B3Mサーボモータを動かそう(準備編(2))
【関連記事】
第1回 B3Mサーボモータを動かそう(準備編(1))(改訂版)
第5回 B3Mサーボモータを動かそう(Arduino制御編)(改訂版)
第6回 B3Mサーボモータを動かそう(Python編(1))(改訂版)
●B3Mサーボモータを動かすまでの簡単な解説をします
B3Mサーボモータを購入して動かすところまで解説します。
前回、B3MサーボモータとPCを接続し、通信の確認を行いました。
今回は、B3M Manegerを用いて指定した角度に動作させます。
また、複数のB3Mサーボモータを動作させる場合に必要なIDの設定に関しても解説します。
●B3MサーボモータをB3M Manegerを用いて動かす
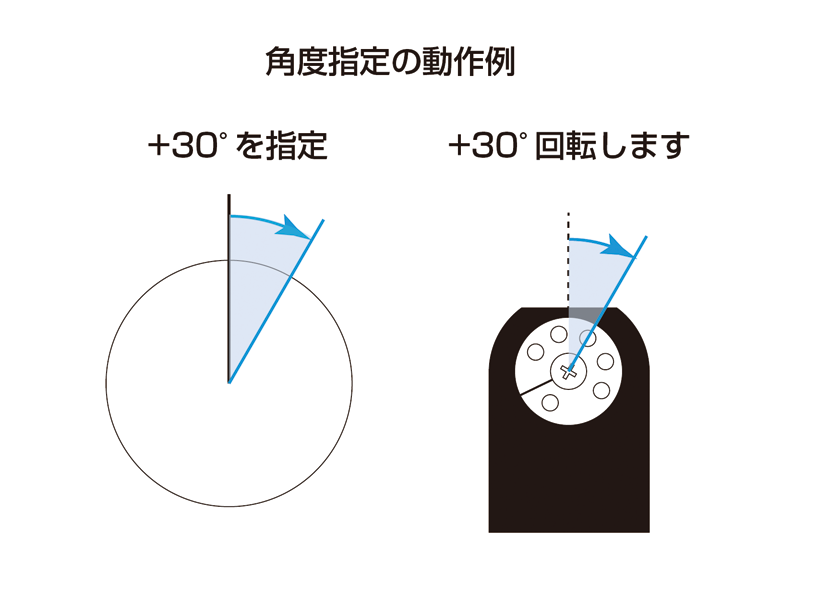
B3Mサーボモータには様々なモードがありますが、今回は「位置制御」モードで角度指定をしその位置に動かします。
B3Mサーボモータは起動時、何も制御していない「Free」モードになっています。
これを制御をかける「Nomal」モード(トルクON)状態にします。
「Options and Status」タブを開くと左下に「RunMode」が表示されます。
その「RunMode」の中にNomalがありますので選択し、「Trajectory」の下のWriteボタンをクリックします。
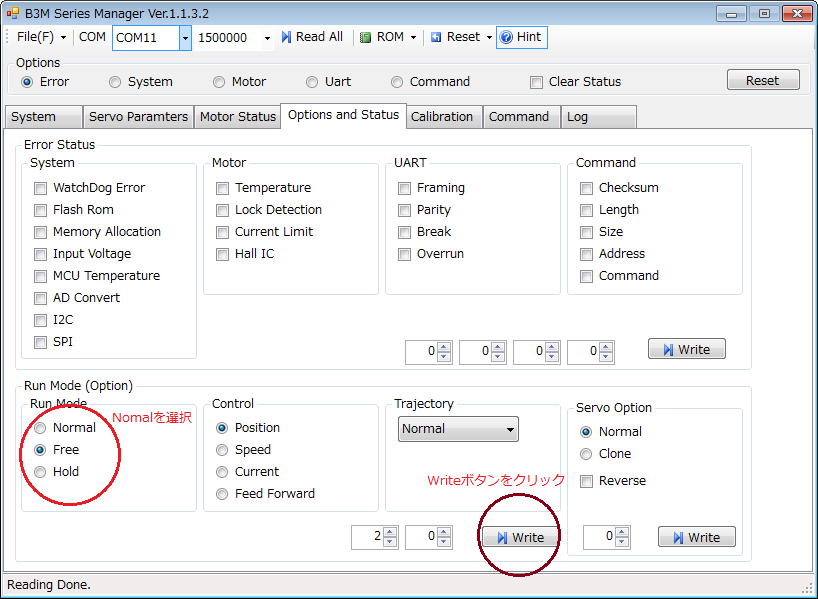
クリックと同時に「Nomal」モード(トルクON)状態になりますので、外力を加えた場合でも動かなくなります。
その状態にした後に角度指定を行い、その角度に移動させます。
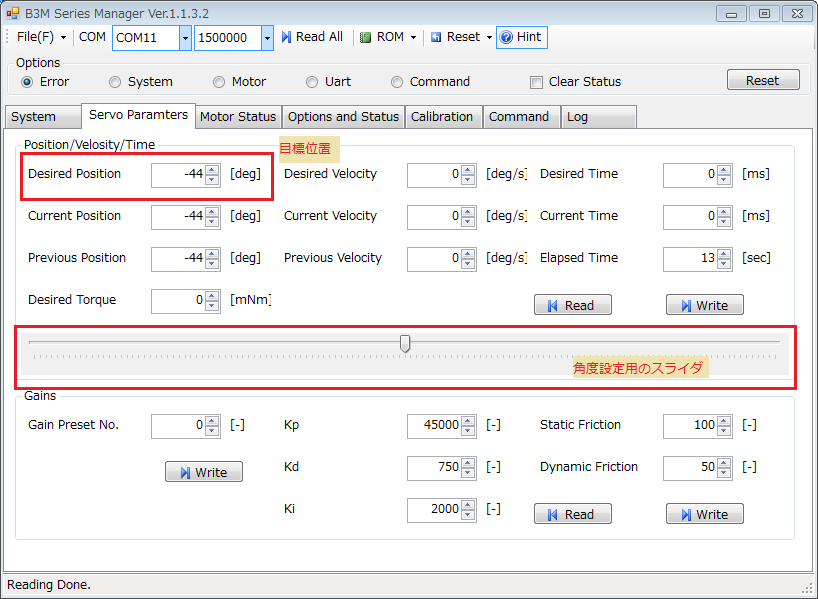
「ServoParamters」タブの中にスライダがありますので、それを動かすとスライダに対応しB3Mサーボモータも動きます。
角度指定をする場合は、「DesiredPosition」欄の数値を変更し、エンターキーを押すことで入力された角度データを送信できます。
角度については、100倍で表記していますので、1度の場合は100の値が入ります。
●IDの変更方法について
マルチドロップで接続しているため、個々のB3Mサーボモータにアクセスするために
IDを割り振り区別させています。
IDを書き換えるためには1個1個単体で接続・変更する必要があります。
前回準備編(1)で解説した手順にてB3MサーボモータをPCに接続し、B3M Manegerの
「System」タブ内「SystemConfiguration」に注目します。
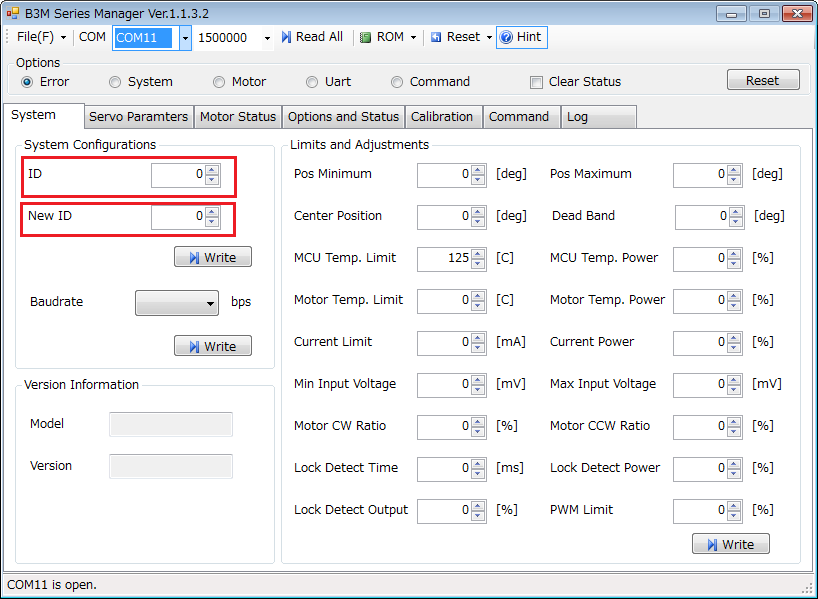
「ID」と「New ID」という項目があります。
ID =>アクセス(通信)するIDの番号(現在のID番号)
New ID => これから変更する変更後のIDの番号(書き換えたいID番号)
出荷状態はID:0になっていますので、これを例としてID:1に書き換えます。
「ID」欄に0(現ID番号)、「New ID」欄に1(書き換えたいID番号)を入れ、
その直下の「Write」ボタンを押します。
すると、接続されているB3MサーボモータのIDが1になります。
(設定可能なID番号としては0~254となります。)
IDを書き換えたのはいいのですが、この情報はサーボ内のRAMに書き込まれただけなので、
電源を遮断したり、リセットがかかった場合は消えてしまいます。
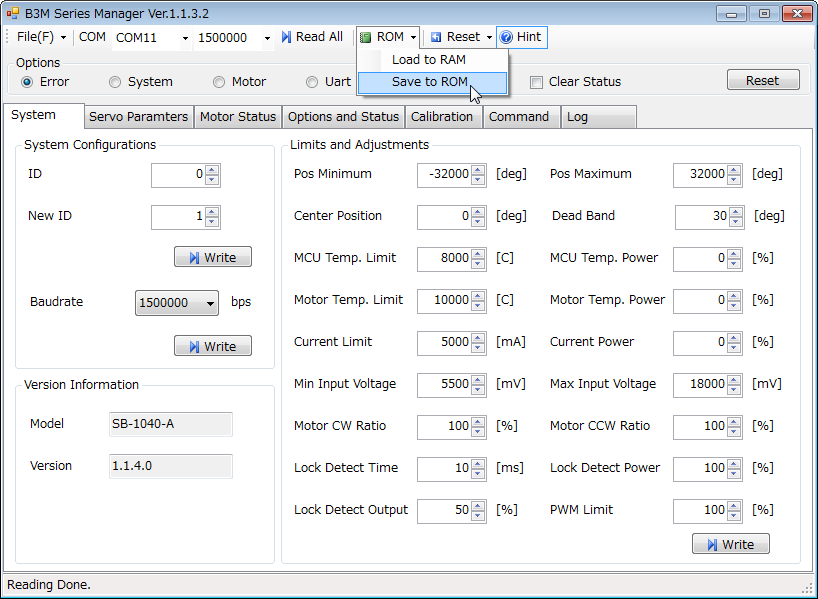
情報を保存するためには、B3M Manegerの上部の「ROM」ボタンをクリックし、
「Save to ROM」をクリックしてその状態を保存しておきます。
その後、「ROM」の隣の「Reset」ボタン(Immediately)をクリックし、リセットします。
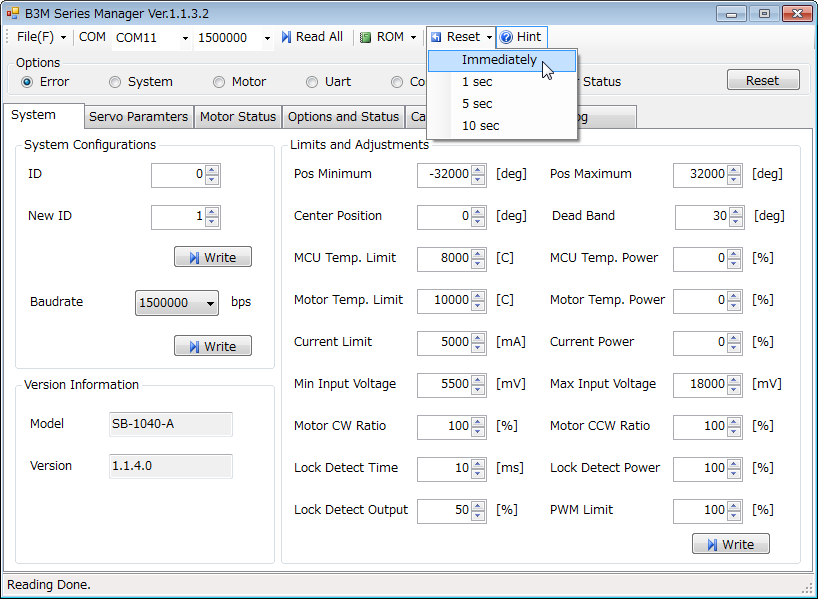
リセット後に「Read All」ボタンなどで設定したIDにアクセスできれば成功です。
変更したB3Mサーボモータにアクセスする場合は、「ID」欄に変更後のIDを
入れる必要があります。
(IDが分からなくならないようシール等でサーボに表記しておくことをお勧めします。)
また、IDが不明な場合はブロードキャスト(不特定多数用)IDとして、ID:255を入力し、希望のIDに
書き換えることが可能です。
今回は、B3Mサーボモータを動かし、ID番号を管理するところまで解説いたしました。
しかし、B3M Manegerソフトでは自由自在に動かせませんので、次回はWindousPCにてプログラムを作成し、動かす方法を解説したいと思います。
B3M-SB-1040-Aの詳細をみる B3M-SC-1040-Aの詳細をみる B3M-SC-1170-Aの詳細をみる の詳細をみる RS485USB/シリアル変換アダプターの詳細をみる