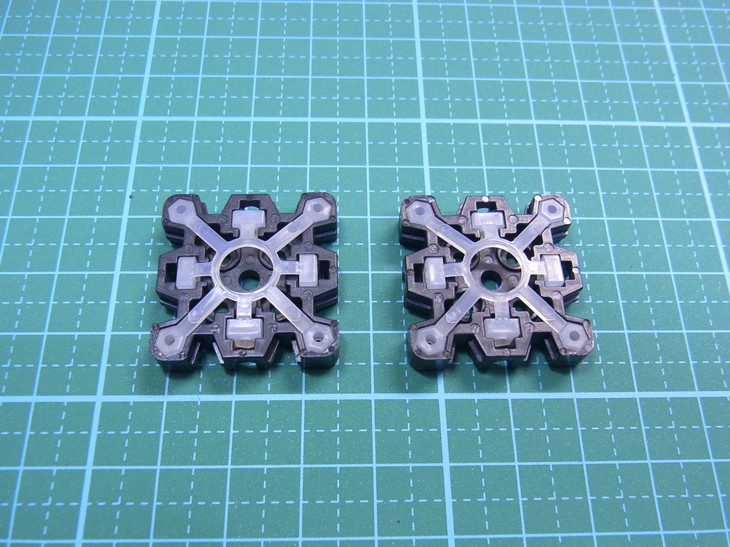
19)ジョイントベース+ジョイントナットを2セット用意します。
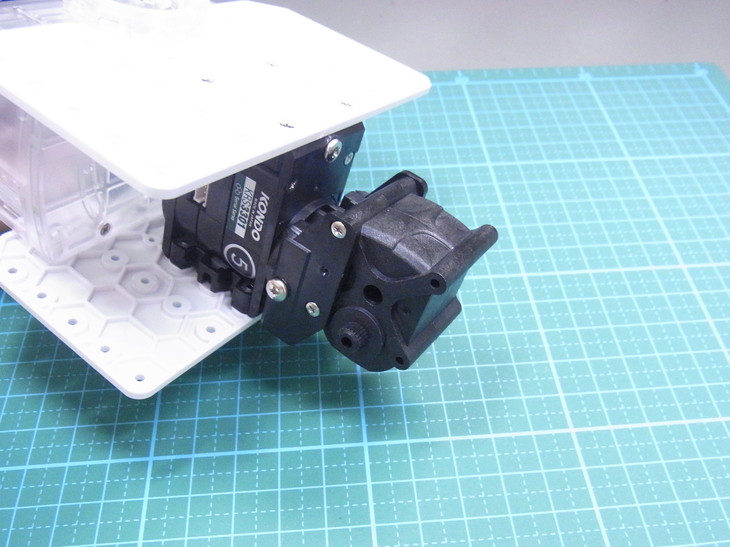
20)ID5のサーボにM2-6ビスでアームサポーター3300Aを取り付けます。

21)アームサポーター3300Aの上下にジョイントベースをM2.6-10ビスで固定します。
22)ID5のサーボのケースビスをすべて取り外します。

23)ボトムケース側にもアームサポーター3300Aを取り付けます。ビスは外したケースビスとM2.6-10を使用します。

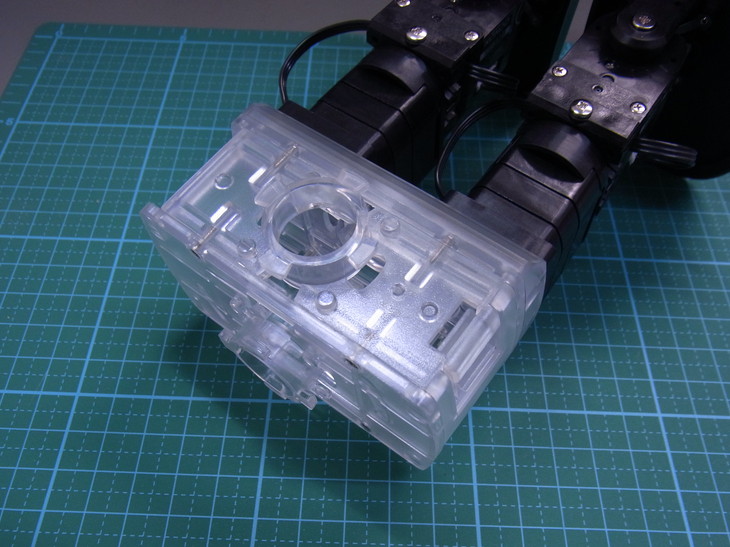
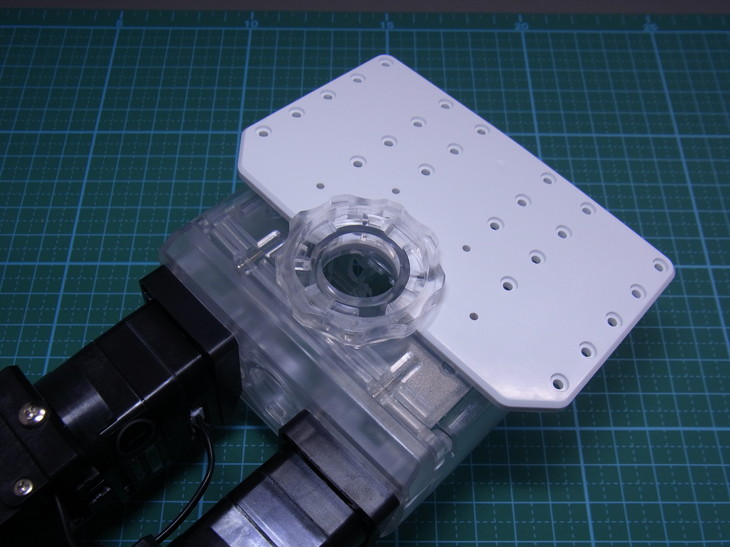
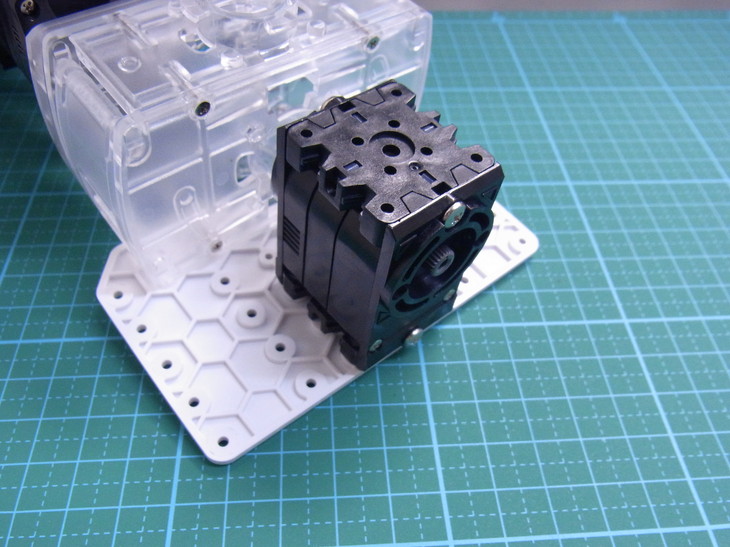
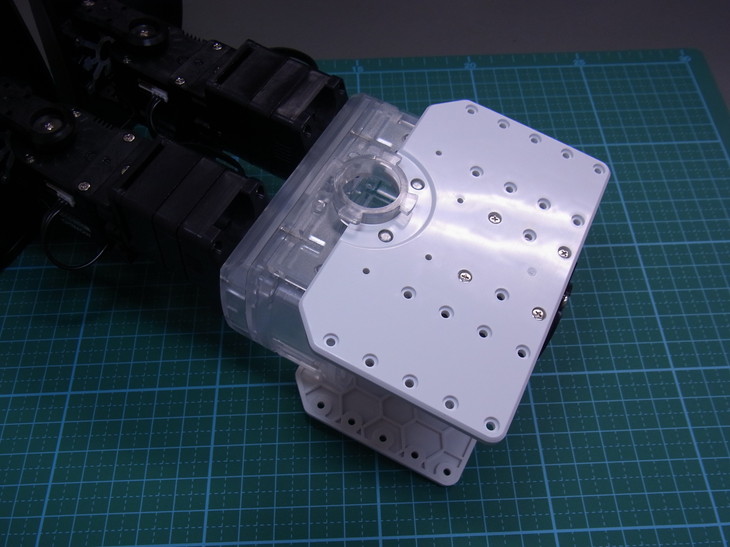
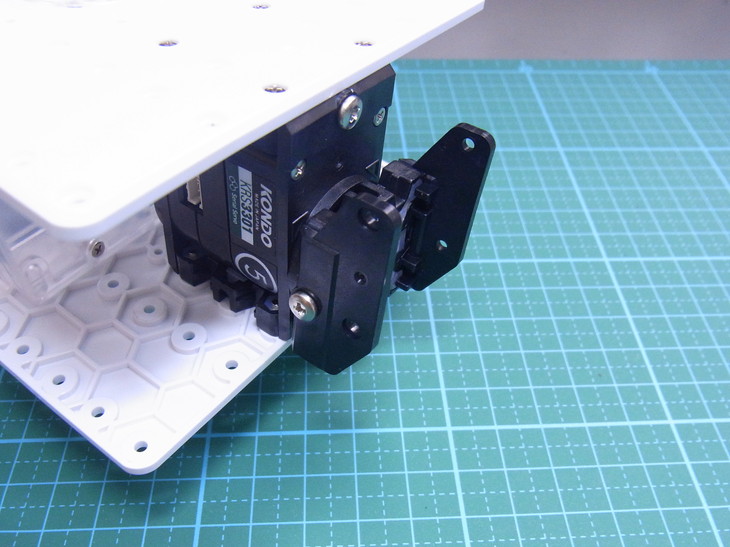
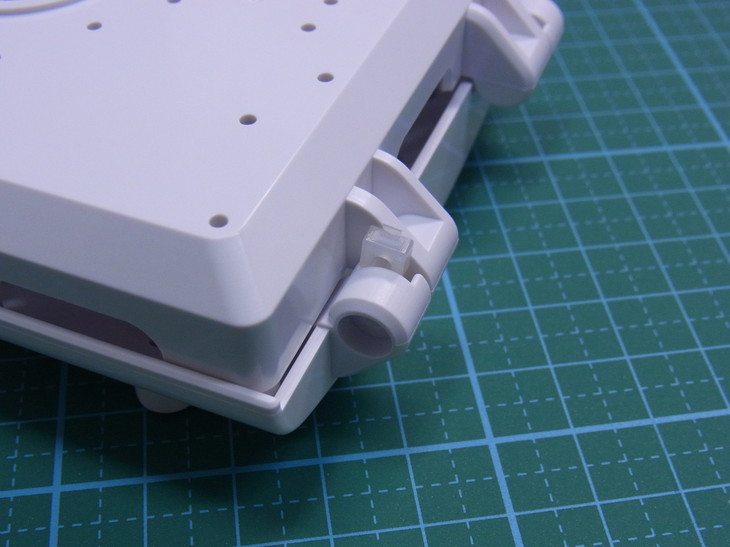
24)完成した下半身のバッテリーボックスの前側にボディープレートを取り付けロックリングで固定します。
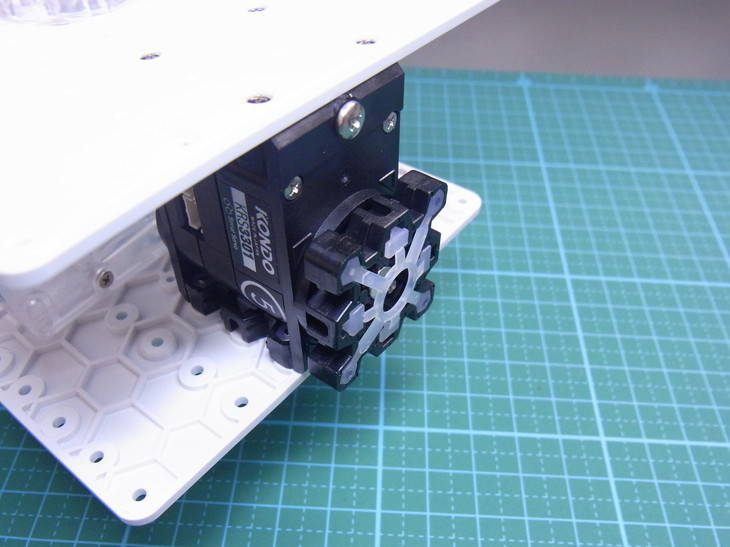
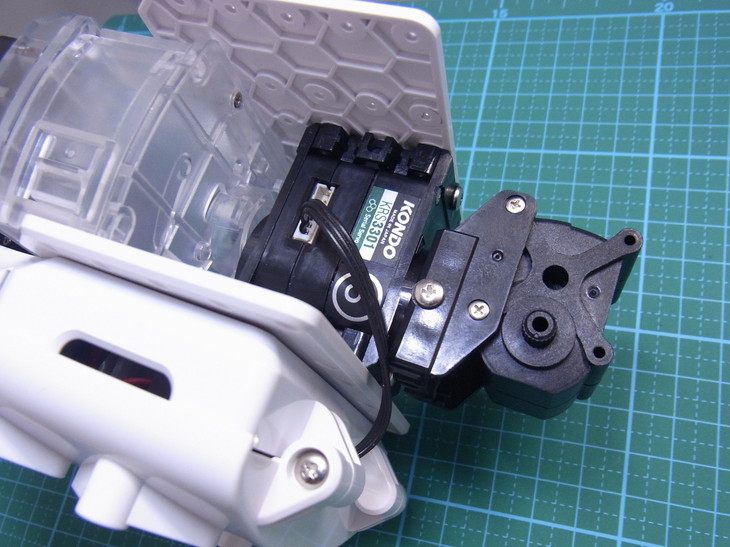
25)ボディープレートにID5のサーボをM2-8ビスで固定します。
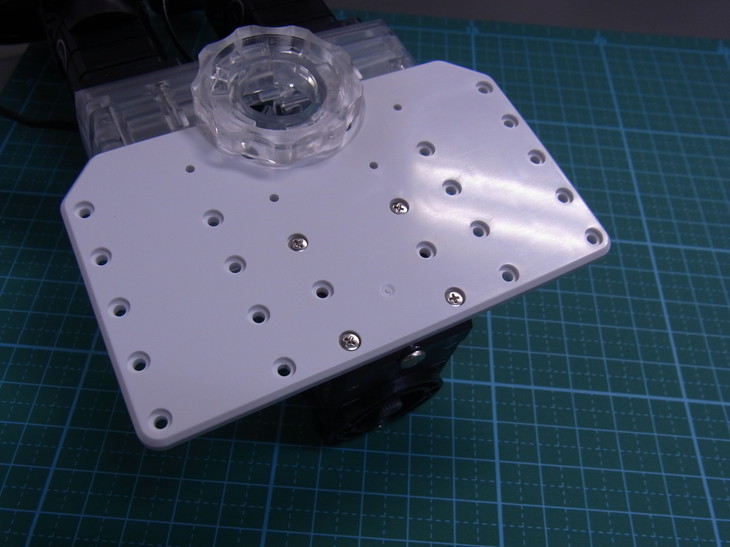
26)もう一枚のボディープレートを挟むように後側にもM2-8ビスで固定します。
27)手順5)~7)と同じようにID5のサーボに小径ホーンを取り付け、ジョイントベースをM2-4ビス、M3-6ビスで固定し、ジョイントナットを取り付けます。
28)ここにジョイントフレームBを両側に取り付けます。ビスはM2.6-10を使用します。
29)ダミーサーボを1つ組み立て、ジョイントフレームにM2-6ビスで固定します。
30)手順2)でカットしたM2.6ナット部を使用してバックパックを組み立てます。
31)胴体の後側にバックパックを取り付け、M2-6ビスで固定します。
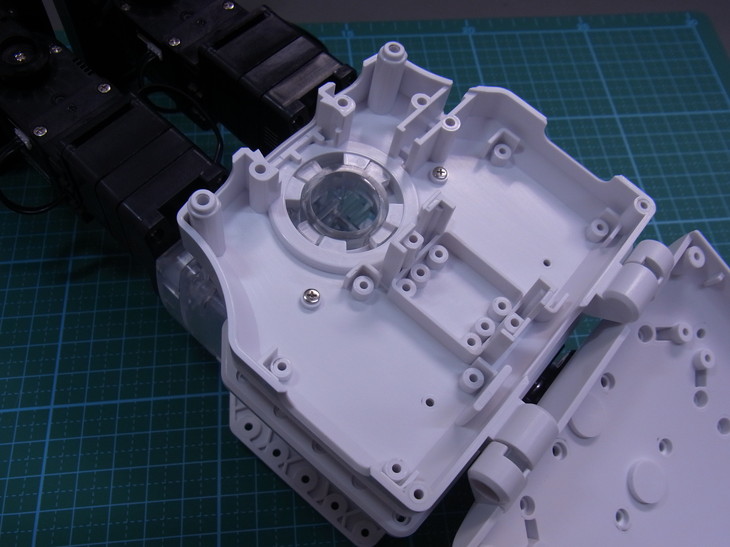
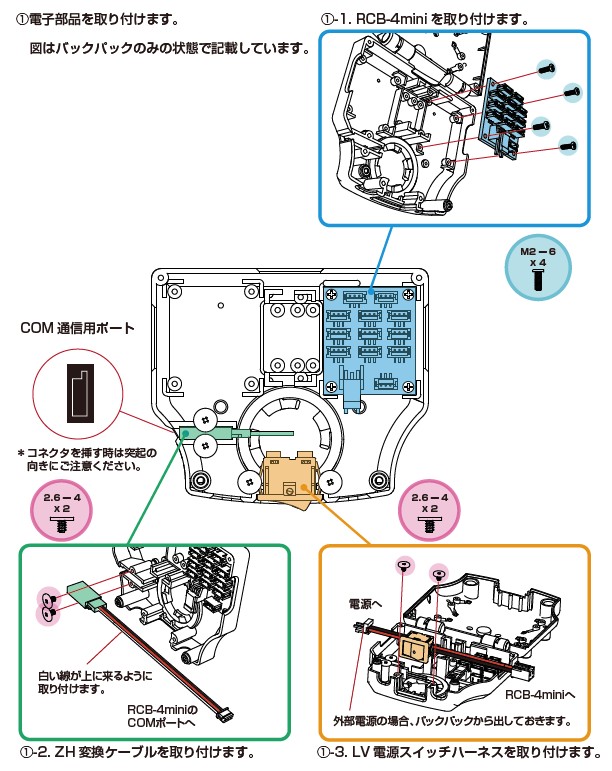
32)RCB-4mini、スイッチハーネス、ZH変換ケーブルを固定します。各固定箇所は付属の組立説明書をご参照ください。
33)ID1、ID3のサーボにZH接続ケーブル2A(160mm)を接続します。
34)ID5のサーボにZH接続ケーブル2A(200mm)を接続します。
35)RCB-4miniのSIO 1/2/3に、サーボのID 1/3/5のケーブルを接続します。SIO1/2/3の端子は、回路上でつながっていますので、各ケーブルがこの3箇所のいずれかに接続されていれば問題ありません。
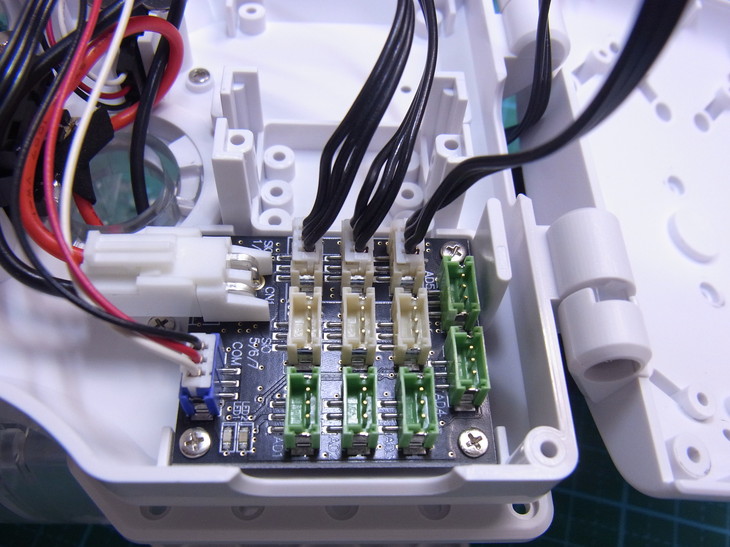
36)バックパックと閉じるときは、各隙間にケーブルを通してください。最後に2.6-4ビスでバックパックを固定します。
以上で完成です!!

■動画
この動画では、バッテリーを使用していますがKXR-A5 アーム型のキットにはバッテリーは付属していません。セット付属のACアダプターでも動作可能ですが、バッテリーを使用する場合は、ROBOパワーセル Eタイプ 6N-800mAh(Ni-MH)を別途ご用意ください。また、充電器は、BX-32MH ニッケル水素専用充電器がお勧めです。
■サンプルプロジェクト
動画で再生したサンプルプロジェクトを下記よりダウンロードできます。
パーツ点数が少ないため、2~3時間程度で組立が完了します。サーボが少ない分簡単にモーションが作れますので、HeartToHeart4の練習にも最適です。
また、Arduinoなどマイコンボードでの制御も比較的簡単に行えますので、次の機会にご紹介できればと思います。
以上です!