
KXR-L2 ヒューマノイド型をご紹介!
今回は、いよいよ出荷開始になりましたKXR-L2 ヒューマノイド型の本体仕様ついてご紹介します!
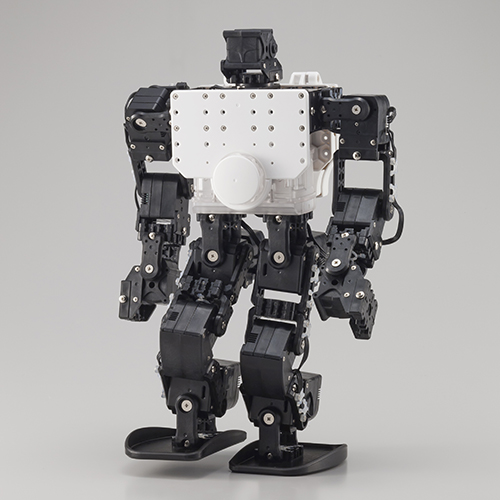
●商品紹介『KXR-L2 ヒューマノイド型』
■ロボット本体
全身にKXRシリーズの強化樹脂パーツを使用していますので、二足歩行に必要な十分な強度を確保しています。
首はダミーサーボを使用していますが、ここをサーボモータに交換することで「うなずく」などのしぐさができるようになります。。
また、手首を別売りのグリッパーハンドセットに換装することもできます。
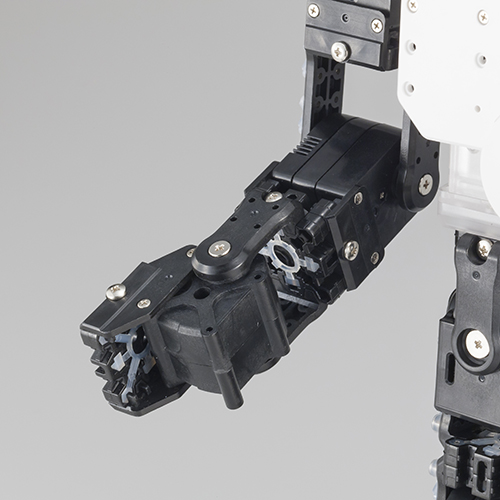
●商品紹介『グリッパーハンドセット』
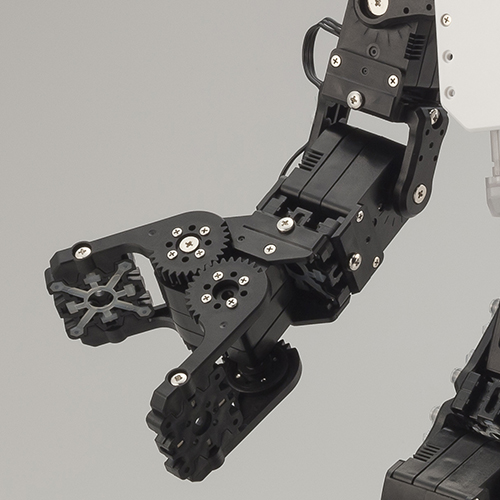
脚部は、直行軸を採用しています。サーボ2個の軸の高さをそろえることができますので、搭載スペースをコンパクトに抑えることができます。

KXRシリーズのオプションパーツを組み合わせれば自分だけのロボットにカスタマイズできます!
ぜひオリジナルロボットに調整してください!
このロボットは組立キットです。詳細な組立説明書が付属していますので、1から手順通りに行えばどなたでも組み立てられるように設計されています。構造が少し複雑な部分もありますが、このブログでも組み立てのポイントをご紹介しますので安心してご利用ください。
■サーボモータ

ロボットの関節に使用しているサーボモータは、モータとギヤボックス、角度センサーと制御基板が一体となっています。

このことにより、コントロールボードから角度を指定するだけで、簡単に動作することができます。さらに、速度(スピード)や保持力(ストレッチ)なども調整可能です。
サーボモータを各関節に使用することで、コントロールボードから一斉に角度情報を送り、ロボットの複雑な動作を短時間で正確に制御することが可能なのです。
KXR-L2に使用しているサーボは、KRS-3301 ICSです。
●商品紹介『KRS-3301 ICS』
トルク6kgf・cmを出力し、正確な動作でロボットのモーション再現度を向上させています。また、ギヤのかみ合わせにトコトンこだわりましたので、静音であり、モータに余計な負荷がかからない分耐久性も確保しています。
サーボに固有のIDを持たせることでサーボ同士をつなぐマルチドロップ(デイジーチェーン)接続が可能ですので、コントロールボードにつなぐケーブルの本数を減らすことができ、配線も簡単にできます。

さらに、KRS-3301の強化版であるKRS-3304 ICSは、3301とケースが同寸法ですのでそのまま付け替えることができます。特に脚部のサーボを交換すると、歩行の安定性が飛躍的に向上しますので非常にオススメです!

●商品紹介『KRS-3304 ICS』
■コントロールボード
コントロールボードは、ロボットに搭載されているサーボ、センサー、無線操縦用の受信機などすべてのデバイスを制御するためのボードです。ロボットが動作するための頭脳の役割をしています。
KXRシリーズでは、共通してRCB-4miniを使用しています。
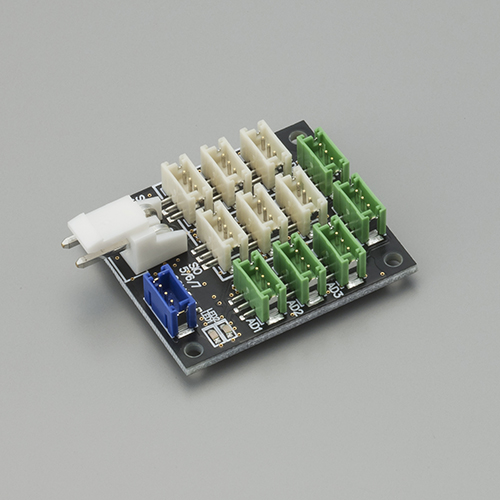
●商品紹介『RCB-4mini』
RCB-4miniはRCB-4HVの小型バージョンです。2系統・6端子のSIOポート(シリアル端子)と5個のセンサーポート(アナログ端子)を持っています。
KRS-3301 ICSサーボはマルチドロップ(デイジーチェーン)接続でサーボ同士を接続できますので、サーボのラインの末端をSIOボードにつなげることで制御が可能になります。一つの端子に7~8個のサーボを接続することができます。
センサーポートには、急な回転を検知するジャイロセンサーやロボット全体の傾きを検知できる加速度センサーを接続できます。これらのセンサ情報を動きに反映させることでロボットの歩行を安定させたり、転んでいる等を検知し自動的に起き上がらせる事ができます。
また、PSDセンサー(距離センサ)など5Vのアナログ出力のセンサーを接続することも可能です。
■モーション作成ソフト
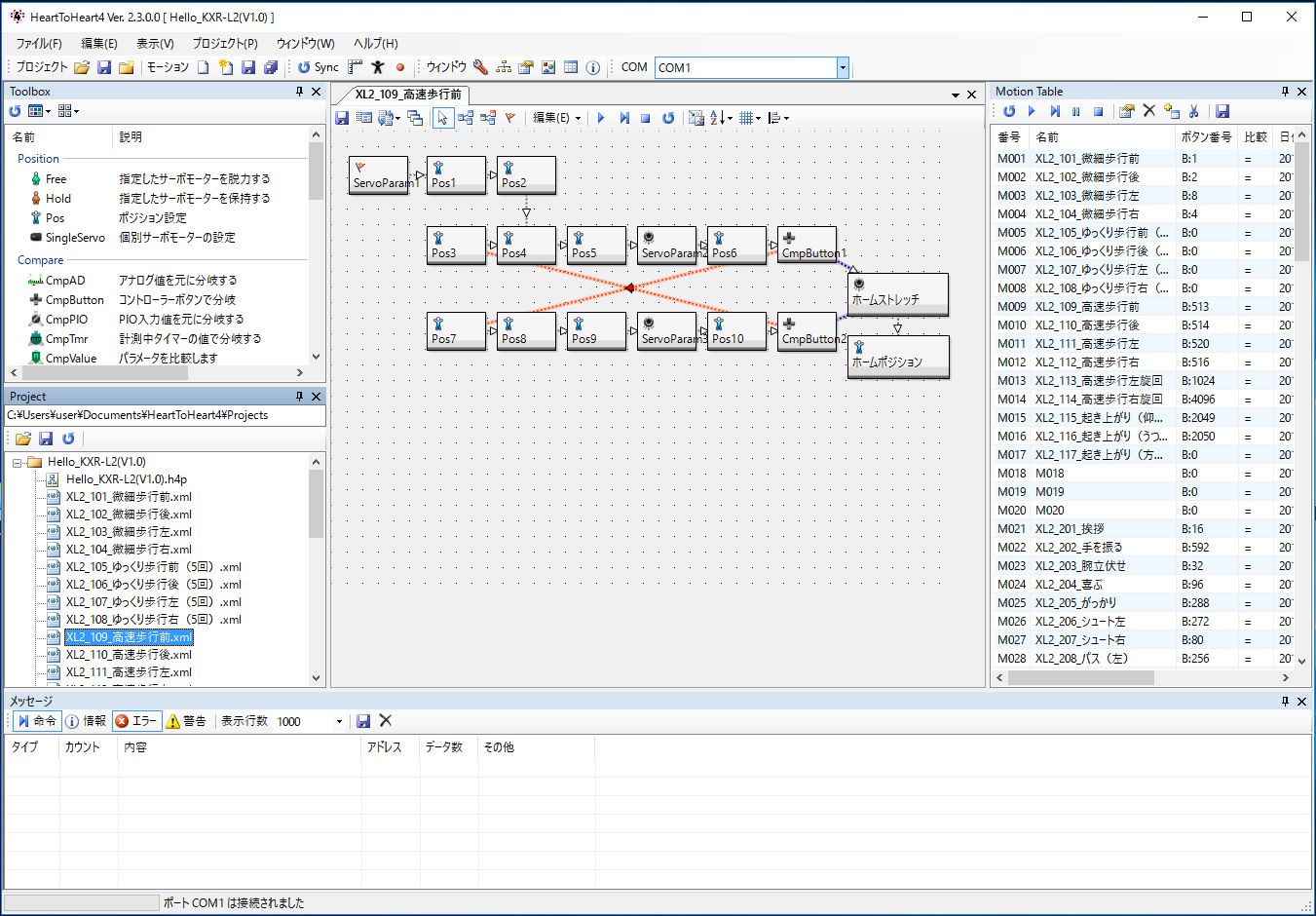
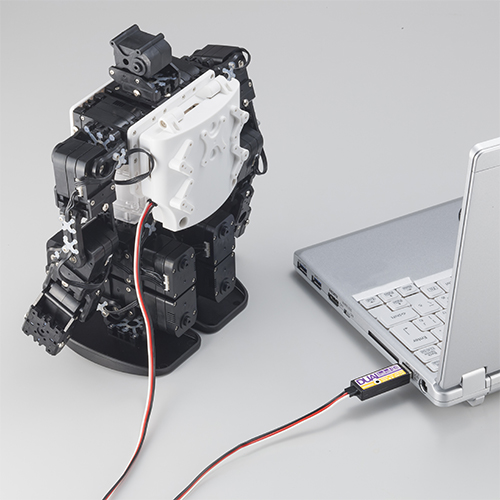
モーションの作成にはキット付属の専用のソフトHeartToHeart4を使用します。
●商品紹介『HeartToHeart4』
このソフトは、ロボットの調整からモーションの作成、登録、再生、さらにセンサーの制御などロボットの動作に必要なあらゆる機能が備わっています。
プログラミング言語など難しいの知識は必要せず、ほとんどの作業をマウス操作だけで直観的にロボット全体の動きを作成することができます。
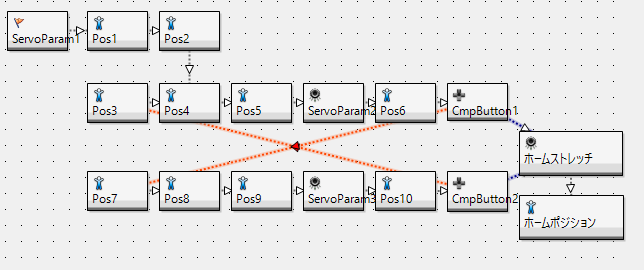
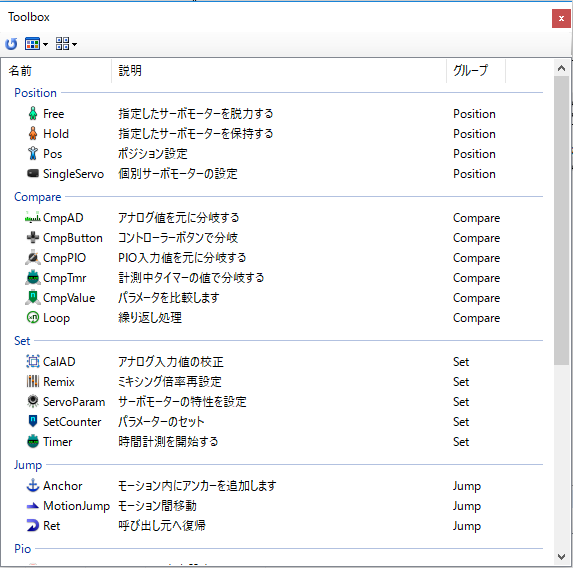
モーションの作成は、コントロールと呼ばれるブロックを並べてつなげるだけで行えます。この一つ一つのコントロール内にロボット全身のサーボの角度を指定できるスライドバーが用意されていますので、スライドバーを動かしてロボットの各ポジションのポーズを指定していきます。
そして、コントロールをつなげて再生することで一連の動作を行うことができます。
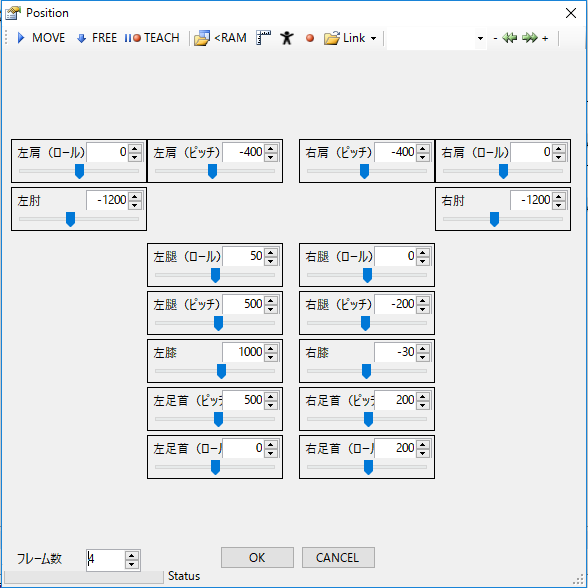
逆に、ロボットを動かしてポーズを作り、ソフトに反映させることもできます。これを『教示機能』と呼びます。
センサーの値によって動きを分岐したり、無線コントローラのボタンの状態によって繰り返し動作を行ったりと、アイデア次第で多彩な動作を行えます。
ロボットが組み上がりましたら、ぜひオリジナルモーションの作成にチャレンジしてください!
■サンプルモーション
キットにはサンプルモーションが付属していますので、組み上がったらすぐにロボットを歩かせることができます。
サンプルモーションは、前進後進などの複数のパターンの移動系と、あいさつやシュートなどの多彩なモーションをご用意しています。
以下の動画からサンプルモーションの動きをご覧ください。
以上です!
いかがだったでしょうか?
次回からは、組み立てのポイントをご紹介していきます!
KXR-L2 ヒューマノイド型をぜひよろしくお願いします!!