




KHR-3HV Ver.2 セレクトパック
価格: オープン
販売終了
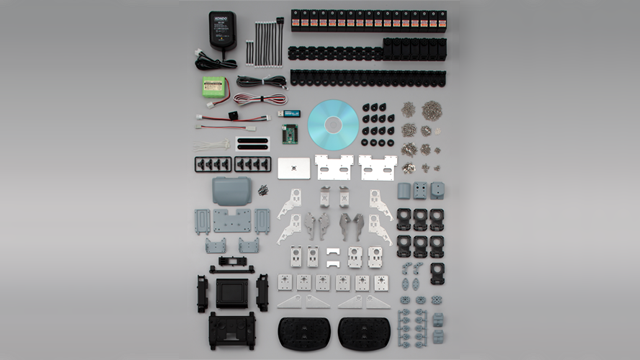
<キット内容>
- 軽量アルミ合金フレーム(アルマイト処理済)
- サーボアーム等樹脂パーツ
- サーボモータKRS-2552RHV ICS ×17
- DualUSBアダプターHS + 通信用シリアル延長ケーブル
- ビス類
<ソフトウェア動作環境>
・対応OS/Windows 8.1 10
※使用する.NETのシステム要件を満たすこと。
・USBポート(1.1/2.0)
<完成時サイズ>
401.05(H)×194.4(W)×129mm(D)
<重量>
約1500g(ボード、バッテリー、ケーブル含む)
【ダウンロード資料】
組立説明書、各種ソフトウェアはこちらからダウンロードしてご利用ください。

※2020年7月出荷分より、CD-ROMが付属しなくなりました。本商品のマニュアル、ソフトウェアに関しましては、上記のダウンロードボタンよりダウンロードしてご利用ください。
Made in Japan
商品説明
二足歩行ロボットKHR-3HVは、トルクの高いサーボを採用することで歩行精度の向上とモーションの自由度がさらに上がっています。全身のサーボをすべてメタルギヤに変更し耐久性が向上。ロボットのシルエットもより人間に近づけることができ、スタイリッシュになりました。さらにコントロールボードはさらに使いやすく多機能になり、より複雑な動作が可能になりました。センサーを最大10個接続することができます。
モーション作りやメンテナンスには付属の便利で初心者でも使いやすいHeartToHeart4を使用します。HeartToHeart4に関しましてはこちらをご覧下さい。
セレクトパックは、KHR-3HV ver.2のセットから”コントロールボード”、”ケーブル”、”バッテリー”、”充電器”を除いたセットです。
各パーツをオプションから選択することでユーザーの好みに合わせてセット内容を作ることができます。
詳しいセット内容はこちらのPDFをご参照ください。
▼組み合わせ例【1】
・本体:KHR-3HV Ver.2 セレクトパック
・コントロールボード:RCB-3HV ボードのみ (No.03027)
・ケーブル:ZH接続ケーブルセット【KHR-3HV PWM用】 (No.02118)
・バッテリー:ROBOパワーセル F3-850タイプ (Li-Fe) (No.02171)
・充電器:BX-20LF (No.51202)
Ver.2で使用しているKRS-2552RHVは、付属のDual USBアダプターHSを使用してPWMモードに変更できますので、ZH接続ケーブルセット【KHR-3HV PWM用】と組み合わせればRCB-3でKHR-3HVを動かすことが出来ます。
RCB-3HV(アップデート済み)では、各端子をシリアル対応に 変更できますのでサーボがシリアルモードのままでもご利用いただけます。
ZH接続ケーブルセット【KHR-3HV PWM用】は、各サーボからボードへ1:1で配線するためのケーブルをセットにした商品です。通常は、サーボ同士を接続するデイジーチェーン接続にて配線しますが、PWMモードではサーボごとにボードと接続する必要があるため、通常セットからケーブルの種類を変更する必要があります。このケーブルセットを使用すれば、1本ずつ選択してご購入いただくよりお得にご用意することが可能です。
▼組み合わせ例【2】
・本体:KHR-3HV Ver.2 セレクトパック
・コントロールボード:RCB-4HV ボードのみ (No.03076)
・ケーブル:ZH接続ケーブルセット【KHR-3HV シリアル用】 (No.02119)
・バッテリー:ROBOパワーセル F3-850タイプ (Li-Fe) (No.02171)
・充電器:BX-20LF (No.51202)
サーボをシリアルモードで使いたい場合は、RCB-4HVとZH接続 ケーブルセット【KHR-3HV シリアル用】とRCB-4HVをご使用下さい。
なお、こちらの内容はKHR-3HV Ver.2(No.03070)の通常のセット内容 と同じになります。
関連するオプション
-

RCB-4HVボードのみ
コード: 03076 ¥13,200 (税込)シリアルサーボ専用コントロールボード。KHR-3HVやKMRシリーズ、カメ型ロボット02で使用されています。付属のHeartToHeart4を使えば簡単にモーションを作れます。
-

AC急速充放電器MX-201 Dタイプ専用
コード: 03053 ¥6,600 (税込)KHR-3HV、KMR-M6/P4、カメ型ロボット02付属のROBOパワーセルHV Dタイプ(9N-800mAh Ni-MH)専用急速充放電器です。ボタン操作で【充電】【放電】の切り替えが可能です。AC100V対応。
【重要】本製品はDタイプ専用です。Dタイプ以外のバッテリーは、絶対に充電しないでください。 -

RCB-3HVボードのみ
コード: 03027 ¥17,600 (税込)KHR-2HV/1HVに搭載され多くの自作ロボットユーザーに愛用されているRCB-3HV。現在発売されている「RCB-3HV」のボードのみのセット。ボードのバージョンは、最新版のVer.1.1A。HeartToHeart3と合わせてご利用下さい。
-

ZH接続ケーブルセット 【KHR-3HV シリアル用】
コード: 02119 ¥5,500 (税込)KHR-3HVのサーボモータをデイジーチェーン接続するためのケーブルセットです。KHR-3HV Ver.2セレクトパックとあわせてご利用下さい。
-

ZH接続ケーブルセット 【KHR-3HV PWM用】
コード: 02118 ¥4,400 (税込)KHR-3HVの各サーボモータからバックパックへケーブルを個別に配線するためのケーブルセットです。KHR-3HV Ver.2セレクトパックとあわせてご利用下さい。
-

KONDOドライバーセット1
コード: 02095 ¥3,850 (税込)KHRシリーズの組み立てに必要なドライバーを1つにまとめました。 初めてロボットを作る方の工具セットとしてご利用頂けます。 また、ドライバーのビットは大変精度がよいので、上級者の方でも 満足してご使用いただけます。
六角ドライバーはクランプホーンを締めるビスにお勧めです。 -

ROBOパワーセルHVDタイプ10.8V-800mAh(Ni-MH)
コード: 01104 ¥4,620 (税込)HVシリーズ用ニッケル水素バッテリー。HVコネクタ仕様。容量は800mAh。Cタイプと比べて長時間駆動が可能です。
