
首のダミーサーボをサーボに交換する
KXR-L2 ヒューマノイド型は、キット標準の状態では首にダミーサーボが使用されていますので、この箇所をサーボに交換することで首を左右に振ることが可能になります。
今回は、首のダミーサーボをサーボに交換してみます。
■必要なパーツ

・KRS-3300シリーズ(3301 / 3302 / 3304 / 3304R2) ×1
ビス関連はそのまま使用できます。
■交換方法
【1】ダミーサーボを取り外す
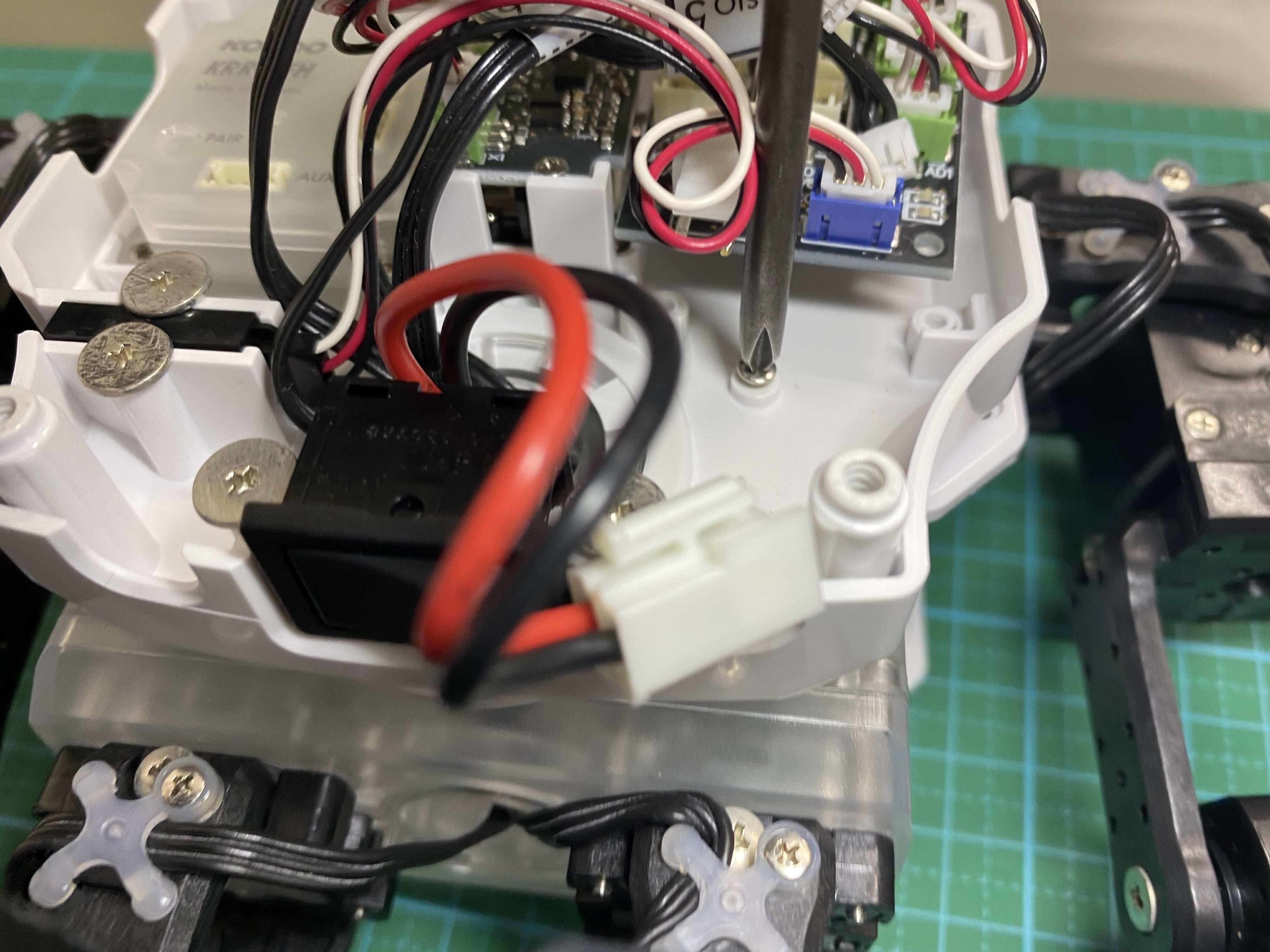
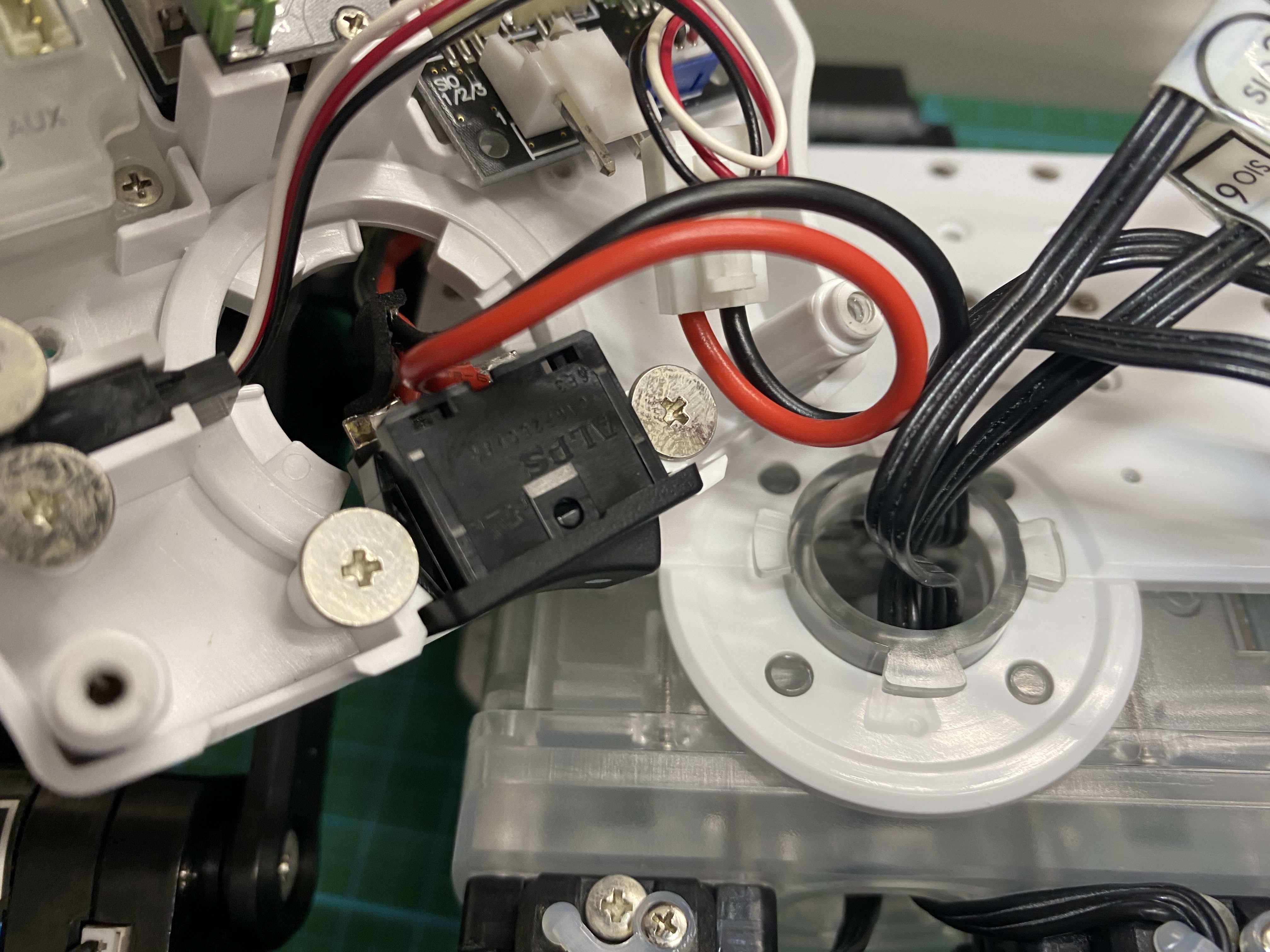
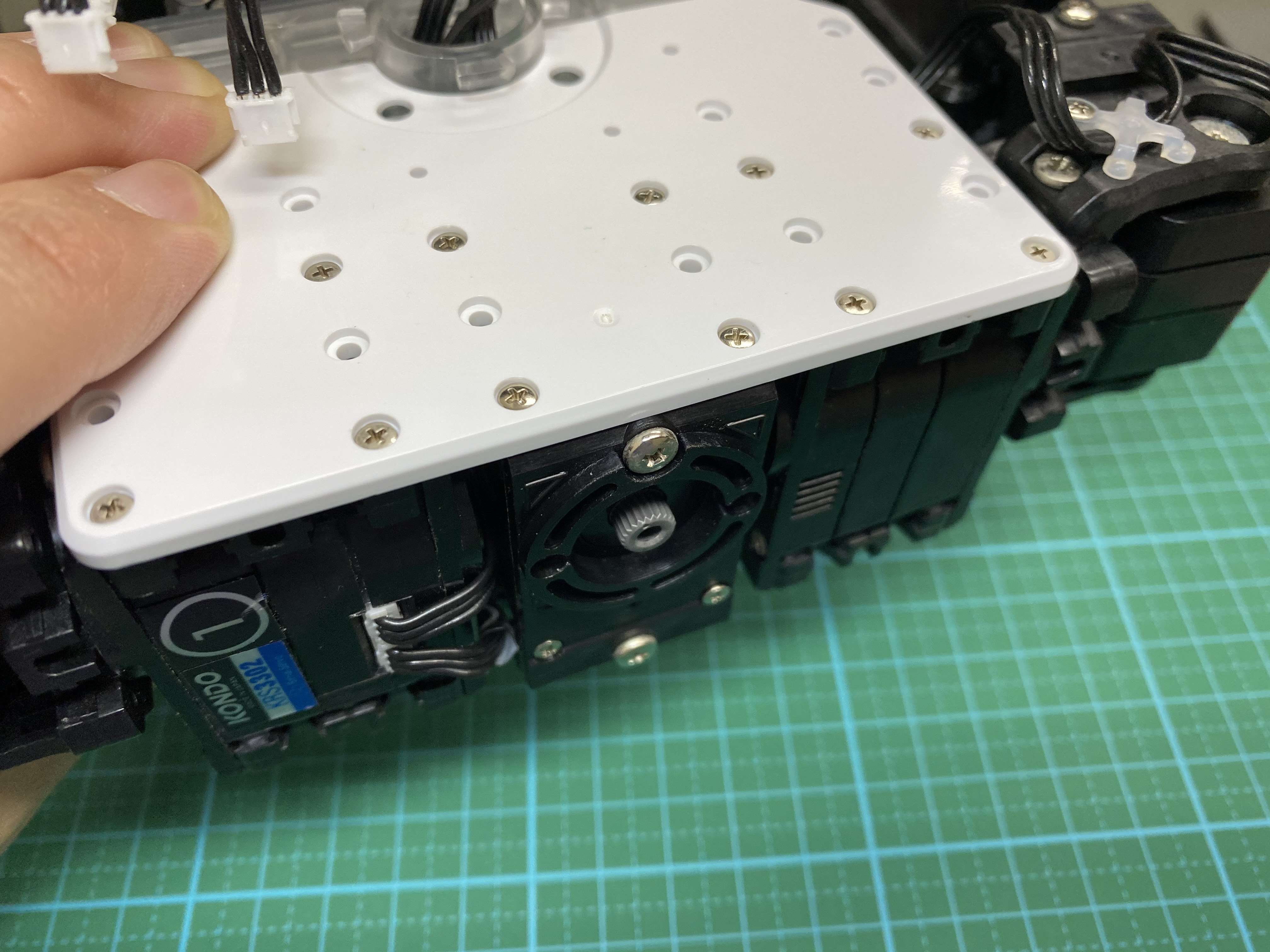
1)バックパック内のRCB-4miniに接続しているサーボのケーブルを全て外します。(センサー類など他のケーブルはそのままで大丈夫です。)RCB-4miiniを固定しているビスを取り外し、バックパックを固定しているM2-6ビス×2本を外してバックパックをボディから取り外します。
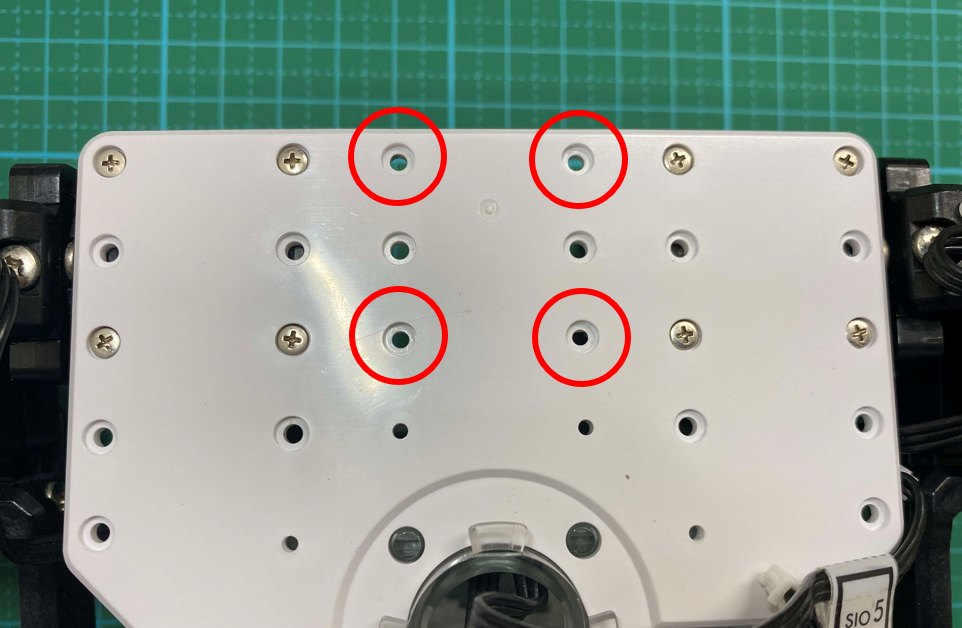
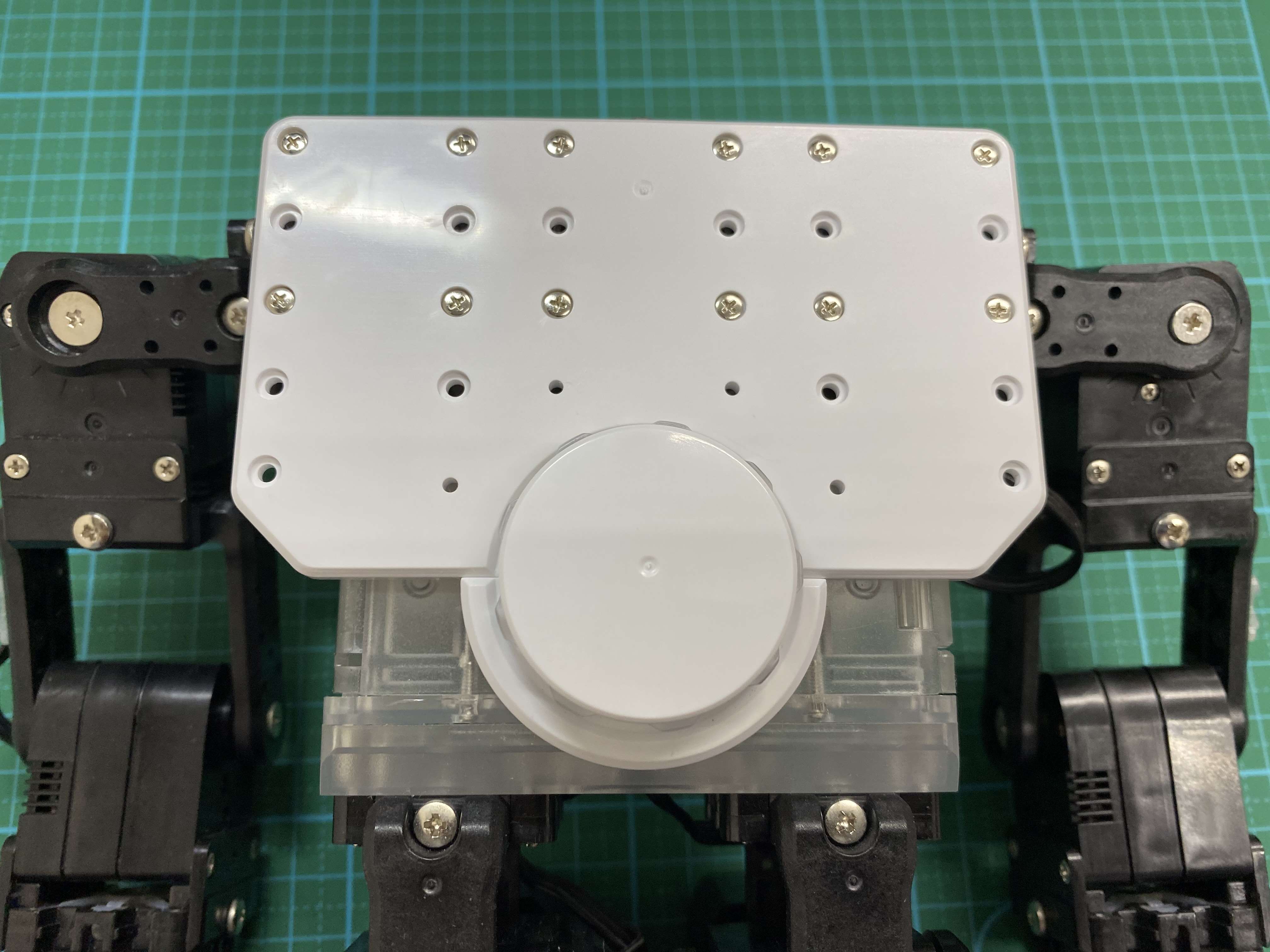
2)ボディ前面のロックリングとM2-8ビス×12本を外し、ボディパネルを取り外します。
※前面のボディーパネルを外すと、上半身ごとバッテリーボックスから外れますのでご注意ください。
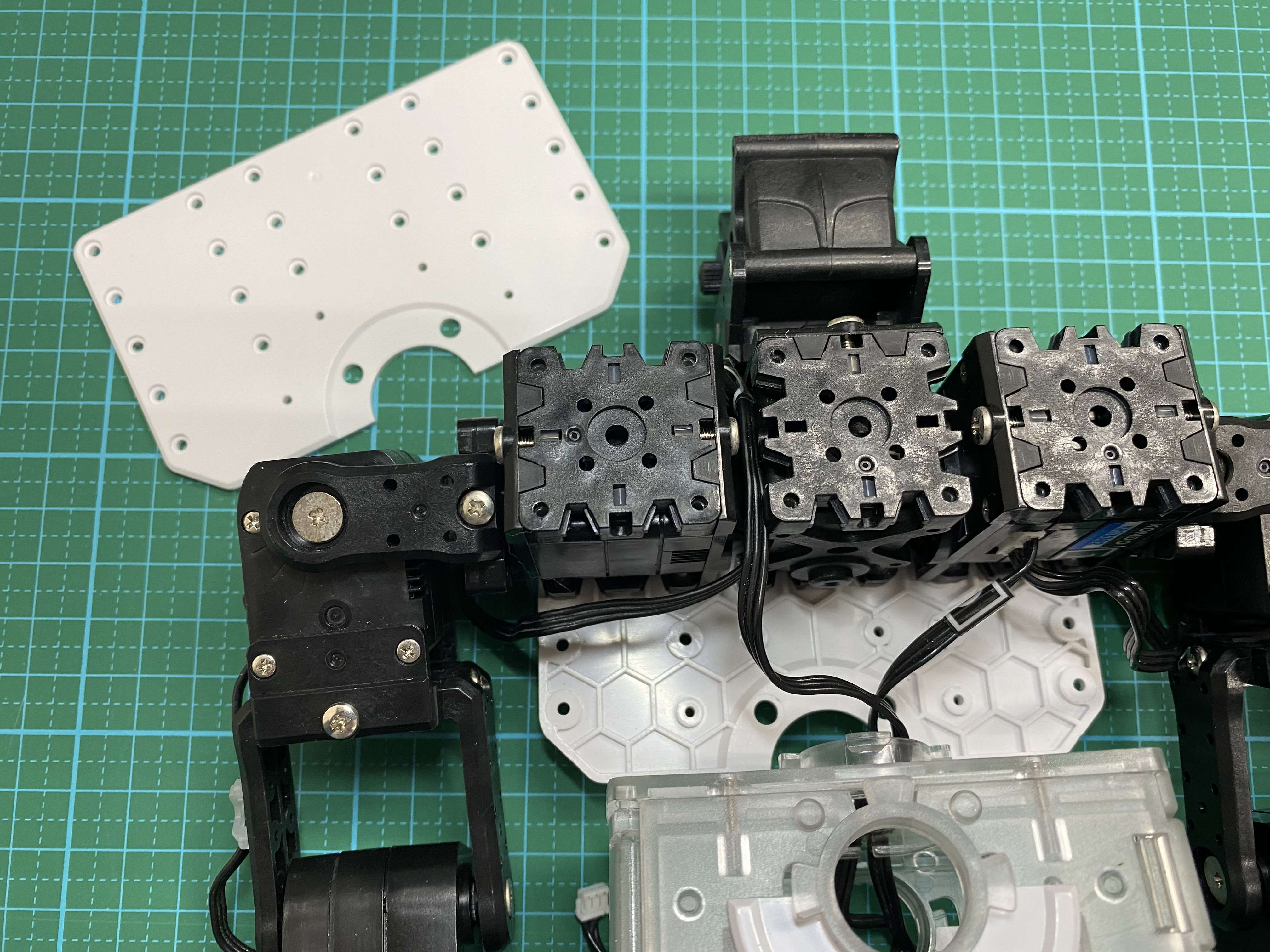
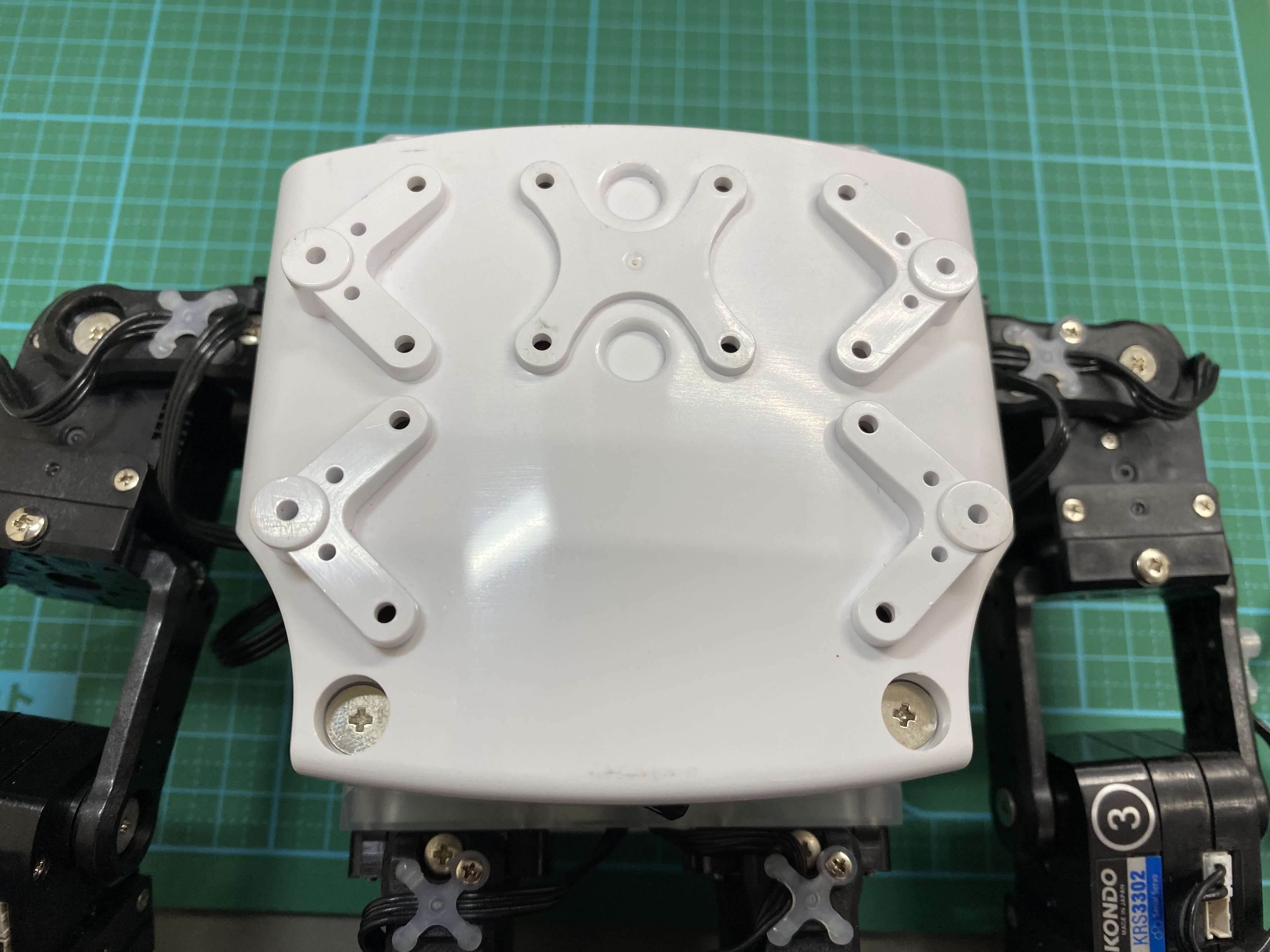
3)ボディ背面の首のユニットを固定しているM2-8ビス×4本を外します。
以上で首のユニットが下の画像のように外れます。

【2】サーボを組み付ける
1)頭のダミーサーボを固定しているM2-6ビス×4本を外して、ダミーサーボを取り外します。その後、首のダミーサーボに固定しているM3-8低頭ホーン止めビスを取り外し、ダミーサーボからジョイントベースを外します。
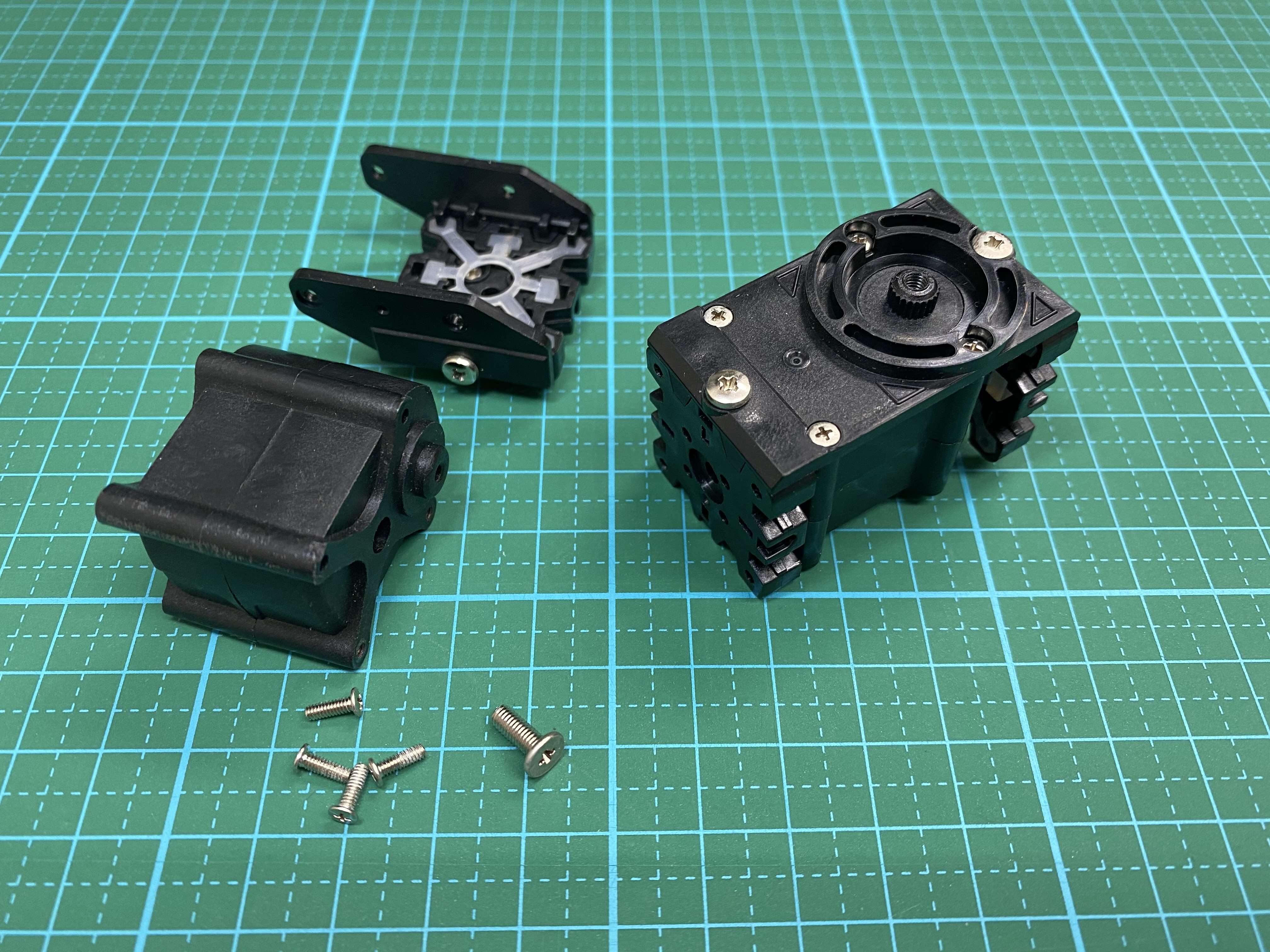
2)首のユニットからダミーサーボを取り外します。サーボスペーサー3300AのM2-6ビス×4本を外せば簡単に取り外せます。
3)交換するサーボはICS3.5/3.6マネージャーを使用してIDを10に変更しておきます。IDの設定方法は、KXR-L2の組立説明書(Ver.2以降)をご参照ください。
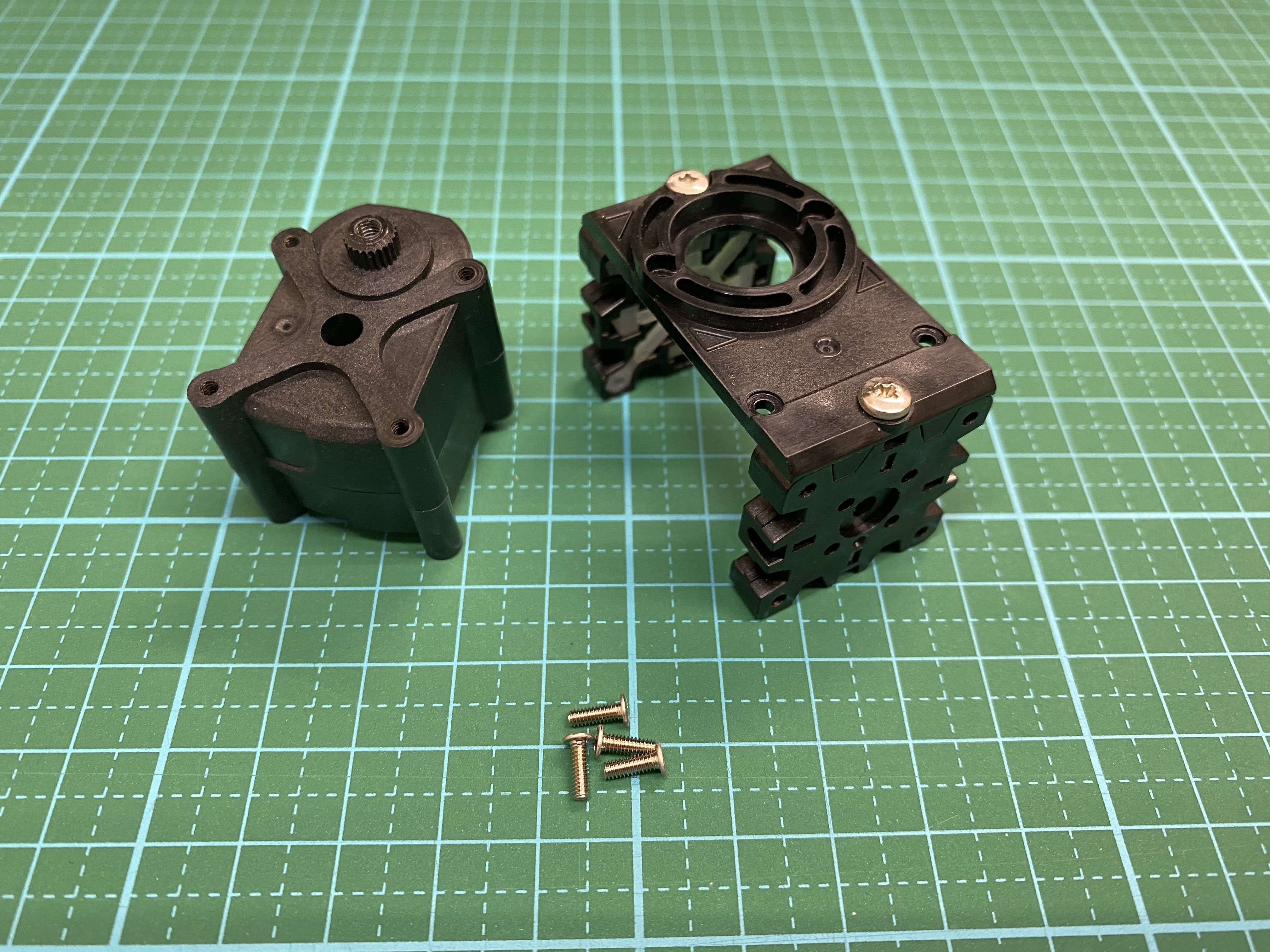
4)ダミーサーボが固定されていた場所に交換用サーボを固定します。使用するビスは、ダミーサーボと同じM2-6ビス×4本を使用してください。

以上で、画像のようなユニットが出来上がりました。
【3】ケーブルを配線する
1)左肩ID1のサーボからボードに接続されている160mmのケーブルを外し、新しく取り付ける首ユニットのサーボに接続します。
2)次に、新しく用意したZH接続ケーブル2A(120mm)のケーブルを首ユニットのサーボに接続し、反対側を左肩ID1に接続します。
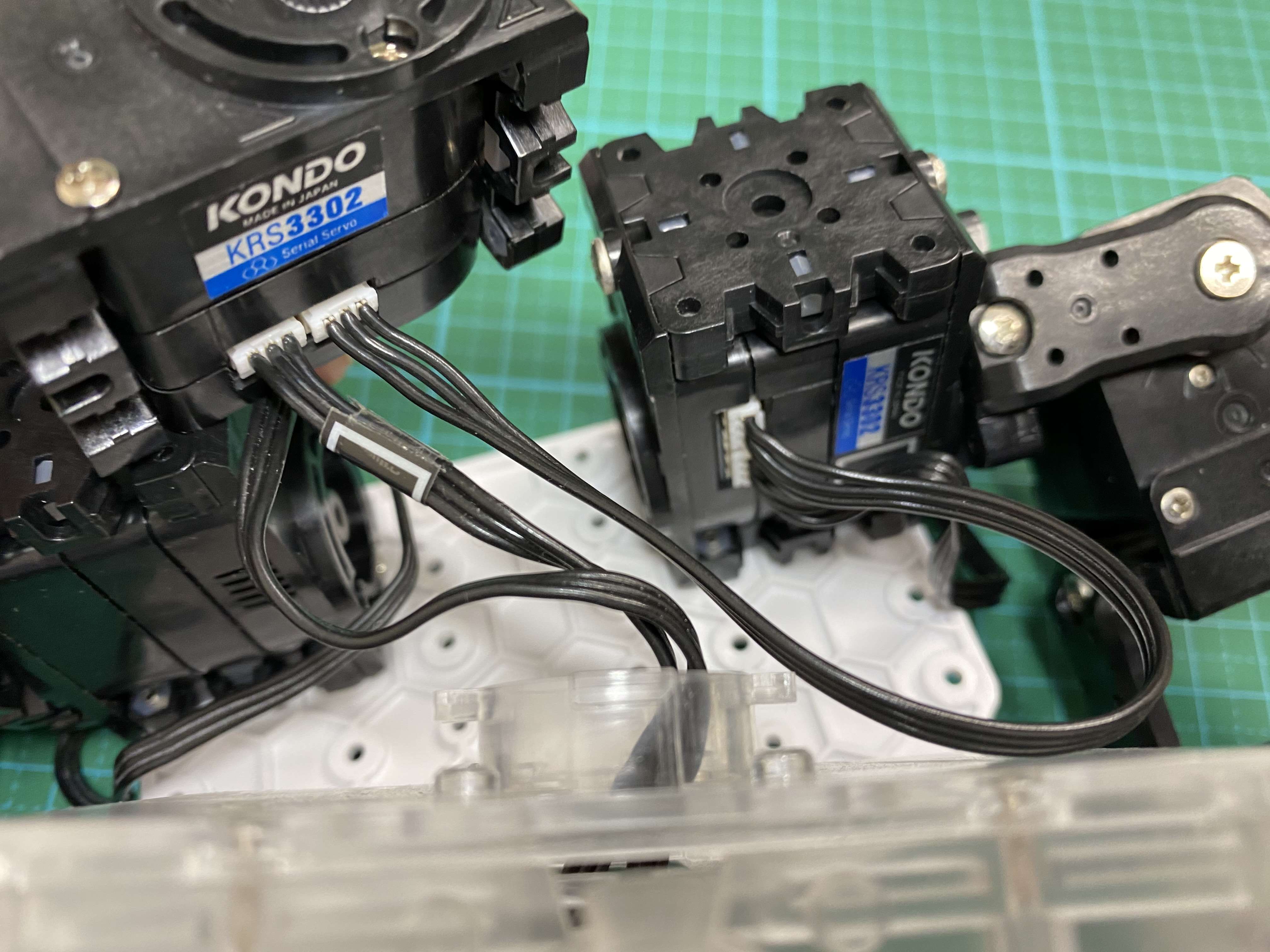
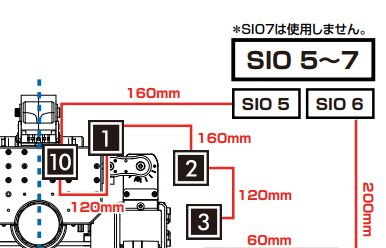
以上で配線は完了です。
【4】組み直す
1)ばらしたときと同じ手順で首ユニットをボディーに固定します。まずは、背面のボディパネルにM2-8ビスで首ユニットを固定してください。この時に、首サーボの出力軸が背面寄りになるように向きに注意してください。
2)次に前面のボディパネルを元のように固定します。ケーブルの挟み込みにご注意ください。
3)バックパックを元のように固定し直し、M2-6ビス×2本で固定します。
4)頭のジョイントベースをサーボの軸に対してまっすぐに取り付けM3-8低頭ホーン止めビスで固定します。

5)頭のダミーサーボをM2-6ビス×4本で固定すれば完成です。

■HeartToHeart4のプロジェクト
ロボットに首のサーボを追加できたら、最後はソフトウェアの操作です。実は、首サーボを搭載した場合のサンプルプロジェクトが公開されています。下記のページからダウンロードしてご利用ください。
また、KXR-L2の首サーボ付きの組み立て方について組立説明書を公開していますのでこちらも参考にしてください。
『KXR-L2C4 ヒューマノイド型 取説・サンプル Ver.2.0』
以上で交換は完了です!