PMXサーボを使ってみよう PCから制御「準備編」
PMXサーボは、RS-485規格の信号に変換できるアダプタを使用することで、PCから制御することが可能です。この記事では、PCから制御するために必要な製品と接続方法について解説します。
■PMXサーボラインアップ

こちらのカテゴリーをご参照ください。この記事の情報は、すべてのPMXサーボに対応しています。
■PCから動かすために必要な製品
・接続機器:RS-485 USBアダプターHS
・電源分配基板(6pin端子)(アダプターに付属)
・電源ケーブル:電源ケーブルA(アダプターに付属)
またはHV電源スイッチハーネス
・電源:9.0~12.0V出力の安定化電源(電流はサーボの機種、個数で変わります)
LiFeやLiPoの3cell等のバッテリー
例)ROBOパワーセルF3-850
ACアダプター(消費電流はサーボの機種、個数で変わります)
例)ACアダプター(12V5A)
必要な製品はRS-485 USBアダプターHSのセットに付属していますので、あとは電源をご用意いただけましたらPMXサーボの準備は完了です。
■RS-485 USBアダプターについて

PMXサーボの通信はRS-485規格に準拠しています。差動信号のためノイズに強く、3Mbpsの高速通信が可能です。デイジーチェーン接続で最大239個(理論値)のサーボを接続することができます。
RS-485 USBアダプターを使用することで、PCのUSBポートをRS-485規格の通信に変換することができます。
アダプタ本体には、D+、D-、GNDの端子があります。こちらを付属の「電源分配基板(6pin端子)」を中継し、電源と組み合わせて機器に接続します。電源分配基板(6pin端子)には、バッテリや安定化電源などの電源を接続します。電源分配基板(6pin端子)の電源端子は電源と直結されていますので、そのままの電力がサーボに給電されます。
■接続方法
下記の図を参考に機器を接続してください。
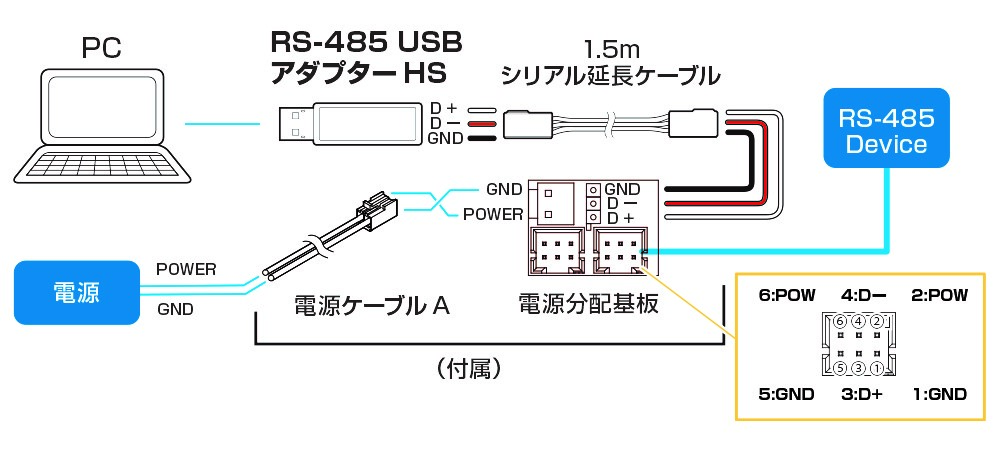
■電源の接続について
「電源分配基板(6pin端子)」の電源端子に使用できるケーブルとして「電源ケーブルA」が付属しています。片側はコネクタが圧着されていませんので、使用する電源に合わせて加工してください。※電源の極性にご注意ください。

以下は電源ケーブルAに圧着されているコネクタと、電源分配基板の電源端子に実装されているコネクタの型番です。ケーブルを自作する際に参考にしてください。
・ケーブルに圧着されているコネクタ
ハウジング:VHR-2N
コンタクトピン:SVH-21T-P1.1
・電源分配基板の電源端子
コネクタ:B2P-VH
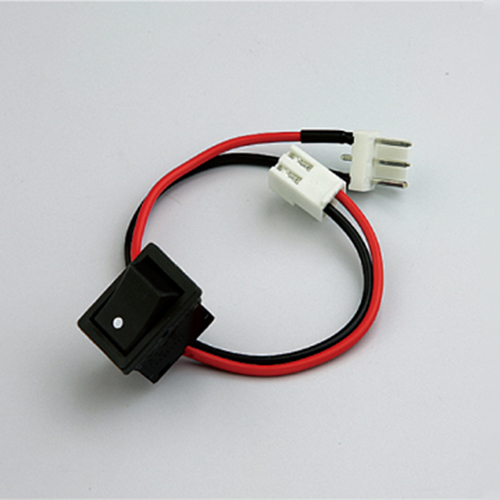
近藤科学のROBOパワーセルをご利用いただく場合は、電源スイッチハーネスをご利用いただくと便利です。
・HV(9~12V)バッテリの場合:HV電源スイッチハーネス
■開発環境
Visual Studio Code 等を使用して Pythonが動く環境の整備とシリアル通信でpySerialを使用しますので、pySerialをインストールてください。
※弊社は各ソフトウェアのサポートはできませんので、本記事では開発環境の解説は省略します。
■KOドライバをインストール
RS-485 USBアダプターHSをPCに認識させるためにKOドライバをインストールします。下記のページからファイル一式をダウンロードしてください。Windowsの場合は、ダウンロードしたフォルダ内にある付属のマニュアルをご参照ください。
Linux系のOSの場合は、下記の記事をご参照ください。弊社ではRaspberryPiのRaspbianOSにて動作を確認しました。
■PMX Library for Python
PCから制御するプログラムは、「PMX Library for Python」を例に解説します。以下のページからzipファイルをダウンロードし、任意の場所に解凍してください。
■オンラインマニュアル
PMXシリーズのサーボモータを制御するためのオンラインマニュアルを公開しています。PMXサーボを制御するための詳しい情報が記載されていますので、記事の解説と一緒にご一読ください。
以上で準備は整いました。次回からは下記の順でPMXを制御する方法を解説します。
『サーボに動作を指示するMotorWRITEについて』で実際にサーボが動作します。もしすぐに動かしたい場合は、『サーボに動作を指示するMotorWRITEについて』からご一読ください。
次の記事『PMXサーボを使ってみよう PCから制御「MemREAD編」』
PMX-SCR-9204HVの詳細をみる PMX-SCR-9203HVの詳細をみる PMX-SCR-5204HVの詳細をみる PMX-SCR-5203HVの詳細をみる